第15章 系统设置 - 第4页
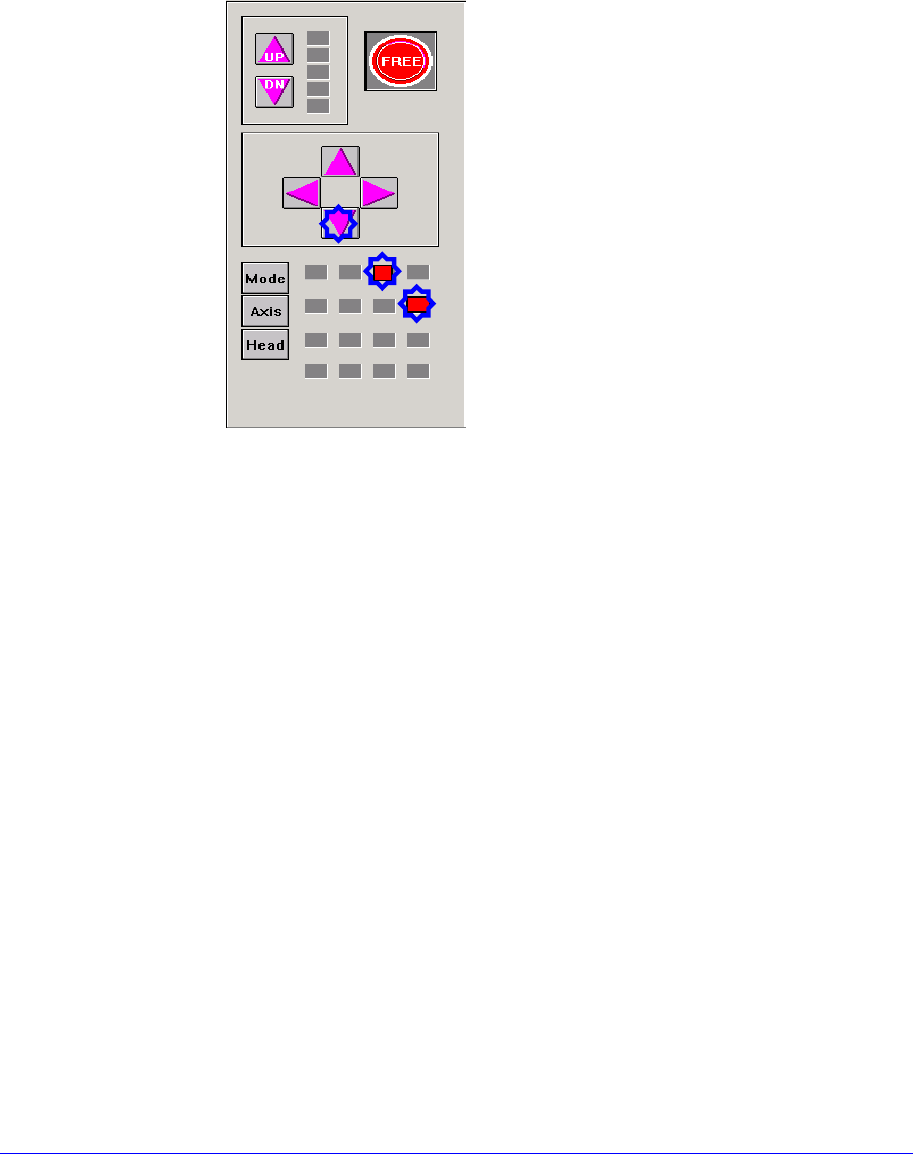
15-4 3. 为了 把 Fiducial Cam era 移 动到下 图位置 ,首先 用鼠标 选择 <P CB 停止 点 > 编 辑 框 , 然 后 在 < 示 教 > 领 域 的 组 合 框 选 择 “ 大 型 凸 轮 ” 再 点 击 <Move> 按钮。 -1- St op p er Boar d Sto p p e r Boar d Te ach in g P o in t C o n v…
15-3
<初始宽度> 编辑框
Conveyor Width Home 状态下实际测量Width距离记入。
<宽度补偿> 编辑框
移动Conveyor Width 移动时 Margin 值相当的值。
以下是设定Conveyor Width Origin方法。
1. 请用Teaching Box如下图所示实施Conveyor Home。
2. 请用测量仪准确测出输送机宽度(输送机机架之间的距离)后其值输入到
<初始宽度> 编辑框。
3. 点击<更新> 按钮,反映变更值。
4. 利用测量仪测出所要检验PCB的Y值后在Board对话框中<板的大小>领
域记入该值,再点击 <传送轨道宽度> 按钮把输送机的宽度配合输入
的Y值。
此时,先确认输送机内部有无污质,如果有污质请除去该污质。
5. 请点击<PCB 传入> 及<PCB 传出> 按钮确认检验 PCB是否正常运输
