SER04989020_YVL88II Service_J.pdf - 第187页
3- 166 SER04989020 調整 第 3 章 7 w 搭載角度「0 : 180 度 」 を確認し、 [ENTER] キーを押します。 この調整では、0 度と 1 8 0 度で部品搭載していますので、そのまま [ENTER ] キーを押してください。 e ズレ量を入力し、 [ENTER] キーを押します。 Step 8 の評価結果より、0 度・ 1 8 0 度搭載の「X と Y 方向」にズレ量を入力 してください。 604437…
3-
165
SER04989020
調整
第
3
章
7
8
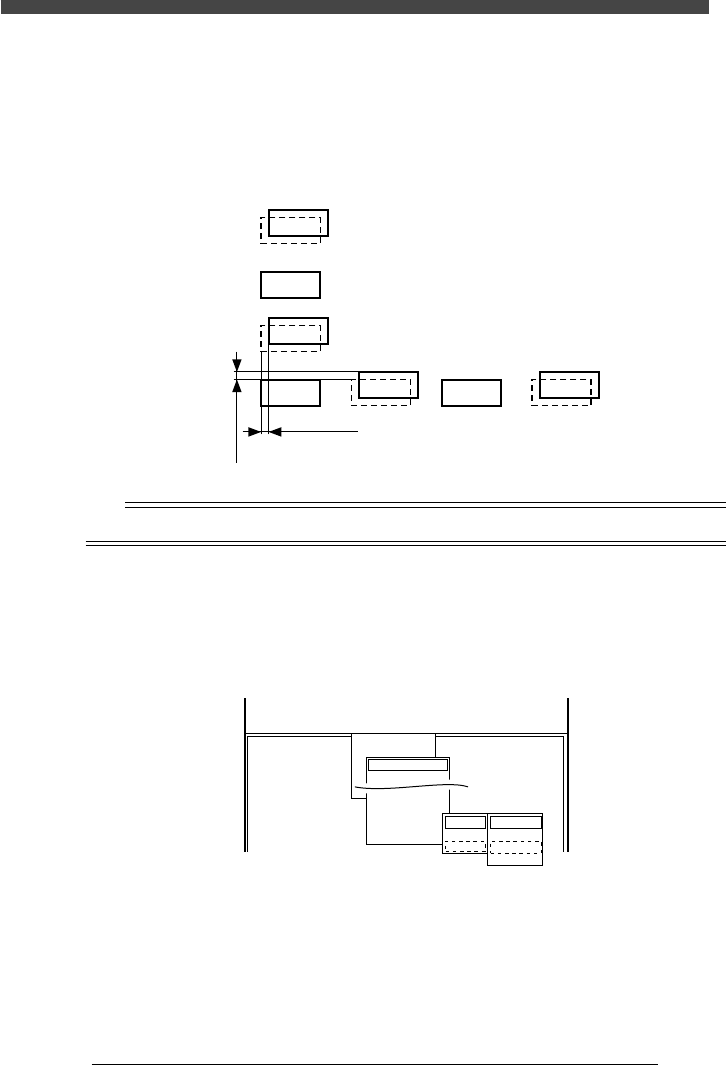
次に、XY 方向のズレ量を評価します。
0 度と180 度で搭載した部品どうしの位置ズレ量を調べてください。
目視での評価が難しい場合は、拡大鏡を使うか、基板をコンベアに固定して移
動カメラで映像を観察してください。
■ XY 方向ズレ量
20443759-00
180°
180°
Y方向のズレ
X方向のズレ
0°搭載
180°搭載
0°
180°
0°
n
要点
ズレ量は部品のサイズを基準にして求めてください。
9
「搭載フィードバック」を実行します。
今度は、「搭載フィードバック」→「レーザー」→「X,Y 位置ずれ」を選択し
てください。
60443760-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファイル操作
B1 調整項目選択
調整・検索対象
搭載フィードバック
認識装置
ビジョン
レーザー
調整対象
全体の傾き
X,Y位置ずれ
角度の補正
0
[ENTER]キーを押して、次のステップに進みます。
調整を中止したい場合は、[ESC]キーを押してください。
q
ヘッド番号を入力し、[ENTER]キーを押します。
部品搭載に使用したヘッド1 を入力してください。
3-
166
SER04989020
調整
第
3
章
7
w
搭載角度「0: 180 度」を確認し、[ENTER]キーを押します。
この調整では、0 度と 180 度で部品搭載していますので、そのまま[ENTER
]
キーを押してください。
