KE 2050 2060说明书.pdf - 第212页
第4章 生产程序制作 Rev00 4-3-7-2-3 引脚的长度 下、右、上、左 输入引脚的长度。有下、右、上、左的输入位置,根据元件种类决定需要的输入位置。对于Q FP,由于4个方向长度相同,只需输入1处(长度下)。(显示 *标记的项目不需要输入。) 引脚长度 引脚长度 输入用 VCS 识别的长度值。 当为 QFJ 时, 由于直到模板内侧(元件底部) 都有引脚, 因 此可输入比从上面看的长度稍大些的值。 图像数据中的 “下、 右、 上…
第4章 生产程序制作 Rev00
4-3-7-2 设置项目
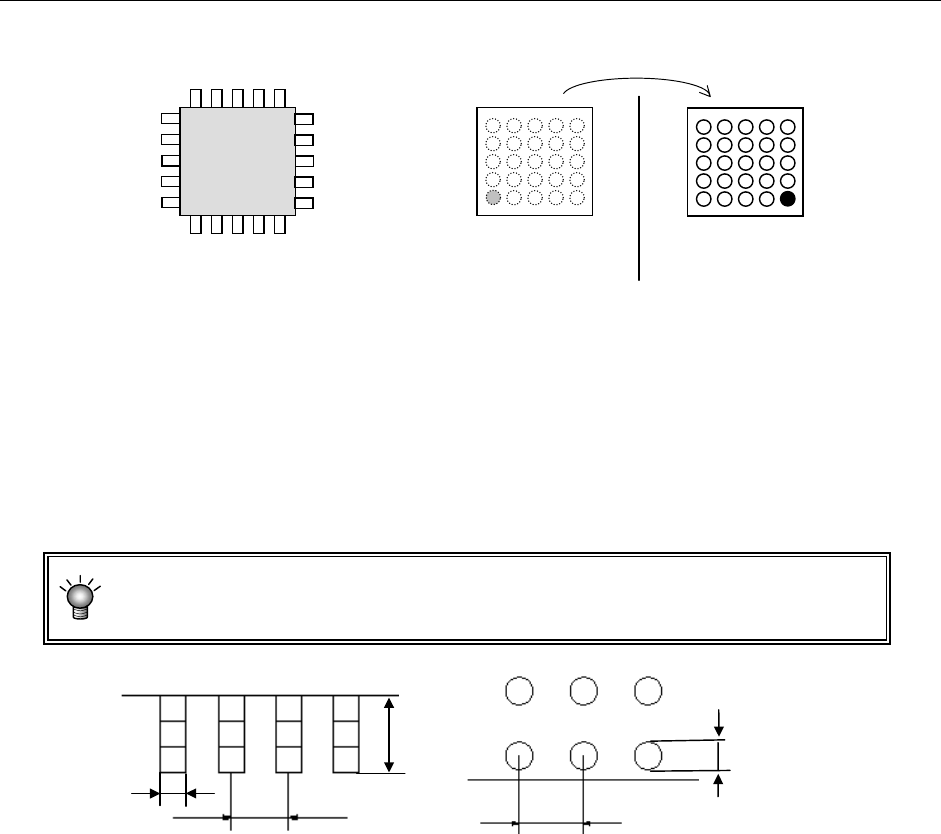
QFP、连接器等的引脚元件采用俯视图,BGA等球形元件采用仰视图来制作。
仰视图
俯视图
<QFP(俯视图)> <BGA>
4-3-7-2-1 “ 元件名” 、“ 元件种类” 、“ 元件尺寸(横、纵)”
显示“元件数据”中已输入的值。变更时,请用“元件数据”进行。
4-3-7-2-2 间距(X、Y)
输入引脚间或球面间(从引脚或球面中心到下一个引脚或球面中心)的距离。
请正确输入“间距”值。“外形尺寸”、“引脚长度”等虽然有一定的盈余,但对于“间
