SER04989020_YVL88II Service_J.pdf - 第183页
3- 162 SER04989020 調整 第 3 章 7 7.3.2 搭載実行: 「 ADJUST_CHIP」 準備が完了したら、まず「 ADJUST_CHIP」 を使って、ヘッド 1 で部品を試搭 載します。ヘッド 1 での調整が済んだら、ヘッド 2 での部品搭載をします。 1 安全を確認して、非常停止を解除します。 非常停止ボタンを回転解除し、Y P U の [READY] ボタンを押してください。 e 2 自動運転での基板を指定…
3-
161
SER04989020
調整
第
3
章
7
7
補助調整を実行して、部品が認識できることを確認します。
補助調整の詳細は、マウンターのオペレーションマニュアルをご覧ください。
8
基板データを保存します。
[ESC]キーを2回押してから、「D0 基板データ保存、終了」を選択実行してく
ださい。
e
9
非常停止ボタンを押してから、コンベアユニットを調整しま
す。
基板に合わせて、ロケートピンやプッシュアップを調整してください。
0
テープフィーダーをフィーダープレートにセットします。
指定されたフィーダーセット番号の位置(この場合は「11」)に取り付けてく
ださい。
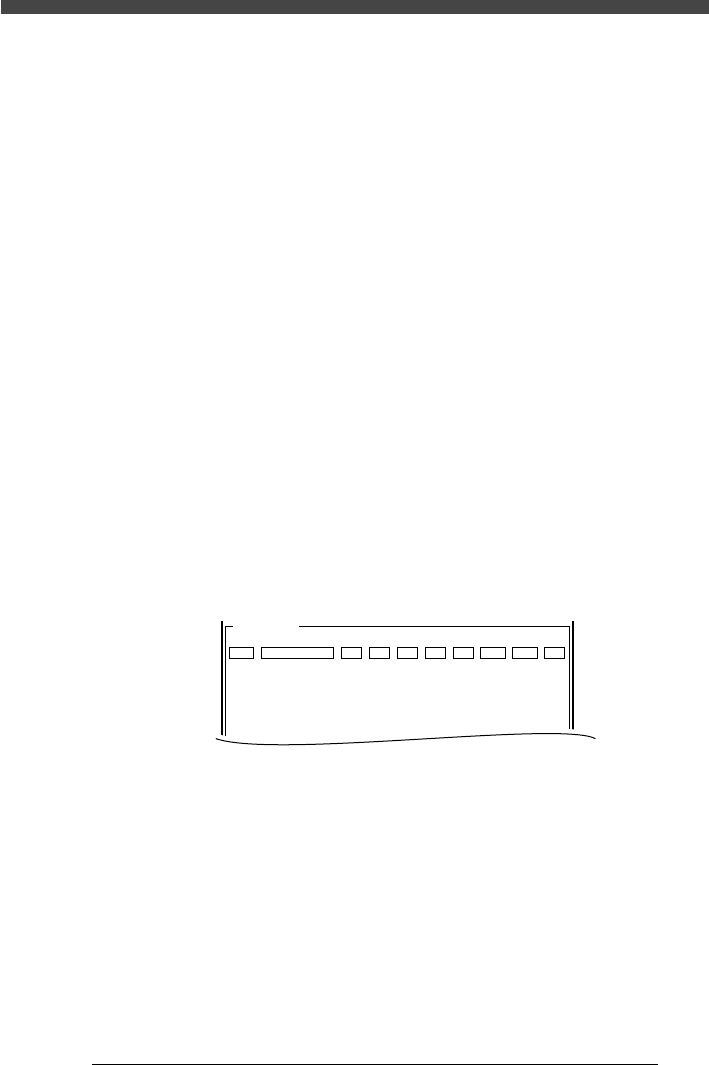
2.「OFFSET」を使う場合
「OFFSET」で搭載するための準備は、使用する基板データ(搭載情報)以外は
「ADJUST_CHIP」の場合と同じです。「ADJUST_CHIP」の部品情報をその
まま使用できます。下図の搭載情報に示すように、「OFFSET」ではヘッド1 と
2 で交互にチップ部品を0 度搭載します。(基板データに「OFFSET」がない場
合は、同じような搭載プログラムを作成してください。)
■「OFFSET」搭載情報
60443755-00
No.
