NXTII 编程手册 - 第88页
3. 元件数据设置 QD148-03 76 NXT Ⅱ编程手册 Actual Pick up Body Hei ght 指定夹紧位置上元件的高度。 Clamp Margi n 指定夹紧过程中机械爪的宽度与 实际机械爪宽度之间的间距。该设 置只对 OF 工作头有效。 Motor Gripp ing Force 指定吸取中机械爪的元件保持力 。该设置只对 OF 工作头有效。 Tolerance X / Toleranc e Y 设置吸嘴中心…
QD148-03 3. 元件数据设置
NXT Ⅱ编程手册 75
Process--Pick
Do Auto Offset
设置是否对吸取修正量进行自动补正。若选择“No”,元件吸取位置为元件中心。但是可能
会因为各种原因而导致不能在元件中心执行吸取。遇到这种情况时可以通过影像处理计算
修正量并反馈到吸取位置,使得吸取位置尽量靠近元件中心。
如果元件没有在它的中心处正确进行吸取并且“Do Auto Offset”设置为 Yes,则将计算吸
嘴中心与元件中心之间的修正量以使后续元件能够在它们的中心处正确进行吸取。
Offset X/Y
通常情况下,元件吸取位置位于元件主体中心。但是对于某些异形元件来说,则有可能无法
在该位置上执行吸取。如果需要,请设置一个从封装凹槽中心到元件主体吸取点之间的修正
量以对这样的元件进行吸取。如果设置为 0,则吸取点就是封装凹槽中心。在 Offset X/Y 中
指定的数值是元件吸取点,影像处理中相机视野中心将与吸嘴中心对齐。
Offset Z
用于设置供料器凹槽中元件吸取位置的向上或向下修正量。
Tray Pick Offset Z
用于设置料盘凹槽中元件吸取点的向上或向下修正量。