距”来说,即使有 10
µm(0.01mm)的误差也可能会发生识别错误。
长度
宽度
宽度
间距
间距
4-67
第4章 生产程序制作 Rev00
4-3-7-2-3 引脚的长度 下、右、上、左
输入引脚的长度。有下、右、上、左的输入位置,根据元件种类决定需要的输入位置。对于Q
FP,由于4个方向长度相同,只需输入1处(长度下)。(显示*标记的项目不需要输入。)
引脚长度
引脚长度
输入用 VCS 识别的长度值。当为 QFJ 时,由于直到模板内侧(元件底部) 都有引脚,因
此可输入比从上面看的长度稍大些的值。
图像数据中的“下、右、上、左以
本装置中所定义的 0 度的贴片方
向为基准来表示。”
4-3-7-2-4 宽度
输入引脚宽度或球的直径。
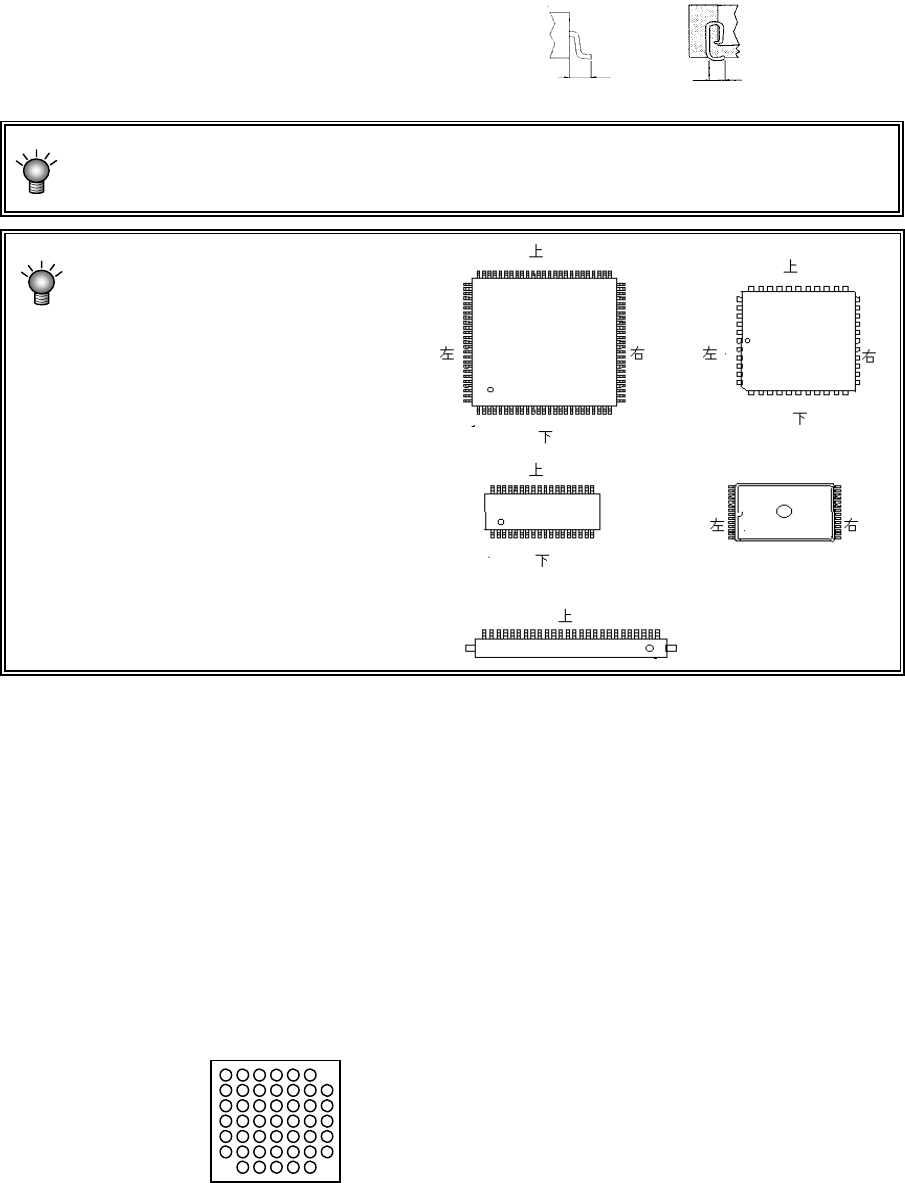
4-3-7-2-5 下、右、上、左
输入各个方向的引脚数或球数。
即使为缺球的BGA,也请输入假定无欠缺状态时的数目。
关于球欠缺部位,在下一页“7) 欠缺开始/欠缺数”画面中输入。
当为如下图的BGA时、下、右、上、左都输入“7”。
仰视图
4-68
第4章 生产程序制作 Rev00