3216
ランドパターン名称
実行
実行
実行
実行
実行
実行
実行
バッド
0
0
0
0
0
0
0
0
0
0
0
0
1
2
1
2
1
2
0.00
0.00
0.00
0.00
0.00
0.00
10.00
10.00
10.00
10.00
10.00
10.00
10.00
13.50
17.00
20.50
24.00
27.50
11
11
11
11
11
11
1
2
3
4
5
6
ヘッド
RYX部品
基板:OFFSET
編集:搭載情報
フィデュ
3-
162
SER04989020
調整
第
3
章
7
7.3.2 搭載実行:「ADJUST_CHIP」
準備が完了したら、まず「ADJUST_CHIP」を使って、ヘッド 1 で部品を試搭
載します。ヘッド1 での調整が済んだら、ヘッド 2 での部品搭載をします。
1
安全を確認して、非常停止を解除します。
非常停止ボタンを回転解除し、YPU の[READY]ボタンを押してください。
e
2
自動運転での基板を指定します。
「1/1/D3 生産基板切替」を選択実行して、基板名「ADJUST_CHIP」を指定
してください。(最初の基板選択では、途中のコマンドは省略されます。)
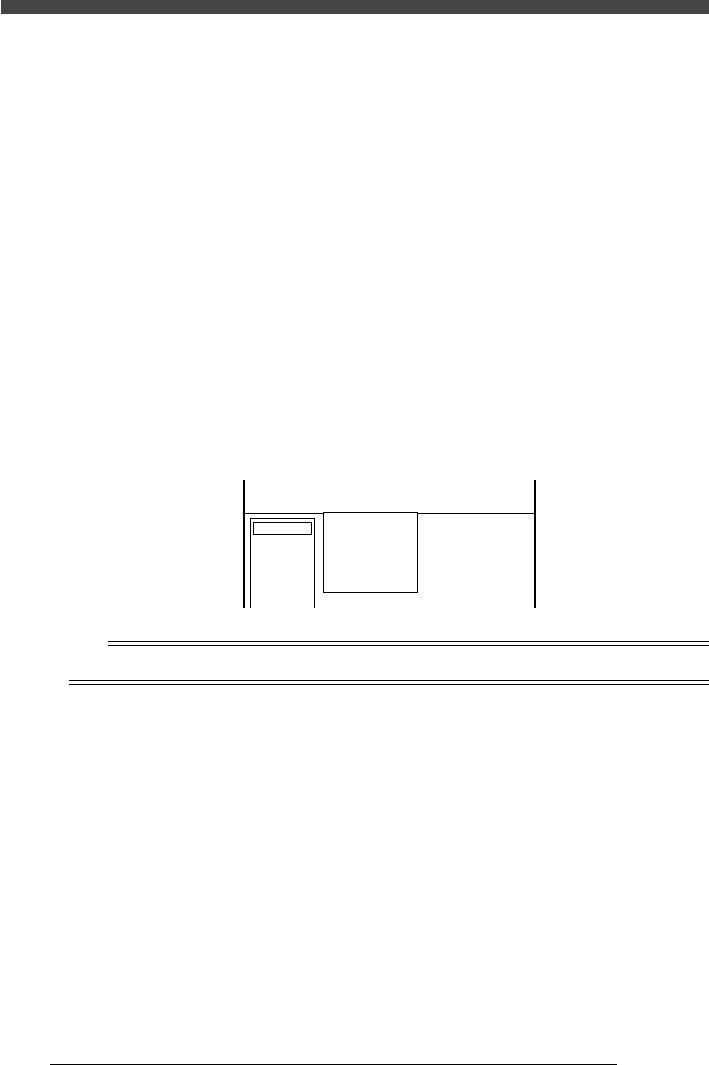
3
自動運転で基板に部品を実装します。
「A/ 運転コマンド」→「A2 自動運転」を選択実行してください。
g
60443714-00
<<モード>> 1/自動運転