Soft Pick Speed
用于设置吸取元件后,元件在 Z 轴上进行搬运的最大可能速度。
Enable Pressure Sensor
使用带有压力传感器的工作头时,用于设置是否以 220gf 进行吸取。如果设置为 “Yes”,
则使用压力控制功能吸取元件;选择 “No”时,则不使用压力控制吸取元件。该设置只用
于带有这个传感器的工作头。该设置优先于 soft pick-up 设置。
Do Prerotation
NXT 忽略该设置。自动对支持该功能的工作头执行预旋转。
Do Prerotation for Custom Nozzle
指定使用定制吸嘴时是否在影像处理之前将元件旋转到 (或接近)贴装角度。该设置只对
H01、H02 和 G04 工作头有效。
Do Part Height Check
指定是否执行元件高度检查。工作头可以检查元件高度时才使用该设置 (例如,H12SQ)。
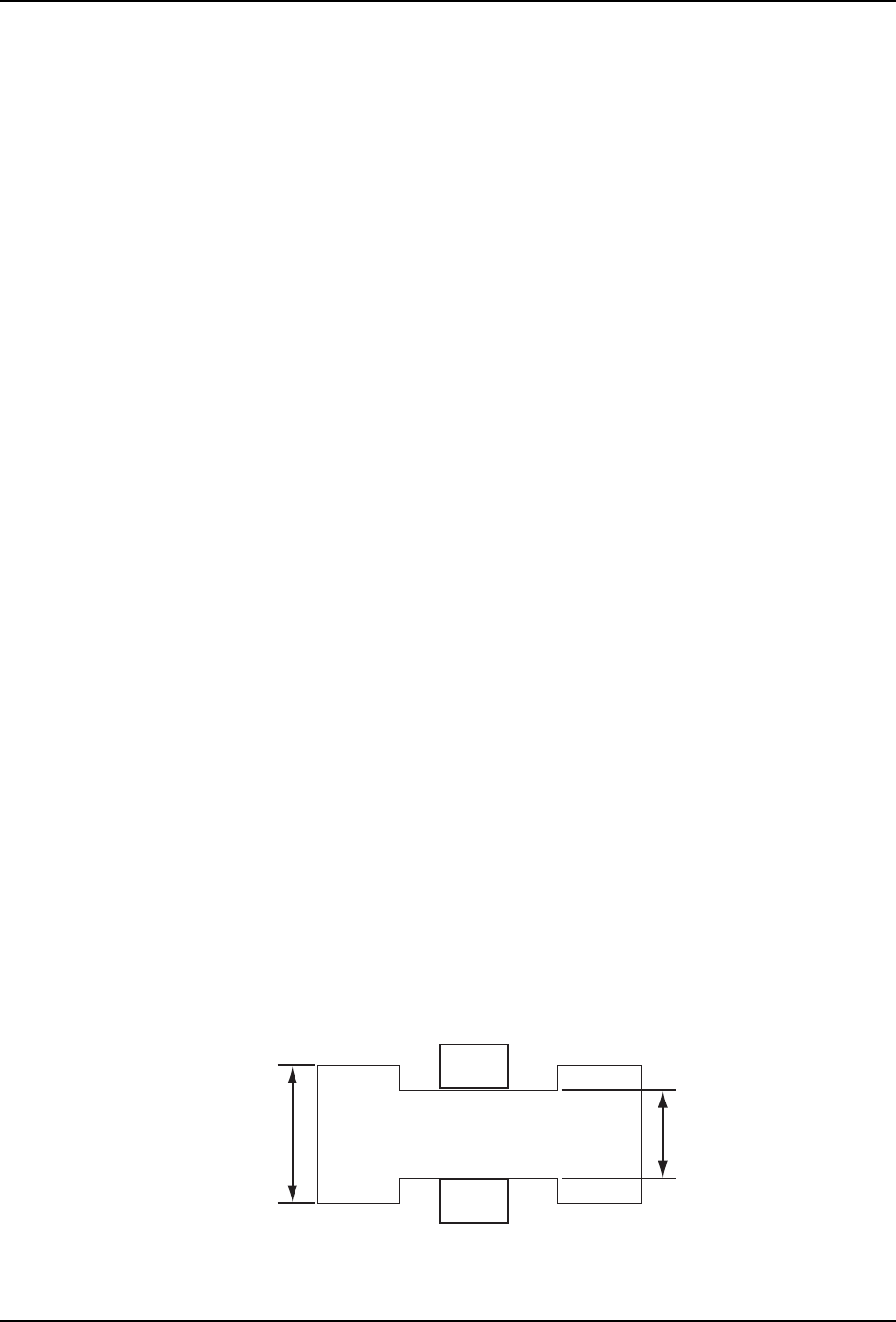
Clamp Width
指定夹紧位置上元件的宽度。该设置只对 OF 工作头有效。
ܗӊЏԧ
ᴎẄ⟾
ᆑᑺ
01PRG063S
ᴎẄ⟾
།㋻ᆑᑺ
3. 元件数据设置 QD148-03
76 NXT Ⅱ编程手册
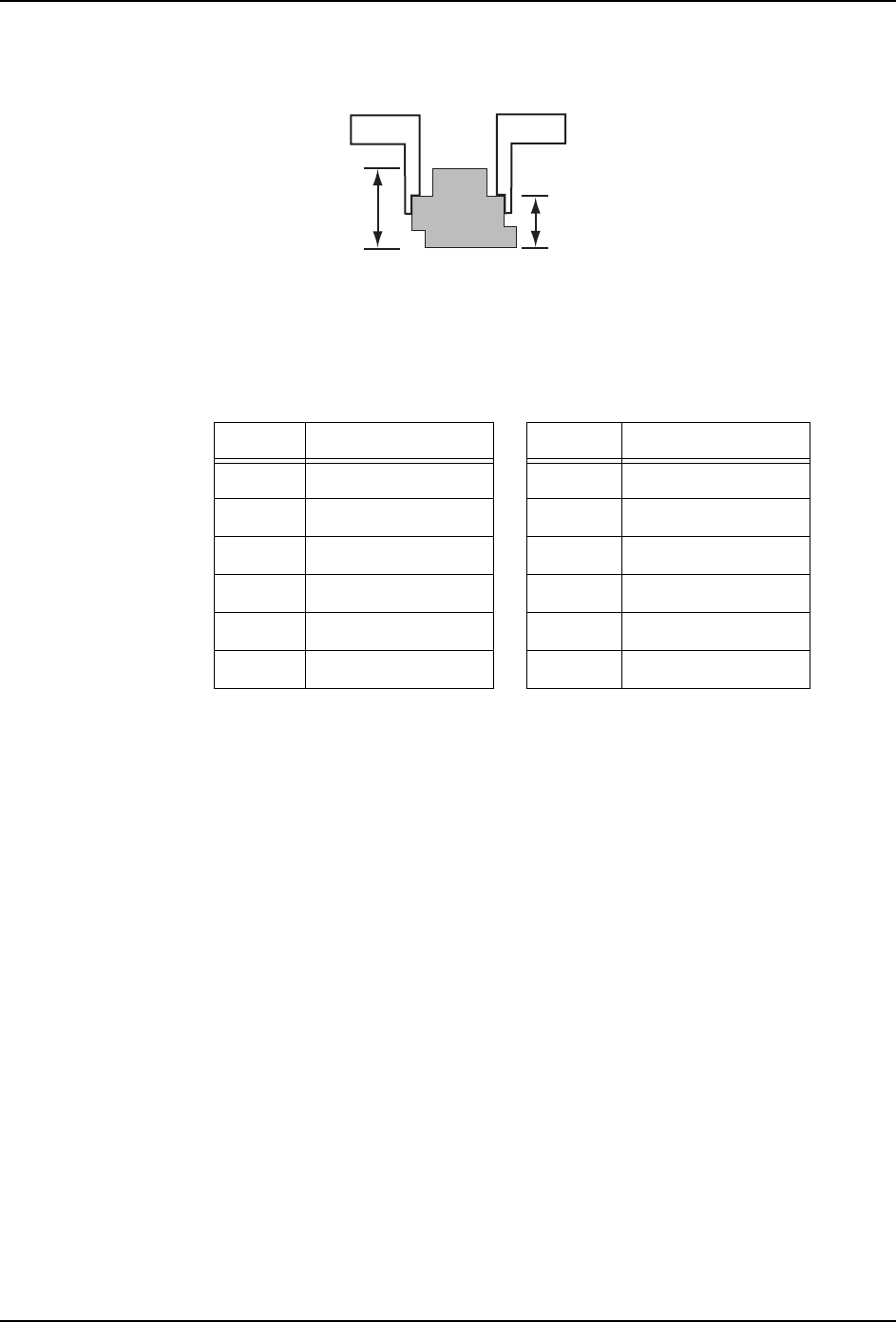
Actual Pickup Body Height
指定夹紧位置上元件的高度。
Clamp Margin
指定夹紧过程中机械爪的宽度与实际机械爪宽度之间的间距。该设置只对 OF 工作头有效。
Motor Gripping Force
指定吸取中机械爪的元件保持力。该设置只对 OF 工作头有效。
Tolerance X / Tolerance Y