e
ズレ量を入力し、[ENTER]キーを押します。
Step 8 の評価結果より、0 度・180 度搭載の「X とY 方向」にズレ量を入力
してください。
60443761-00
<<モード>> 3/マシン調整
A573
レーザー認識で搭載した部品のX,Y位置ずれを修正します。
この調整は部品を調整用のテストボード上へ、レーザー認識にて
0度と180度・・・
A581
試実装で部品を吸着したヘッド番号を入力してください。
キー入力終了後、[ENTER]キーを押してください。
[ESC]キーを押せば、調整を途中で止めます。
レーザー
X方向 Y方向 R方向
ヘッド番号 1
A583
試実装で部品を搭載したパターンを選択して下さい。
キー入力終了後、[ENTER]キーを押してください。
[ESC]キーを押せば、調整を途中で止めます。
A586
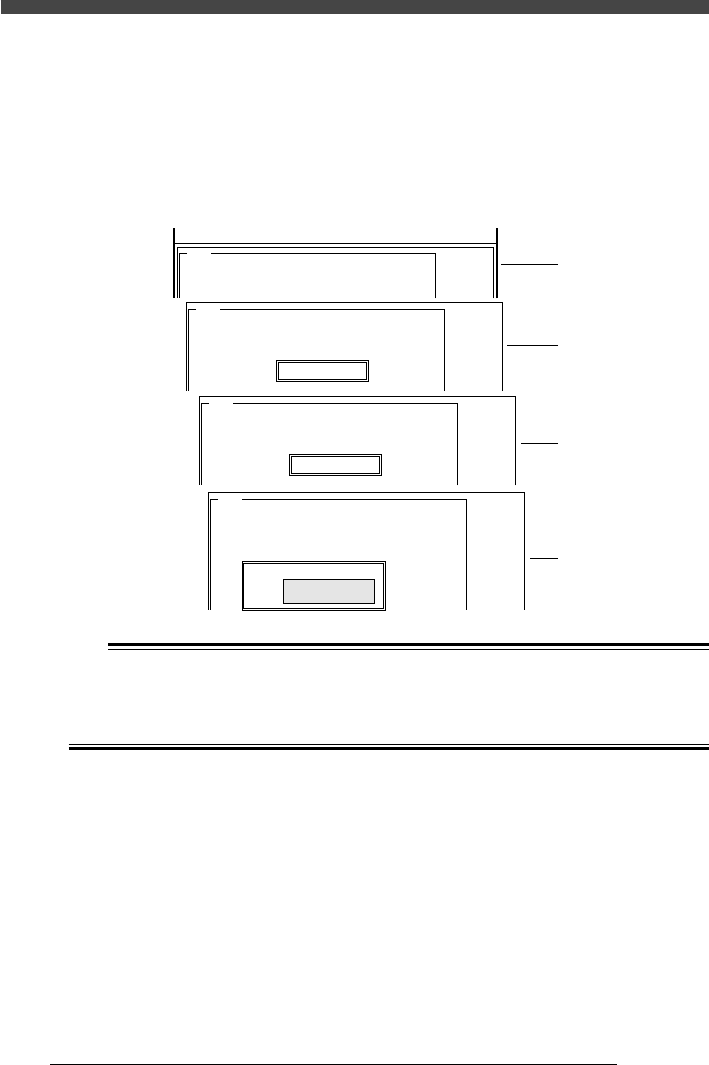
部品のズレ量を、下の編集ウインドウに入力してください。
認識装置: レーザー
実装角度: 0:180度
ヘッド番号: 1
全項目・・・
レーザー
X方向 Y方向 R方向
レーザー
0度
180度
0.00
0.00
0.00
0.00
X方向 Y方向
搭載角度 0:180度
Step 13
Step 12
Step 11
Step 10
c
注意
0度と180度搭載のズレ量を入力するときの値は、STEP 8 で評価した値の1/2ずつとなりますので注
意してください。
また、「XY方向」とも、基板原点側にずれている方にマイナス符号を付けて入力します。(STEP
8 の例では、0度搭載側の「XY方向」がマイナス値となります。)
r
入力した値を確認して、再度 [ENTER]キーを押します。
入力値に基づいて、自動的に補正値が 計算されます。
t
調整結果を保存します。
「B2 調整後データ保存」または「B0 データ保存後終了」を選択実行してくだ
さい。(保存したくない場合は、「B3 調整前データ復活」または「B7 強制終
了」を選択実行してください。)
y
搭載フィードバックによる微調整の効果を確認します。
再び部品搭載を実行して、実装状態を確認してください。
XY 方向のズレ量が 0 になるまで、上記手順を繰り返してください。
