YSi-X_Ope_C.pdf - 第31页
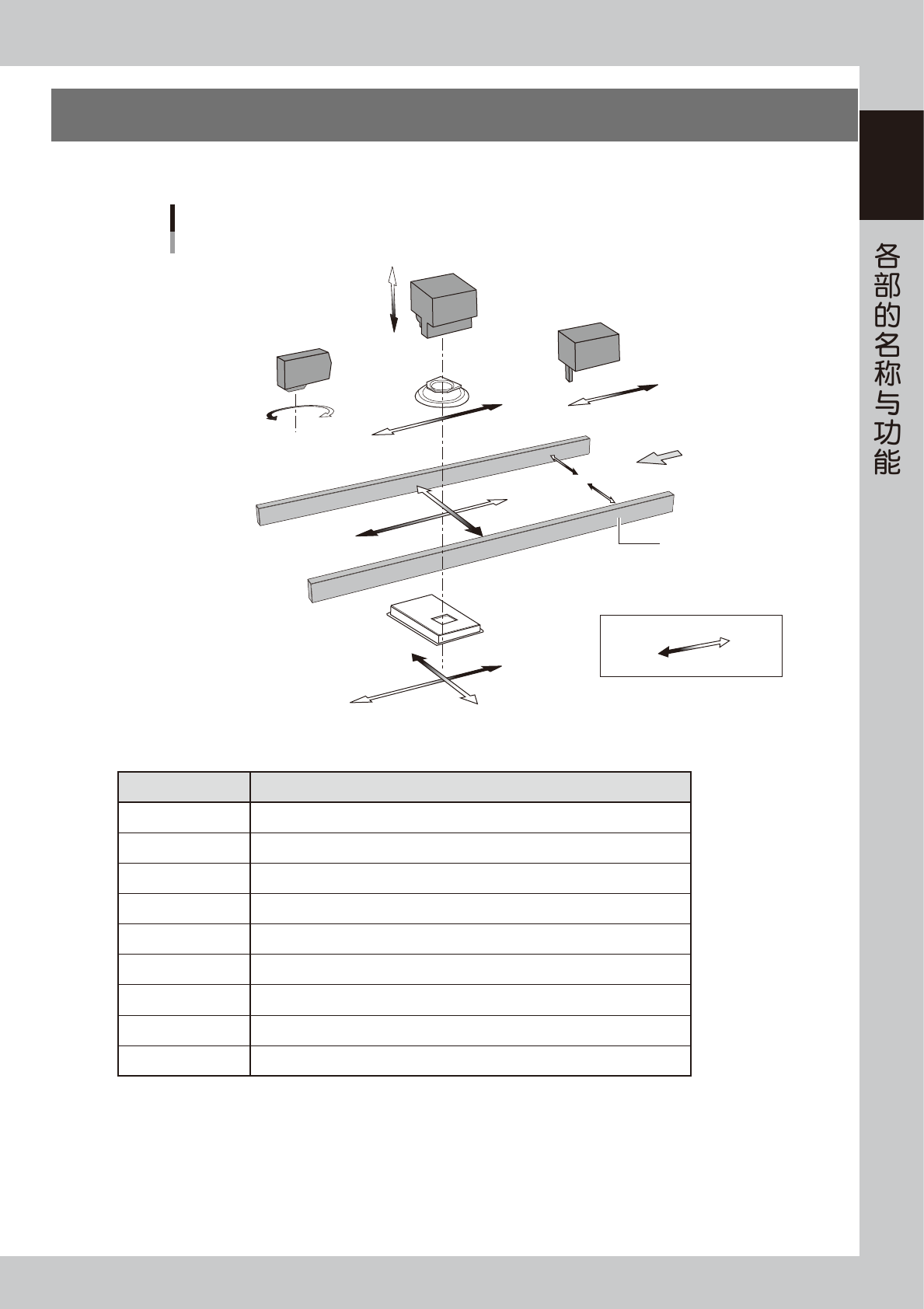
1-7 1 4. 轴的组成 下面,介绍 YSi-X 检查机的伺服电机所控制的轴的组成与轴的运行方向。 YT轴 MS轴 HZ轴 LY轴 LX轴 HS轴 XT轴 正方向 负方向 基板 传送轨 传送工作台 轴的组成 传送方向: 以右→左传送基板为例 W轴 HL轴 X射线源 光学相机 X射线相机 X射线相机工作台 激光高度感应器 挡板单元 25108-M6-00 ■ 各轴的功能 轴名 功能 XT 轴 沿传送基板的方向平行移动传送工作台 (…
1-6
1
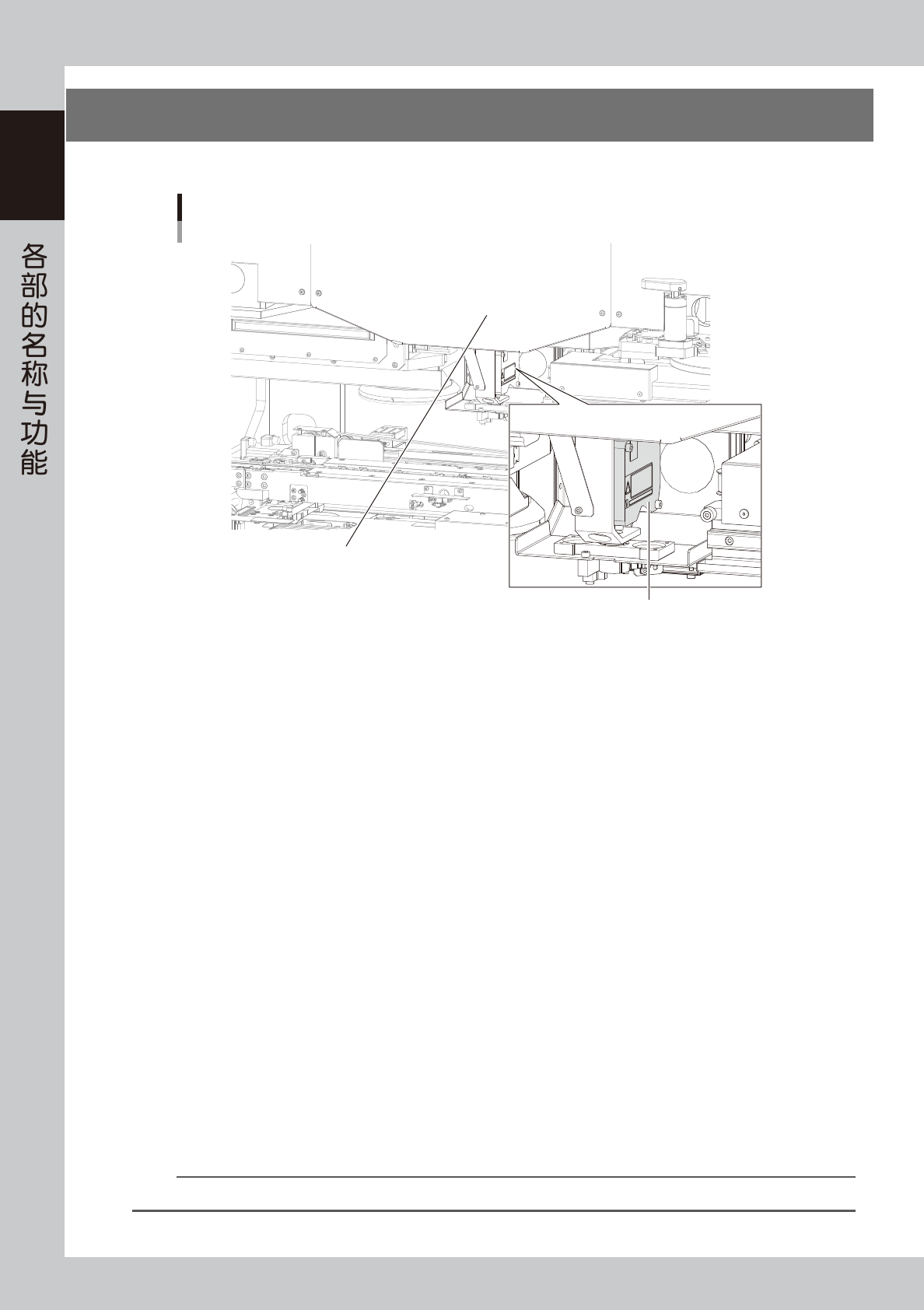
3.激光高度感应器
下面,介绍测定高度用的激光高度感应器。
激光高度感应器
激光高度感应器 (旋转型)
HL轴旋转驱动部 (盖板内部)
25107-M6-00
■
“测定高度”检查项目
“测定高度”检查项目,是 1 种检查高度的方法。它使用激光高度感应器测定检查对象位置的高度,判定是否在用户所设定
的范围以内。在设定范围以内时,判定为 OK ;不在设定范围以内时,判定为 NG。
■ 测定类型
基准
测定基准位置的高度作为基准值。
用“点测定”或“线扫描”测定的值与基准值进行比较,之差即是元件的高度。
点测定
主要进行下列 3 项检查。
•
检查翘件
测定元件的高度,可以检查用光学难以检出的翘件与有无元件。
•
检查 BGA 翘起
测定 BGA 的高度,可以检出 BGA 翘起或底部因夹入元件等造成的虚焊。
