YSH20_Ope_E.pdf - 第54页
1-18 1 Part names and functions 6.2 Conveyor sensor positions T he position of each board sensor on the convey or is shown below . Board sensor position Direction of board flow Direction of board flow Board detection at …
1-17
1
Part names and functions
6.
Conveyor unit
6.1
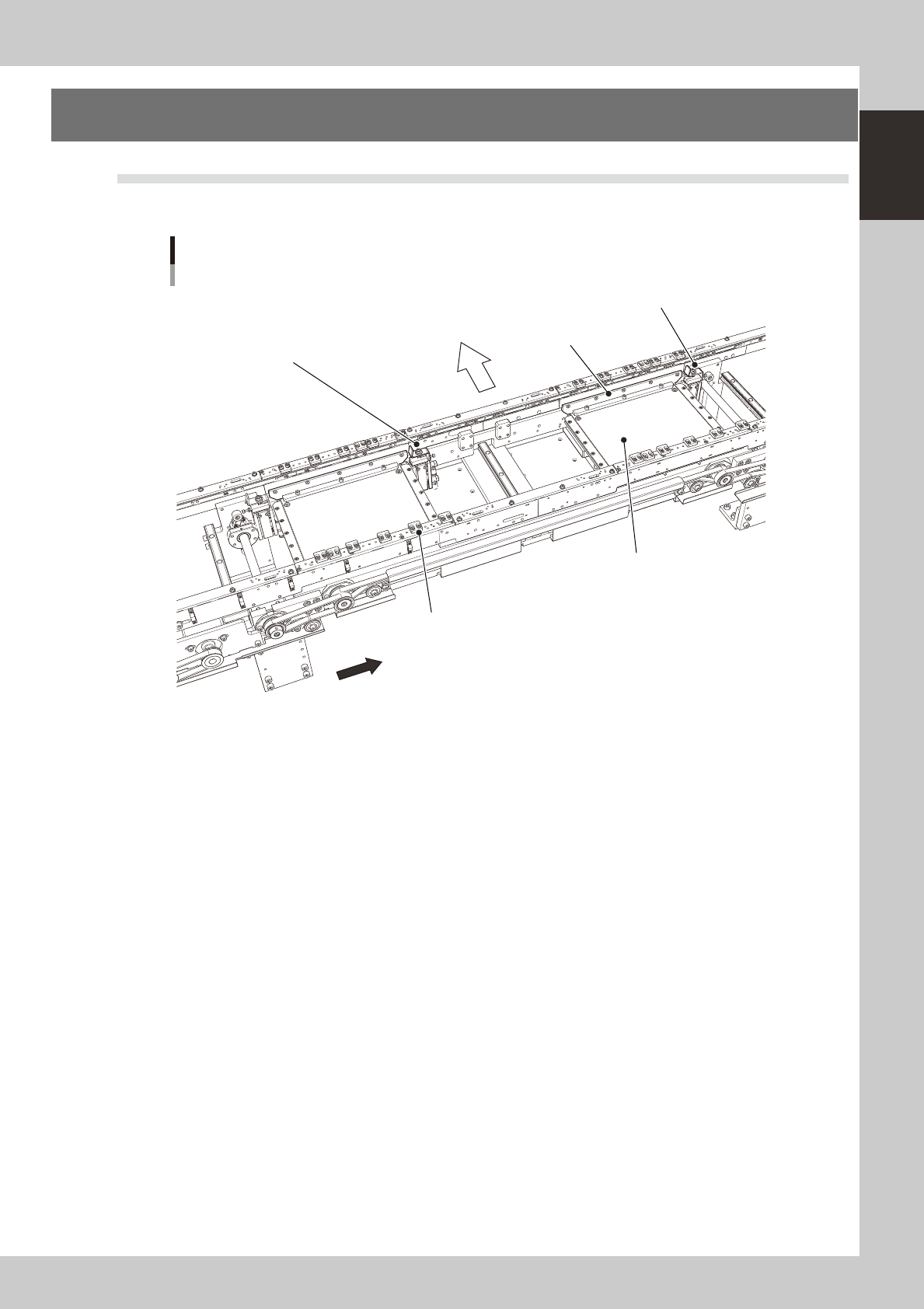
Conveyor unit
The conveyor unit used to clamp a board in mounting position is described below.
Conveyor unit
A-table main stopper
Front of machine
Direction of board flow
Push-up plate
Board hold plate (movable)
B-table main stopper
Clamp unit
23121-H0-00
• Main stopper
When a board is carried in on the conveyor, the main stopper halts travel of the board in the component mounting
position.
• Push-up plate
Clamps the board up against the board hold plates in conjunction with the clamp unit.
• Board hold plate (movable)
These plates hold the edges of the board from above when the board is clamped.
• Clamp unit
This moves up with the push-up plate and clamps the board by pushing it up against the board hold plates.