3-
167
SER04989020
調整
第
3
章
7
u
ヘッド1 の調整が完了したら、ヘッド 2 で部品搭載します。
「ADJUST_CHIP」の搭載情報でヘッド 2 を指定してから、部品を搭載してく
ださい。
i
ヘッド2 の 搭載ズレ量を調べます。
ヘッド1 と同様に、まずR 方向のズレ(傾き角度)を確認してください。
もし、ヘッド2 での搭載結果に R 方向のズレが生じている場合は、Step 19
へ進んでください。R 方向のズレがなければ、Step 19∼25は省いて、Step
26 へ移ってください。
o
「搭載フィードバック」を実行します。
R 方向のズレを補正するため、「搭載フィードバック」→「レーザー」→「角
度の補正」を選択してください。
60443762-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファイル操作
B1 調整項目選択
調整・検索対象
搭載フィードバック
認識装置
ビジョン
レーザー
調整対象
全体の傾き
X,Y位置ずれ
角度の補正
p
[ENTER]キーを押して、次のステップに進みます。
調整を中止したい場合は、[ESC]キーを押してください。
ヘッド番号「2」を入力し、[ENTER]キーを押します。
ここでは、ヘッド2 だけの角度補正をしますので、ヘッド1 を選択しないで
ください。もし、ヘッド1 を選択すると、ビジョン認識で角度補正した値に影
響します。
傾き角度を入力し、[ENTER]キーを押します。
Step 18 の評価結果より、「0 度・180 度」にそれぞれの傾き角度を入力して
ください。(90 度・-90 度では搭載していませんので入力しません。)
60443763-00
<<モード>> 3/マシン調整
A581
試実装で部品を吸着したベット番号をを・・・
A588
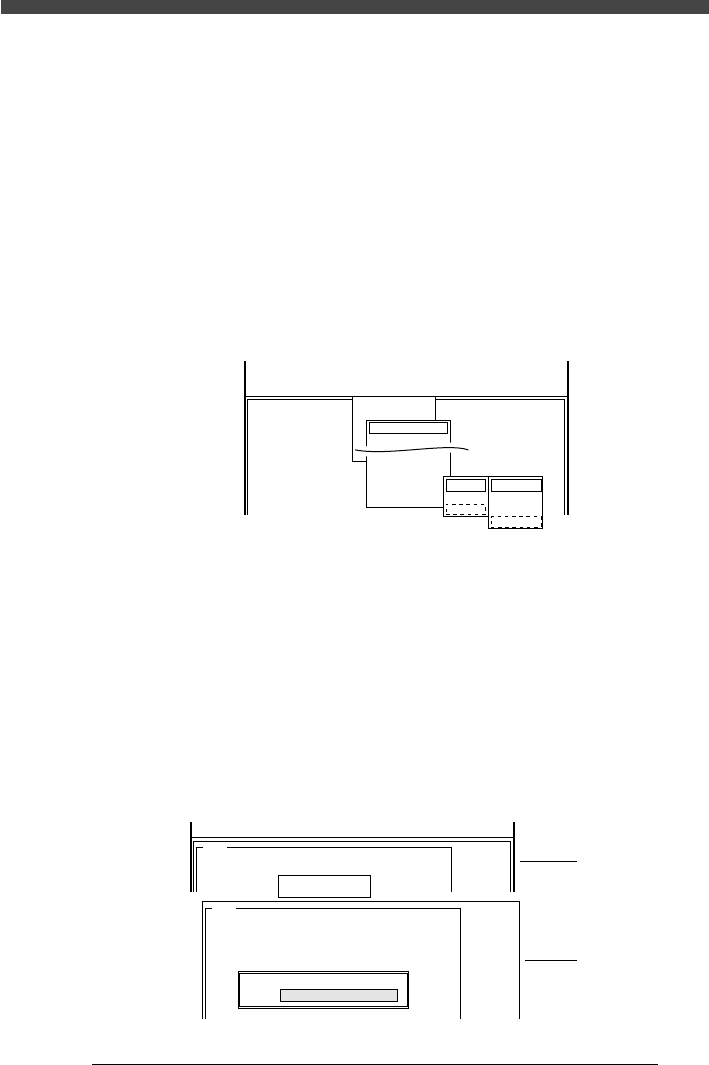
角度補正量を、下の編集ウインドウに入力してください。
認識装置
ヘッド番号
角度は・・・
ヘッド番号 2
:
:
レーザー
2
レーザー
補正量
0.00 0.00 0.00
0度180度 -90度
0.00
90度
Step 22
Step 21