到贴装位置、离开输送机。如果发生问题,请重新设定。
6. Width Margin一般使用基本值,但用户可进行修改。本设备的输送机和
输送带之间的多余空间为2mm左右。因此,输送机Width Margin输入 1
mm 以上时,设定的PCB可能会直立。
<PCB原点偏移量> 领域
设定设备原点和PCB机板之间的偏移值。
< PCB停留点> 编辑框
设定PCB机板的原点。
设定PCB Stop Origin方法如下。
1. Board对话框中对准输送机宽度,点击 <PCB 传入> 按钮把任意的Boar
d投入到输送机。
2. System Setup菜单中执行 Conveyor辅助菜单。
15-4
3. 为了把Fiducial Camera移动到下图位置,首先用鼠标选择 <PCB停止点
>编辑框 ,然后 在 < 示教> 领域 的组合框选择 “大型凸 轮”再点击
<Move> 按钮。
-1-
Stopper
Board
Stopper
Board
Teaching
Point
Conveyor후면
Conveyor전면
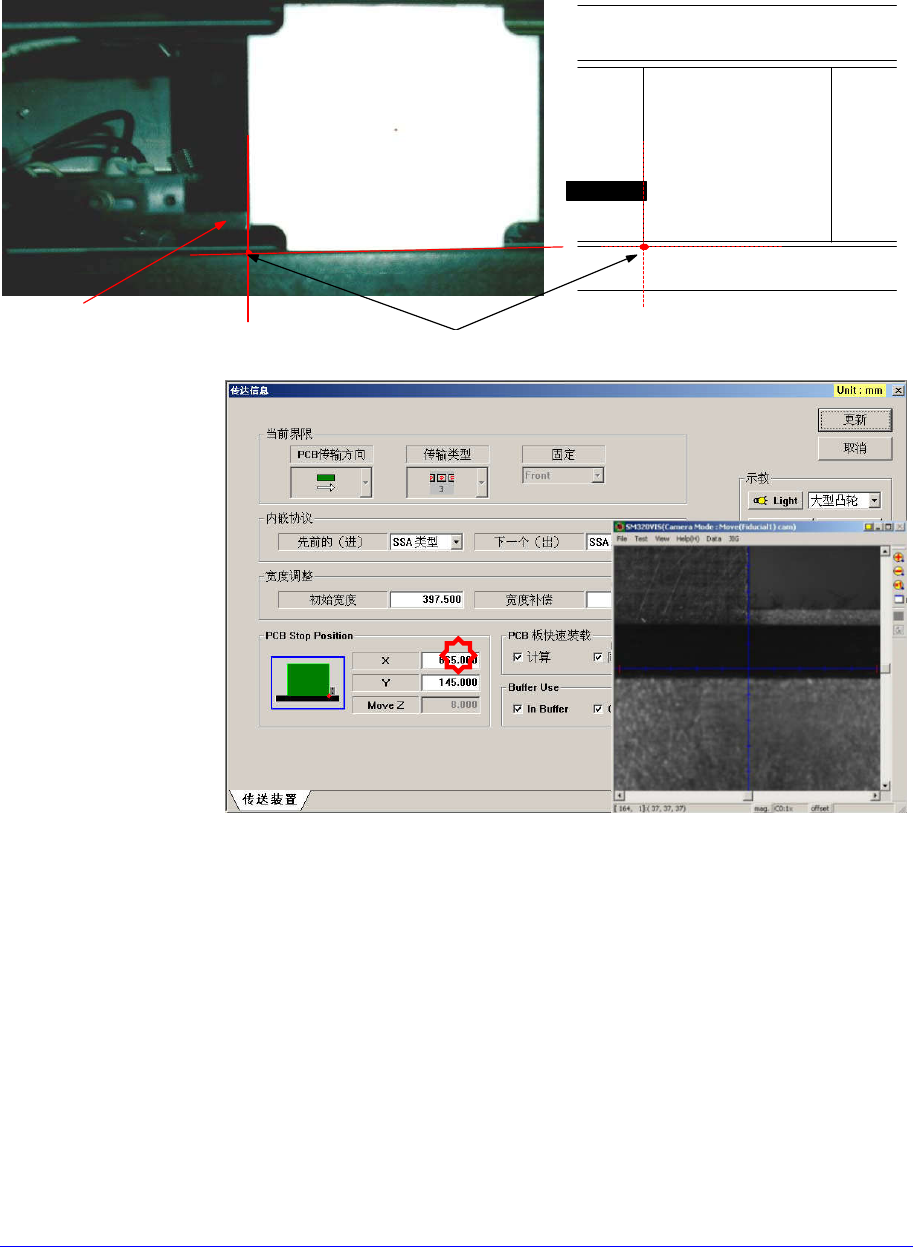
4. 利用Teaching Box移动磁头,把Teaching Point对准 Fiducial Camera的十
字线中心。
5. 用鼠标选择<PCB停止点> 编辑框,再点击 <Get> 按钮,把当前的坐
标值输入到<PCB停止点> 编辑框。
6. 结束正常程序,请点击 <更新>按钮适用变更值。
<更新> 按钮