•
检查极性
测定凹形极性标记的高度,可以检查用光学难以检出的极性相反。
线扫描
测定引脚的高度,可以检出 QFP、SOP 等引脚元件是否有翘脚。
■ 基板的挠曲补偿
进行 X 射线检查时,可以用激光高度感应器测定高度,补偿基板的挠曲之后再进行检查。
■ 激光高度感应器的旋转
激光受到元件等的遮挡时将无法测定高度,因此可以给各检查对象分别从 4 个方向上设定激光高度感应器测定时的角度。
参考
关于激光高度感应器的详细使用方法,请参照本书末选件手册中的“激光高度感应器”的内容。
1-7
1
4.轴的组成
下面,介绍 YSi-X 检查机的伺服电机所控制的轴的组成与轴的运行方向。
YT轴
MS轴
HZ轴
LY轴
LX轴
HS轴
XT轴
正方向
负方向
基板
传送轨
传送工作台
轴的组成
传送方向: 以右→左传送基板为例
W轴
HL轴
X射线源
光学相机
X射线相机
X射线相机工作台
激光高度感应器
挡板单元
25108-M6-00
■ 各轴的功能
轴名 功能
XT 轴 沿传送基板的方向平行移动传送工作台 ( 基板 )。
YT 轴 沿垂直于传送基板的方向移动传送工作台 ( 基板 )。
W 轴 调节传送宽度。
MS 轴 根据传送的基板大小 ( 长度 ) 移动挡板的位置。
HZ 轴 调节 X 射线源与基板的距离。(X 射线变焦拍摄用 )
HS 轴 使 X 射线源下降时移动光学相机。( 使 X 射线变焦拍摄用相机退避时使用 )
LX 轴 沿传送基板的方向平行移动 X 射线探测器。
LY 轴 沿垂直于传送基板的方向移动 X 射线探测器。
HL 轴 使激光高度感应器转动。