1-18
1
Part names and functions
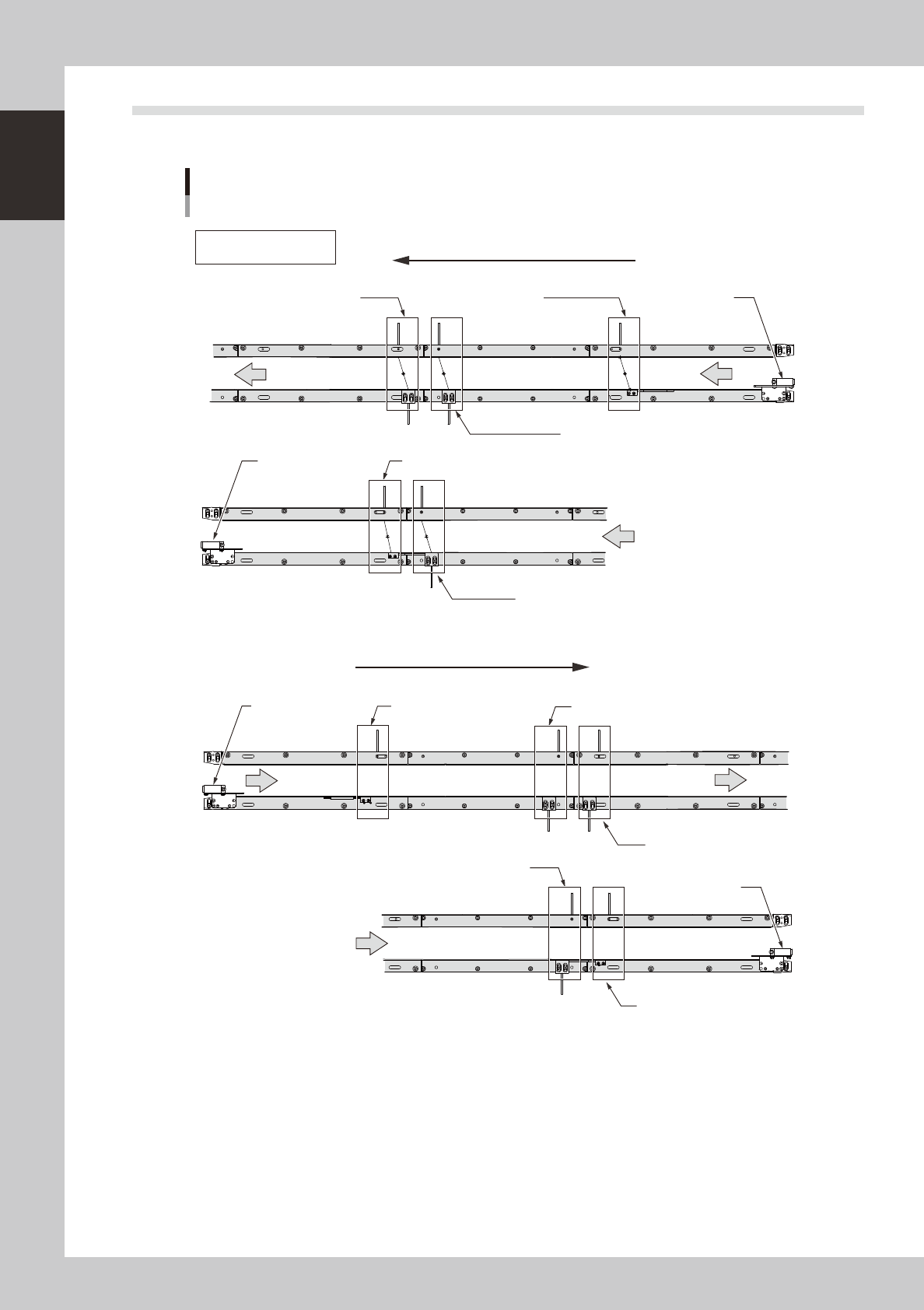
6.2 Conveyor sensor positions
The position of each board sensor on the conveyor is shown below.