把设定的数据传送到设备之后关闭对话框。
<取消> 按钮
忽略设定的数据直接关闭对话框。
Conveyor 后面
Conveyor 前面
15-5
15.2. (Position) [F4]
设定设备的Feeder Base原点及系统回收箱的位置。
15.2.1. <进给基础> TAP对话框
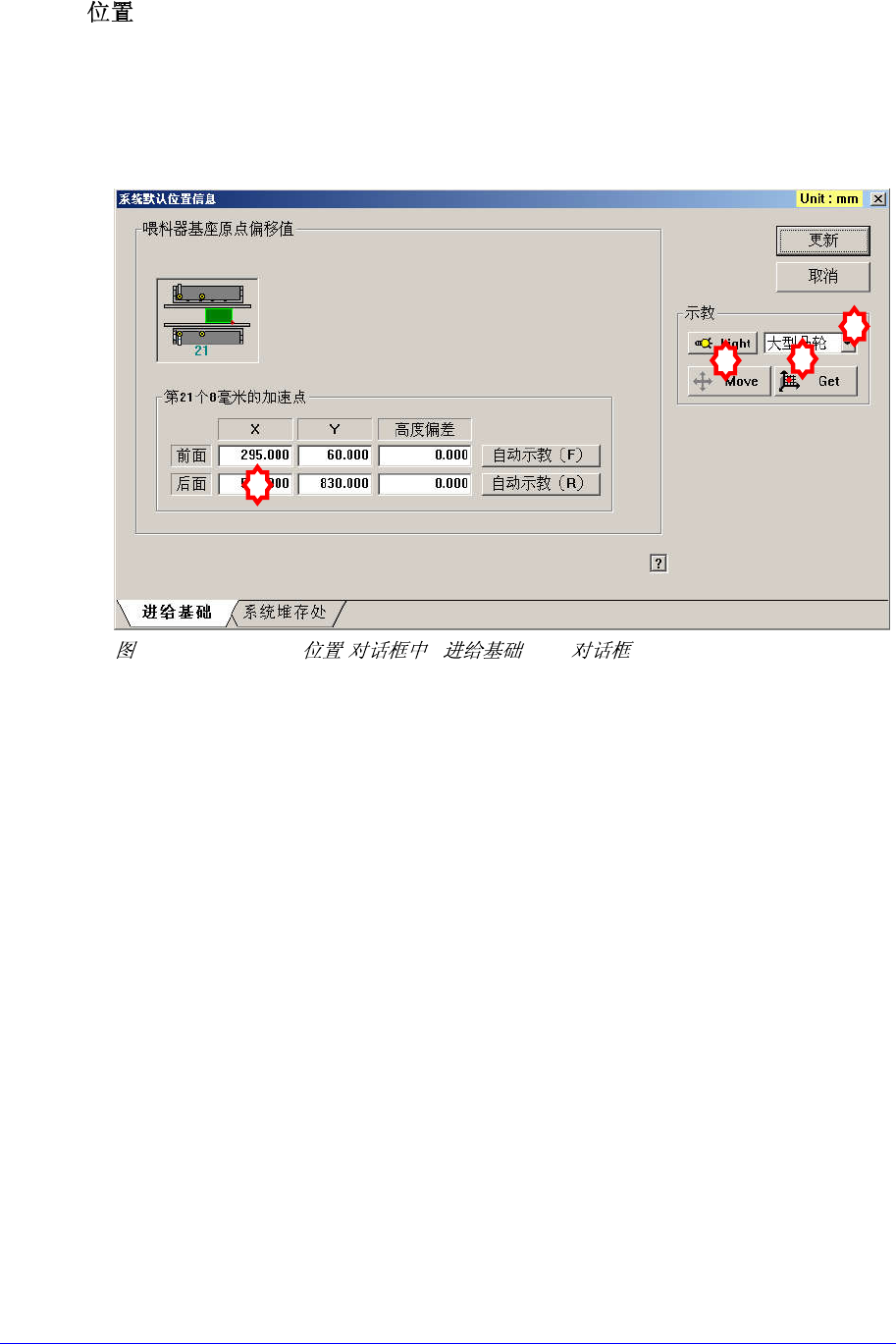
设定设备各构成品的原点。选择 “位置” 辅助菜单则显示如下对话框。
15-4. “Sys. Setup: ” “ ” TAP
<喂料器基座原点偏移值> 领域
设定Feeder Base有关的数据。
<第21 8mm站位吸取点> 编辑框
设定Feeder Base的原点。
设定Feeder Base原点的方法如下。
1. 把最小的部件(0603, 1005)Rell贴装在喂料器后设置在前面Feeder Base的
21号槽。
Feeder设置钱,请确认 Feeder Base上面有无废弃的部件,如果有请除
去废弃部件。
2. 用鼠标选择<第21 8mm站位吸取点> 编辑框后,在 <示教>领域的组合
框中选择 ‘大型凸轮’。
3. 请点击<Move> 按钮把Fiducial Camera移动到设置在前面feeder base的
21号槽的带式喂料器的吸附点。
4. 请利用Fiducial Camera示教带式喂料器的吸附点。此时,如下图所示示
教中心点。此时,该示教不是部件中心的料袋(pocket)中心点。
1
2
3
4