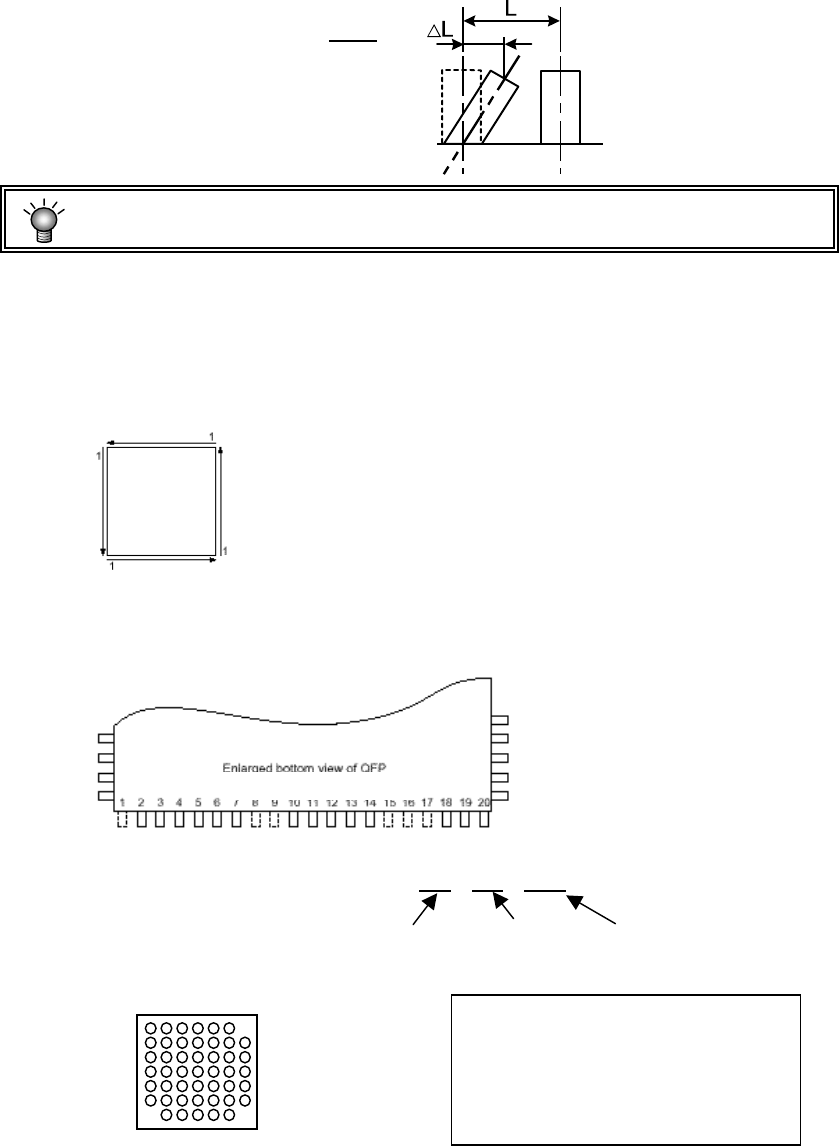
4-3-7-2-6 弯曲
为了检查引脚水平方向的弯曲,设置检测水平值。该值是相对于引脚间距的引脚弯曲率。通
常请设置为20%~30%。
若缩小判定值,检查将变得严格。
ΔL
L
引脚弯曲检测水平
另外,用可选的共面性功能来检查引脚的垂直方向(引脚悬浮检查)。
4-3-7-2-7 欠缺开始/欠缺数
引脚或球有欠缺时,输入其信息。
欠缺信息可分别在4个方向上设置,1个方向最大可设置3处,
各个面上计算引脚的方向如下图所示。
例) 下图的QFP和BGA欠缺信息按如下方式输入。
● QFP
⇒ 在下底面的引脚欠缺信息中输入“1/1
、8/2、15/3”。
1 针开始 1 根 8 针开始 2 根 15 针开始 3 根
● BGA
俯视图
下
左
右
上
仰视图
右
左
下
上
左图是将贴片角度=0 度的元件姿势左
右反转,改变了俯视图和仰视图的图。
图中为“右
”的边,在实际贴片中相当
于“左”,该输入部分,如左图所示输
入为“右球”的欠缺。
⇒ 下底面引脚:“1/1、7/1、0/0”;右面引脚:“1/1、7/1、0/0”
上底面引脚:“1/1、0/0、0/0”;左面引脚:“7/1、0/0、0/0”
4-69