Board sensor position
Direction of board flow
Direction of board flow
Board detection at entrance
[N 0100404]
Board detection at entrance
[N 01003F3]
Board detection at standby position
[N 0100405]
Board detection at standby position
[N 01003F1]
Board detection at stage A exit
[N 0100411]
Upper row: Sensor function
Lower row: [Address]
Board detection at stage A exit
[N 0100405]
Board detection at exit
[N 01003F3]
Board detection at exit
[N 0100404]
Board detection at stage B board clamp position
[N01003F2]
Board detection at stage B board clamp position
[N01003F2]
Board detection at stage A board clamp position
[N0100406]
Board detection at stage A board clamp position
[N0100406]
Board detection at stage B exit
[N 01003F1]
Board detection at stage B exit
[N 01003F5]
23122-H0-00
1-19
1
Part names and functions
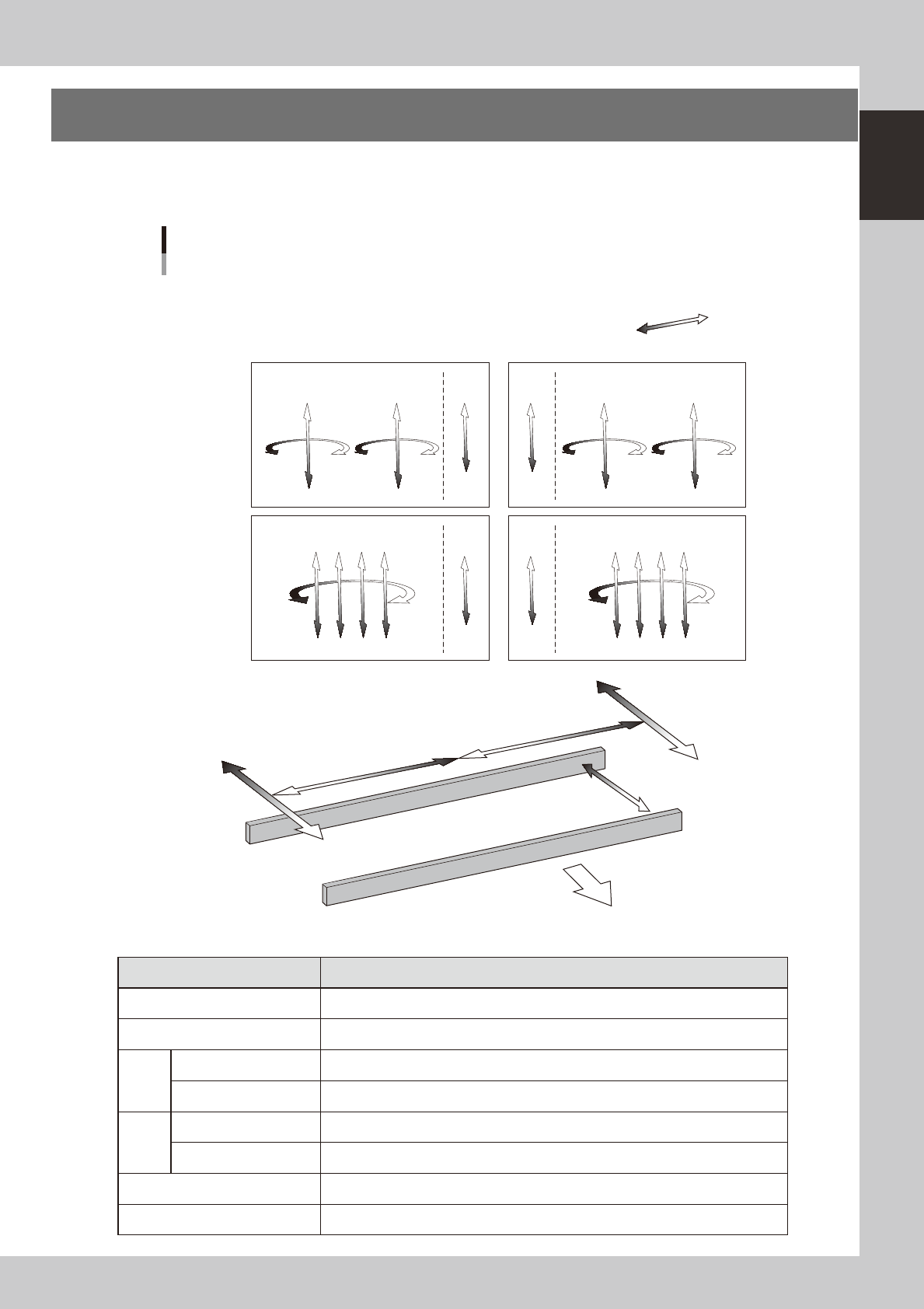
7. Axis configuration
The servomotor-controlled axis configuration and operating directions of this machine and wafer tray change
are described below.
n
Axis configuration of this machine
Plus direction
Minus direction
W1 axis
Axis configuration
Right-to-left board flow
RB2 axis
RB1 axis
N Head unit
N Main axes, Conveyor
A-table head unit
B-table head unit
FF head
4M head
ZB1
ZB2
RA2 axis
RA1 axis
ZA1
ZA2
CZB axis CZA axis
RB1 axis
ZB1 ZB2 ZB3 ZB4
RA1 axis
ZA1 ZA2 ZA3 ZA4
CZB axis CZA axis
YB axis
YA axis
XA axis
XB axis
Front of machine
23123-H0-10
n
Function of each axis
Axis Function
XA, XB Moves the head unit above the table in parallel with the board flow on the conveyor.
YA, YB Moves the head unit perpendicular to the board flow on the conveyor.
FF
RA1, RA2, RB1, RB2 Turns the nozzle shaft of each head.
ZA1, ZA2, ZB1, ZB2 Moves the component pick-and-place head of each head vertically.
4M
RA1, RB1, Turns the nozzle shafts (4 shafts) for each table simultaneously.
ZA1 to ZA4, ZB1 to ZB4 Moves the component pick-and-place head of each head vertically.
W1 Changes the conveyor width.
CZA, CZB Moves the fiducial camera unit vertically.