00196962-04-BA-SX12-V2-EN.pdf - 第103页
User manual SIPLACE SX1/SX2 3 Technical data and assemblies From software version SC 706.1 SP1 Version 10/2014 3.3 Dimensions and weight 103 3.3.5 Center of gravity 3.3.5.1 SX1/SX2 machine center of gravity 3 Fig. 3.3 - …
3 Technical data and assemblies User manual SIPLACE SX1/SX2
3.3 Dimensions and weight From software version SC 706.1 SP1 Version 10/2014
102
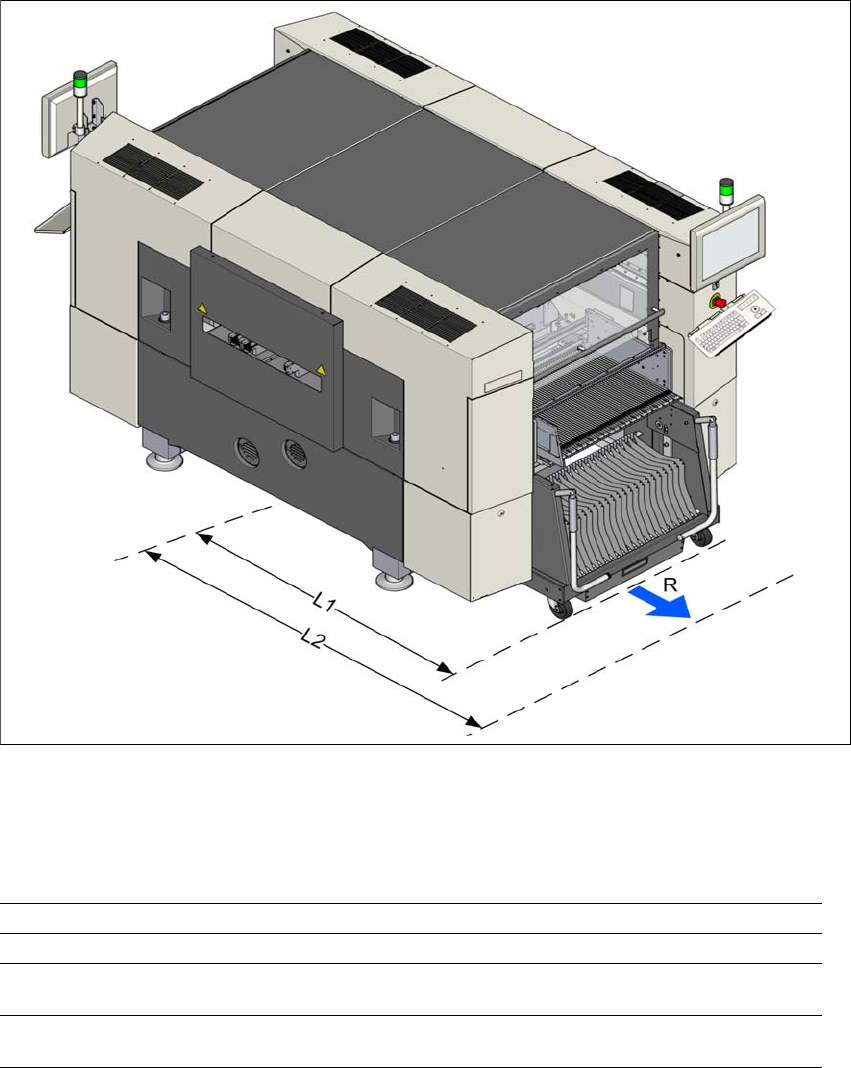
3.3.4 Maneuvering distance for the component trolley on SIPLACE SX1/SX2
3
Fig. 3.3 - 3 Maneuvering distance for the component trolley on SX1/SX2 machine
The maneuvering radii "R" for the component trolley in SX1/SX2 machines is:
3
3
Location 1 (outside) Location 2 (inside)
Maneuvering radius R 760 mm 760 mm
Distance L1: Machine center to
outer edge of component trolley
1300 mm 1175 mm
Distance L2: Machine center to
wall
2060 mm 1935 mm
User manual SIPLACE SX1/SX2 3 Technical data and assemblies
From software version SC 706.1 SP1 Version 10/2014 3.3 Dimensions and weight