设置吸嘴中心与元件中心间的公差值。如果超出了公差值,则元件被废弃。
Tolerance Q
设置吸嘴中心与元件中心在 Q 方向上的公差值。通常输入的公差值 Q 为 30 度。对于主体尺
寸大于 20mm 的元件来说,请输入 15 度。
Shuttle Speed
设置 TU 料盘装载到机器上时的往复臂速度。4 是 TU-L 的最大速度,5 是 TU-LT 的最大速度,
1 是最小速度。
Magazine Speed
设置上下移动 TU 内的料盘箱时的加减速度。
Џԧ催ᑺ
01PRG064S
ᴎẄ⟾
ᅲ䰙Џԧপ催ᑺ
ᴎẄ⟾
ܗӊЏԧ
设置值 元件保持力 (N) 设置值 元件保持力 (N)
0 6.7 6 9.7
1 7.2 7 10.2
2 7.7 8 10.7
3 8.2 9 11.2
4 8.7 10 11.7
5 9.2 - -
QD148-03 3. 元件数据设置
NXT Ⅱ编程手册 77
Process--Place
Do Place Check
指定是否检查执行贴装后元件还在吸嘴上。该设置只用于支持该功能的工作头(例如,H01,
H02,G04,H12SQ)。
Offset X
指定 X- 方向上的元件贴装修正量。
Offset Y
指定 Y- 方向上的元件贴装修正量。
Offset Z
设置元件贴装高度的修正量。
Pressure
使用兼容工作头进行贴装时,指定用于贴装元件的压力。NXT-2 的有效范围是从 220 gf 到
1020 gf。如果指定为“0”,则贴装元件时将不使用压力控制。如果指定了小于最小值的设
置,将使用最小压力进行贴装。如果指定了大于最大值的设置,将使用最大压力进行贴装。
该设置只用于支持该功能的工作头。该设置优先于 soft placement 设置。
