SER04989020_YVL88II Service_J.pdf - 第39页
3- 18 SER04989020 調整 第 3 章 1 4 カーソルを「ロケートピン規準」の「X 」に合わせます。 60443114-00 対象名 X 機械座標 ビームセンサー FINE角度 リード浮き検出 1 リード浮き検出 2 ロケートピン基準 基板外形基準 待機位置 YZ 編集中 0.00 -5.00 0.00 0.00 0.00 194.63 194.63…
3-
17
SER04989020
調整
第
3
章
1
1.2.1 FINE角度
シングル認識カメラでFINE モード認識を行う際に、角度の収束範囲を指定し
ます。0.01 から0.04まで4段階に設定できます。調整は最小の 0.01で行い、
実際の使用は0.02 ∼0.04 に設定します。[INS] [DEL] [スペース]キーを押す
と、設定が切り替わります。
60443113-00
対象名
X
機械座標
ビームセンサー
FINE角度
リード浮き検出 1
リード浮き検出 2
ロケートピン基準
基板外形基準
待機位置
廃位
YZ
編集中
0.00
-5.00
0.00
0.00
0.00
194.63
194.63
400.00
0.00
0.00
0.00
161.26
161.26
400.00
R
フィーダー
0.00
0.00
0.00
種類
0.02
通常
編集対象
n
要点
「FINE角度」機能は、オプション構成の「多段階認識」が「標準」か「位置補正付き」に設定され
ているときだけ有効です。より小さな角度を指定すると角度精度は向上しますが、収束せずに部品
を廃却したり、収束までに時間がかかりサイクルタイムに影響する場合があります。
1.2.2 ロケートピン基準
基板を搭載位置へ固定するときの基準位置となる座標です。移動カメラを使って
固定ロケートピンの中心をティーチングします。
1
ロケートピンを上昇させます。
1.「3/4/C1 出力モニター」を選択実行します。
2. カーソルを「TN03」(ロケートピン 1)に合わせ、[ENTER]キーを押しま
す。
「TN03」の出力表示は、ロケートピンが上昇すると "1" に変化します。
2
マシン調整モードに入り、「3/3/B4 ティーチング実行条件」
を指定します。
ティーチングユニットは「カメラ」、運転速度は「どれを選択してもかまいま
せん。
参考
マシン調整モードでティーチング実行条件を指定する場合、運転速度はどれを選択しても、安全の
ため最初は最低速度(SPEED 5=20)に設定されます。速度を変更するには、ティーチング実行条