103
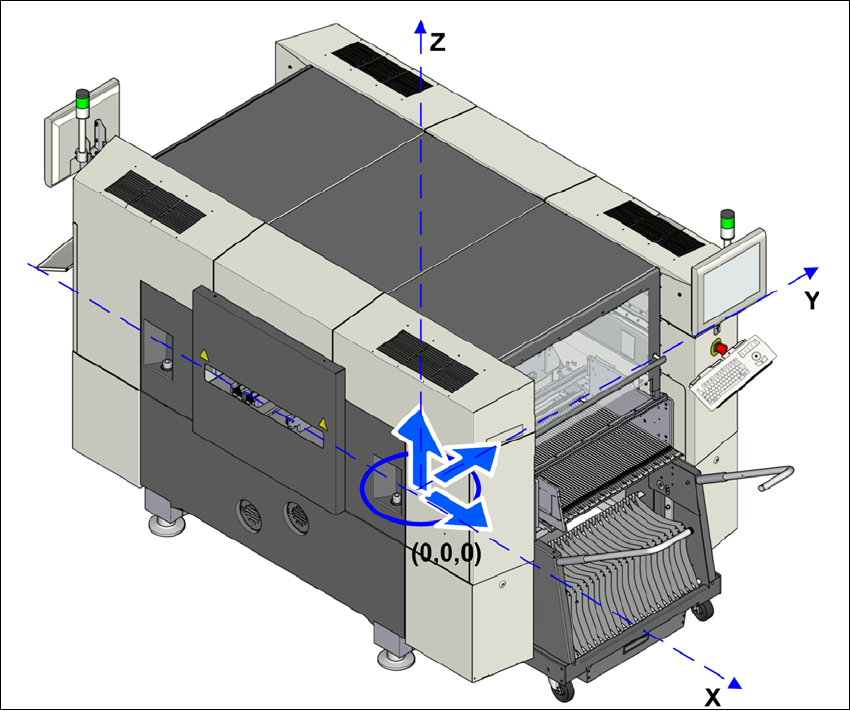
3.3.5 Center of gravity
3.3.5.1 SX1/SX2 machine center of gravity
3
Fig. 3.3 - 4 Center of gravity for SX1/SX2 machines in millimeters
X coordinate 0 mm
Y coordinate 0 mm
Z coordinate 738.5 mm
These center of gravity coordinates relate to placement machines with a PCB conveyor height of
900 mm.
3 Technical data and assemblies User manual SIPLACE SX1/SX2
3.4 Overviews of the modules From software version SC 706.1 SP1 Version 10/2014
104
3.4 Overviews of the modules
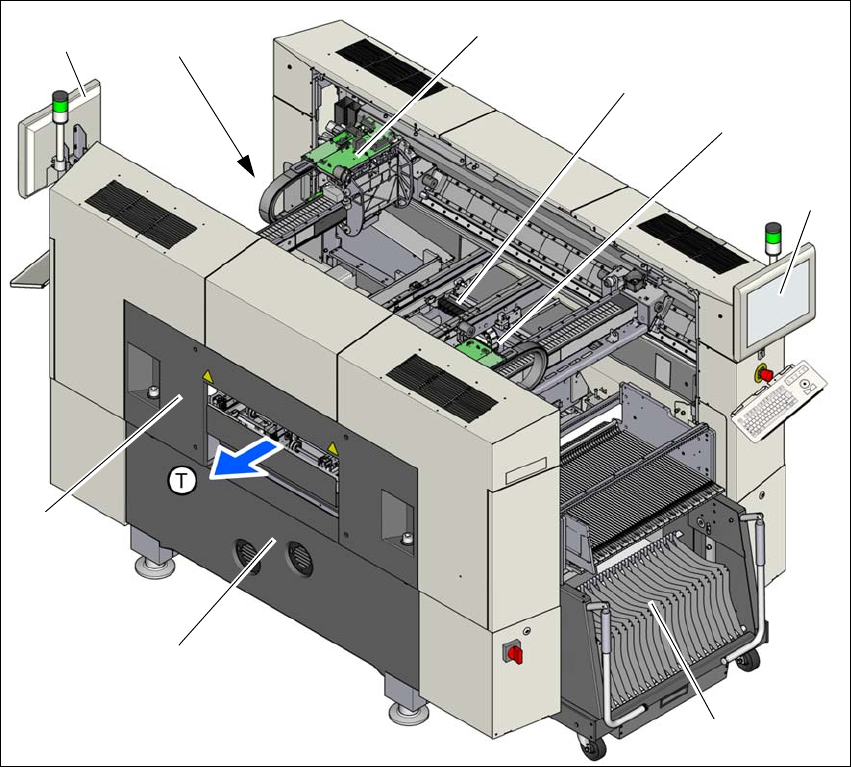
3.4.1 Overview of SIPLACE SX2 assemblies
3
3
Fig. 3.4 - 1 SX2 machine - overview of assemblies
(1) Basic module
(2) Robot module
(3) Gantry 2 with placement head
(4) PCB conveyor (single or dual conveyor)
(5) Gantry 1 with placement head
(6) Monitor with keyboard (2x)
(7) Component trolley at location 1
(8) Location 2 with COT insert, tape cutter, empty tape duct
(T) Direction of PCB transport
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(6)
(8)