YG100R_Ope_K - 第48页
1-20 1 6 . 축 구 성 장 비 의 S e r v o 모 터 제어에 의한 축 구 성 및 동 작 방향 에 대해 설명합 니다 . Y 축 X 축 W 축 PU2 축 (옵션) PU1 축 R2 축 R1 축 헤드 축 구성 Z1 Z2 Z3 Z4 Z5 Z6 Z7 Z8 플러스방향 마이너스방향 컨베이어 레일 PCB 2 712 1-M 1- 0 0 ■ 각 축 의 기 능 축 명 칭 기 능 • 역 할 X 축 컨베…

1-19
1
5. 컨베이어 유니트와 부품인식 장치
기판을고정하기위해사용하는컨베이어유니트에대해설명합니다 .
4
5
2
1
7 6
3
컨베이어 유니트
뒤에서 본 사진
2712 0-M1- 00
1. 메인스톱퍼
컨베이어내에반입된기판은메인스톱퍼에서정지합니다 .( 더블스톱퍼는옵션 )
2. 푸쉬업 플레이트
푸쉬업상에푸쉬업핀을설치하고 ,기판을아래방향에서부터서포트합니다 .
3. 푸쉬업 핀
푸쉬업상에설치하고 ,기판을아래방향으로부터고정합니다 .
4. 기판누름 플레이트
기판고정시에위에서부터기판의틀을누릅니다 .
5. 클램프식 기판고정 유니트
기판의틀을아래방향으로부터끼워고정합니다 .
6. 멀티 카메라
부품인식용카메라로 ,앞뒤에한대씩장착되어있습니다 .
7. 코플러내리티 체커 ( 옵션 )
멀티카메라와연동해서부품의리드또는BGA 의리니어리티와코플러내리티를측정합니다 .
1-20
1
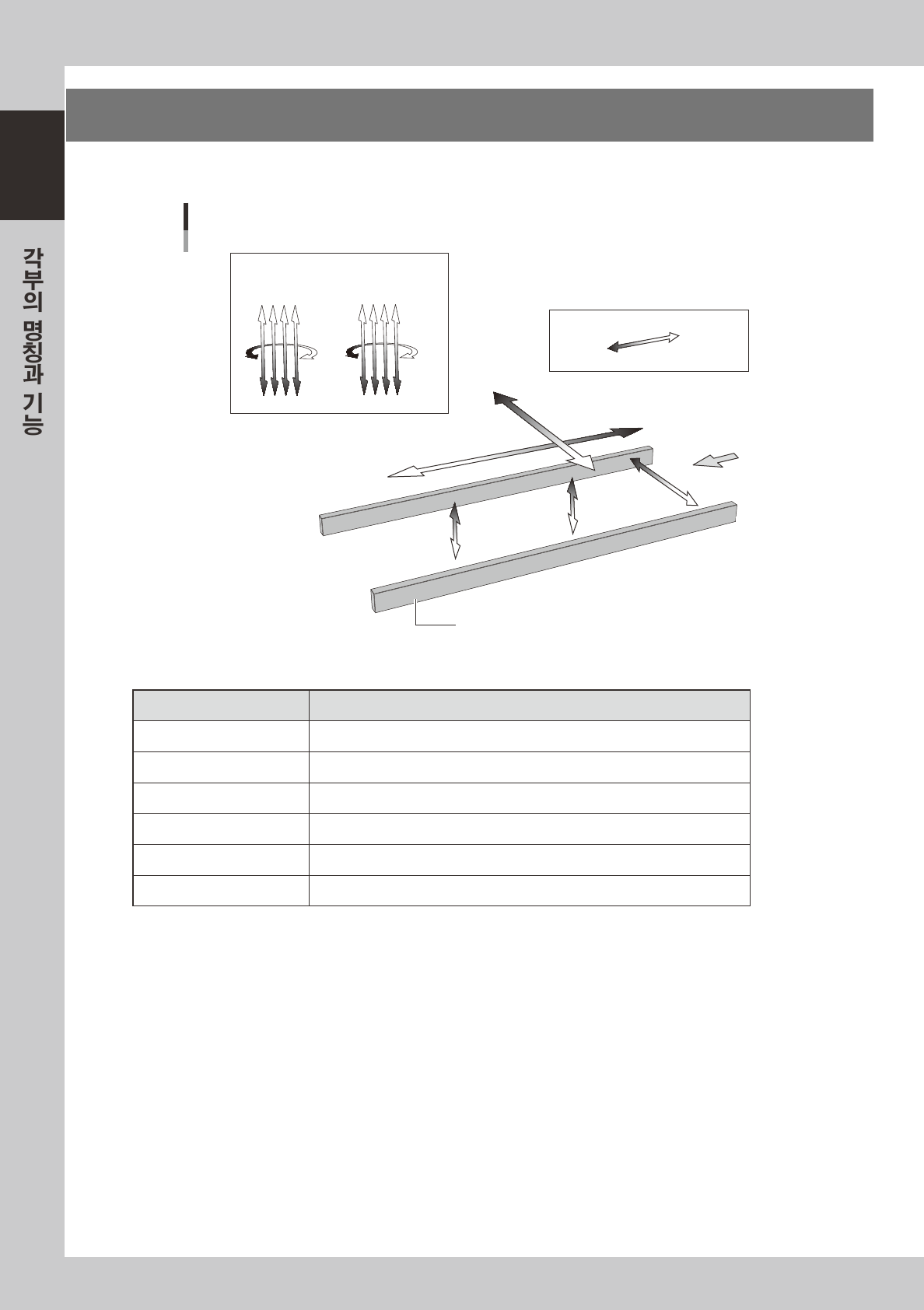
6. 축구성
장비의 Servo 모터 제어에 의한 축구성 및 동작방향에 대해 설명합니다 .
Y 축
X 축
W 축
PU2 축
(옵션)
PU1 축
R2 축 R1 축
헤드
축 구성
Z1 Z2 Z3 Z4
Z5 Z6 Z7 Z8
플러스방향
마이너스방향
컨베이어 레일
PCB
27121-M1- 00
■ 각 축의 기능
축명칭 기능
•
역할
X 축 컨베이어의 기판반송 방향과 평행으로 헤드를 이동합니다 .
Y 축 컨베이어의 기판반송 방향과 수직으로 헤드를 이동합니다 .
Z1 ~ Z8 축 각 헤드로 부품흡착
•
탑재헤드를 위 아래로 이동합니다 .
R1 ~ R2 축 각 헤드로 노즐샤프트를 회전시킵니다 .
W 축 컨베이어 폭을 변경합니다 .
PU1, PU2( 옵션 ) 축 푸쉬업 플레이트를 위 아래로 이동합니다 .

1-21
1
7. 블로우 스테이션
블로우스테이션은 ,각스테이지에배치되어있습니다 .노즐및샤프트내에고압블로우로먼지를털어내고청소
하는기능을사용할수있습니다 .
블로우 스테이션
블로우 스테이션
노즐방치
검지센서
27122-M1-0 0