件を指定した後、YPUの[SPEED]キーを押してください。
3
機械座標画面を開きます。
「3/3/B1 調整項目選択」→「機械座標」を選択実行してください。
3-
18
SER04989020
調整
第
3
章
1
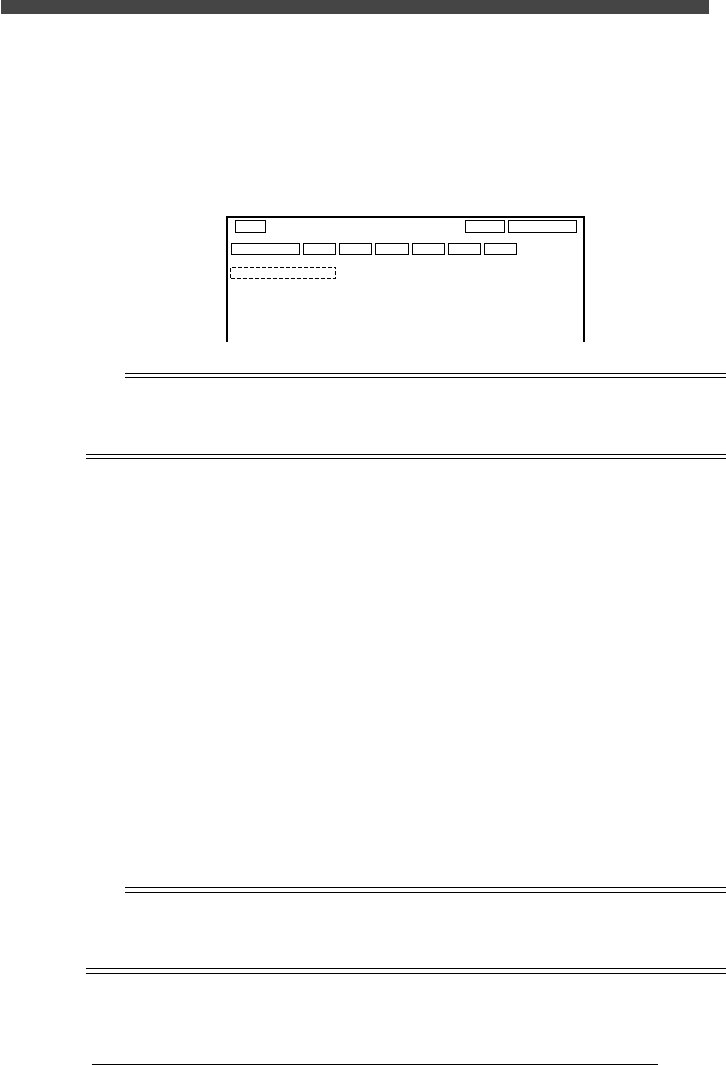
4
カーソルを「ロケートピン規準」の「X」に合わせます。
60443114-00
対象名
X
機械座標
ビームセンサー
FINE角度
リード浮き検出 1
リード浮き検出 2
ロケートピン基準
基板外形基準
待機位置
YZ
編集中
0.00
-5.00
0.00
0.00
0.00
194.63
194.63
400.00
0.00
0.00
0.00
161.26
161.26
400.00
R
フィーダー
0.00
0.00
0.00
種類
0.02
通常
編集対象
5
ロケートピンの中心と移動カメラを合わせます。
YPU のジョイスティックを操作して、固定ロケートピンの中心をビジョン
ディスプレイのセンターカーソルに合わせてください。
ヘッド部を微少移動させるときは、YPU の[SPEED]キーを押して低速度を選
択するか、ジョイスティックを移動方向にわずかに傾けるとよいでしょう。
d
6
ティーチングを実行します。
1. [F10]キーを2回押して、X 座標を入力します。
2. 次にカーソルを「ロケートピン規準」の「Y」に合わせます。
3. [F10]キーを2回押して、Y 座標を入力します。
0
7
ティーチングしたデータを保存します。
[ESC]キーを押してから、「B2 調整後データ保存」または「B0 データ保存後
終了」を選択実行してください。(保存したくない場合は、「B3 調整前データ
復活」または「B7 強制終了」を選択実行してください。)
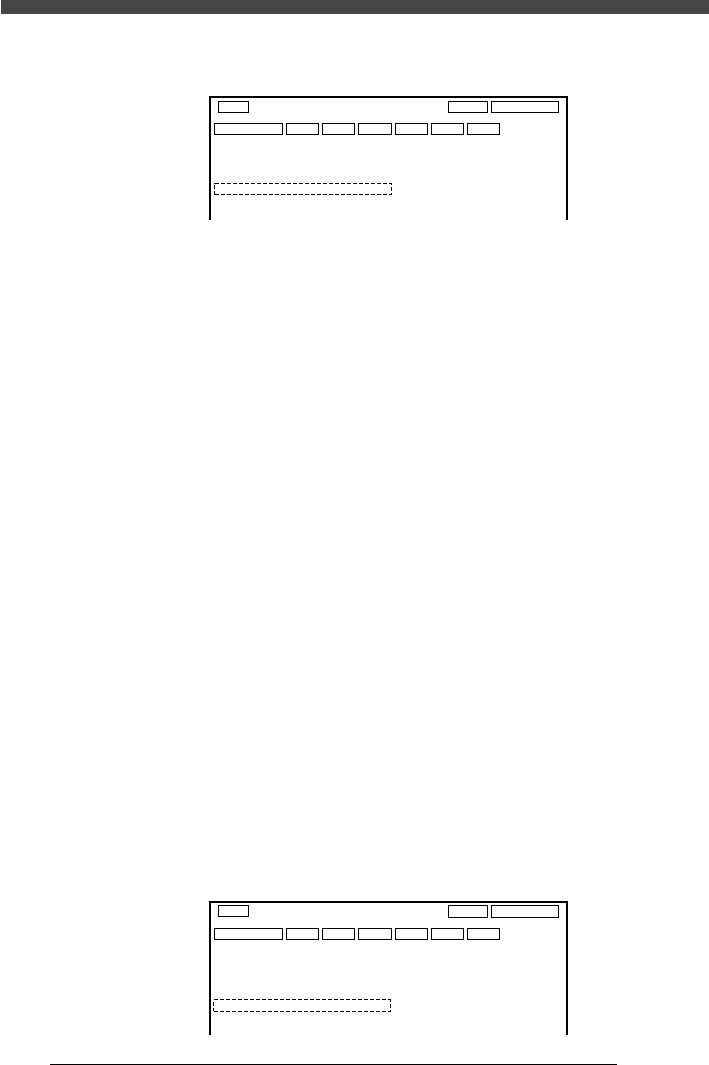
1.2.3 基板外形基準
基板固定方法を「基板外形基準」にしたときに、ロケートピン基準と比べて位置
がずれることがあります。このズレを求めて、ロケートピンから引いた値をここ
に入力します。通常は「ロケートピン基準」と同じ値を入力しておきます。
60443115-00
対象名
X
機械座標
ビームセンサー
FINE角度
リード浮き検出 1
リード浮き検出 2
ロケートピン基準
基板外形基準
待機位置
廃棄位置
YZ
編集中
0.00
-5.00
30.00
0.00
0.00
0.00
194.63
194.63
400.00
250.21
0.00
0.00
0.00