Transport Speed
设置工作头从吸取位置到贴装位置的速度,以最高传输速度的百分比来进行设置。
Transport Speed Z
设置吸嘴传送中 (从吸取位置到贴装位置)沿 Z 轴移动的速度。
Transport Speed Q
设置吸嘴传送中 (从吸取位置到贴装位置)的旋转速度。
Soft Place Speed
设置 Z 轴的传送速度。这是元件降低到子电路板表面时的速度。如果该速度过快,吸嘴撤回
时元件会被反弹,这样会导致贴装偏移。
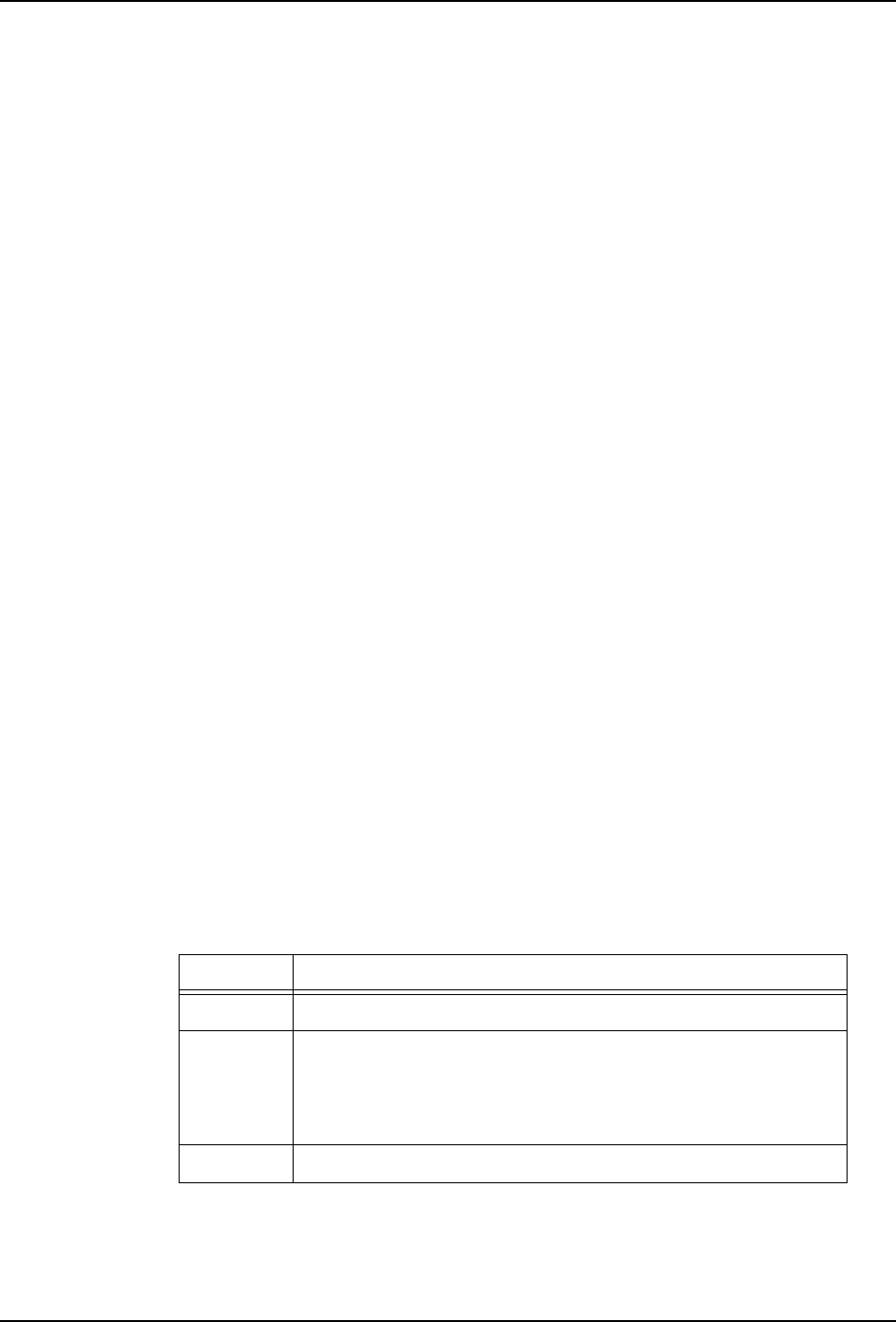
Place Motion Selection
使用压入贴装功能时,设置该贴装压力 (力矩)。默认设置值为 “0”时该功能无效。输入
1-4 之间的任何一个值后启动压入贴装功能。输入值为 5 时不使用压入控制进行贴装,但是
如果使用机械爪来吸取元件,则元件顶端与机械爪边缘的间隙为 0mm(通常间隙为 0.5mm)。
备注 )在使用压入贴装功能时,通常应确保支撑销在电路板的下面。
备注 )当发生压入贴装错误且清除错误后,如果生产恢复,机器会认为该元件已经贴装过并
且进入后续顺序的贴装 ( 不执行补件 )。
设置 说明
0 不使用压入贴装功能,进行普通的元件吸取和贴装。
1 to 4 输入此范围内的任意值后其动作都相同。压入贴装功能用于贴
装。通常情况下,吸取元件和元件贴装期间,使用 [Placing
Thrust] 中设置的力。如果力没有达到合适的贴装高度范围,将
会发生错误并且不能贴装元件。(这些设置下的旧机种操作是不
同的。为了与旧机种兼容,此处对任何设置值都没有区别。)
5 不使用压入贴装功能,进行普通的元件吸取和贴装。