A/運転コマンド
A2 自動運転 (RUN)
運転モニター
自動運転中
<コマンドリスト>
n
要点
搭載するヘッドを変更する場合は、「2/1/C1 補助編集」の「一括置換」を利用すると便利です。
3-
163
SER04989020
調整
第
3
章
7
7.3.3 搭載フィードバック:「ADJUST_CHIP」
部品を搭載したら実装状態を評価し、その結果に基づいて「搭載フィードバッ
ク」ユーティリティで微調整します。
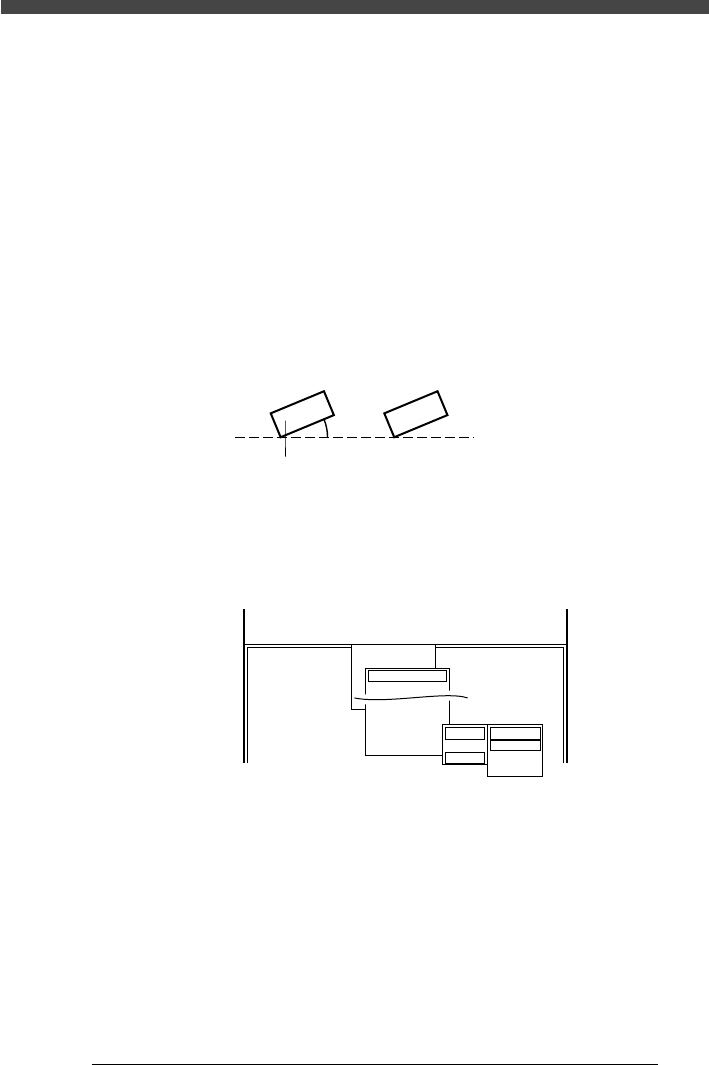
1
最初に、R 方向のズレ量を調べます。
0 度で搭載した部品の傾き角度θを求めてください。
目視では実装状態の評価が難しい場合、拡大鏡を使うか、基板をコンベアに固
定して移動カメラで映像を観察してください。
反時計回りに傾いている場合:+ 値の傾き
時計回りに傾いている場合 :- 値の傾き
■ R 方向ズレ
20443756-00
θ
部品
理想的な搭載位置
0°搭載
180°搭載
2
「搭載フィードバック」を実行します。
1.「3/3/B1 調整項目選択」→「搭載フィードバック」を選択します。
2.「レーザー」→「全体の傾き」を選択します。
60443757-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファイル操作
B1 調整項目選択
調整・検索対象
搭載フィードバック
認識装置
ビジョン
レーザー
調整対象
全体の傾き
X,Y位置ずれ
角度の補正