161.26
161.26
400.00
79.85
R
フィーダー
0.00
0.00
0.00
50
種類
0.02
通常
300
編集対象
3-
19
SER04989020
調整
第
3
章
1
1.2.4 待機位置
「待機位置」のXY 座標は基板搬送時にヘッドが待機している位置で、出荷時に
標準的な待機位置が入力されています。Z 座標値はバックライト照明移動時のノ
ズルの高さです。(この値は変更しないでください。)R 座標値はヘッドの角度
で、R 軸初期位置(6.4.2 参照)と同じ値を入力します。
「種類」欄は、ノズルにゴミや半田などが詰まるのを防ぐために、ノズル内のエ
アブローを行うかどうかを設定します。詳しくは次頁「1.2.5 廃棄位置」をご覧
ください。
「待機位置」のXY 座標値を変更するときは、下記の手順でティーチングしてく
ださい。
1
「3/3/B4 ティーチング実行条件」を指定します。
ティーチングユニットは「ヘッド1」または「ヘッド2」、運転速度はどれを
選択してもかまいません。
参考
マシン調整モードでティーチング実行条件を指定する場合、運転速度はどれを選択しても、安全の
ため最低速度に設定されます。速度を変更するには、ティーチング実行条件を指定した後、YPUの
[SPEED]キーを押してください。
2
機械座標画面を開きます。
「3/3/B1 調整項目選択」→「機械座標」を選択実行してください。
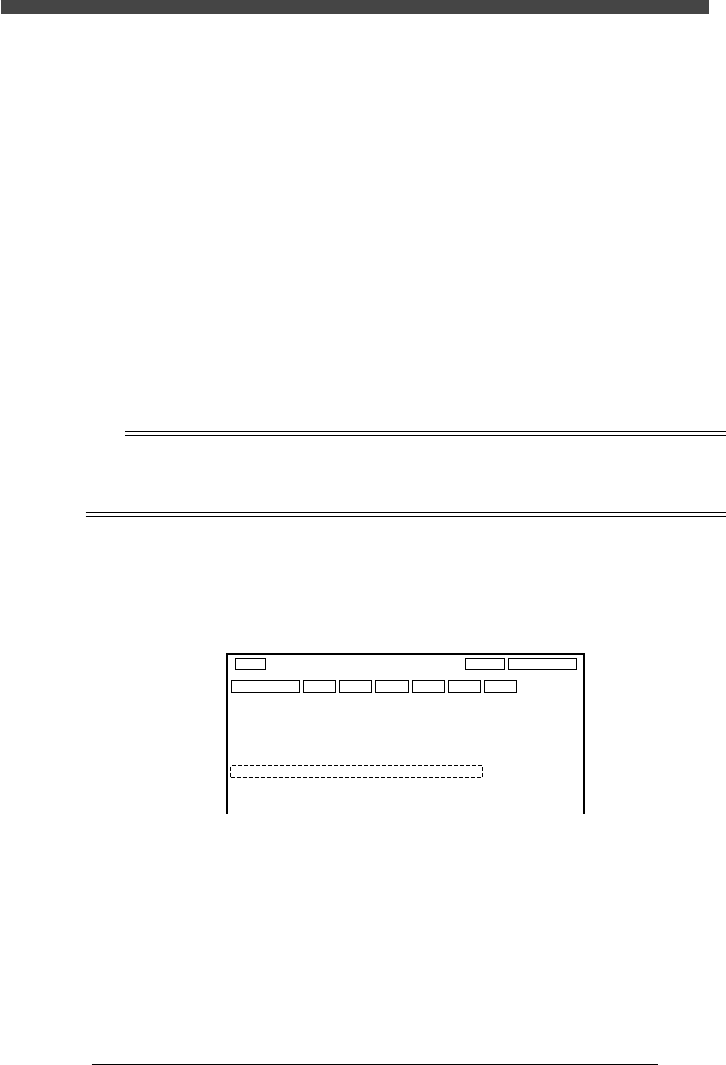
3
カーソルを「待機位置」の「X」に合わせます。
60443116-00
対象名
X
機械座標
ビームセンサー
FINE角度
リード浮き検出 1
リード浮き検出 2
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
リファレンスマーカー高さ
YZ
編集中
0.00
-5.00
30.00
52.27
0.00
0.00
0.00
0.00
194.63
194.63
400.00
250.21
0.00
0.00
0.00
161.26
161.26
400.00
79.85
R
フィーダー
0.00
0.00
0.00
52.27
50
種類
0.02
通常
300
編集対象
4
ヘッド部を希望する待機位置へ移動させます。
YPU のジョイステックを操作して、ヘッド部を希望する待機位置へ移動させ
てください。このとき、ヘッド部が基板センサーに感知されていないことを確
認してください。(基板センサーのLED が点灯していれば、ヘッド部は感知さ
れていません。)
d