三星SM421 Introduction硬件装机手册_.pdf - 第73页
Module Functi on 6-3 Con v eyor Part W idt h Con t r ol Part Back Up T abl e Mai n Fr a me PCB In B elt Ass` y PCB Work i n g B elt Ass`y PCB Ou t Belt Ass`y W ork ing S t opper PCB De t ect S e n sor Edge F ix e r Aut o…
Samsung Component Placer SM421 Introduction
6-2
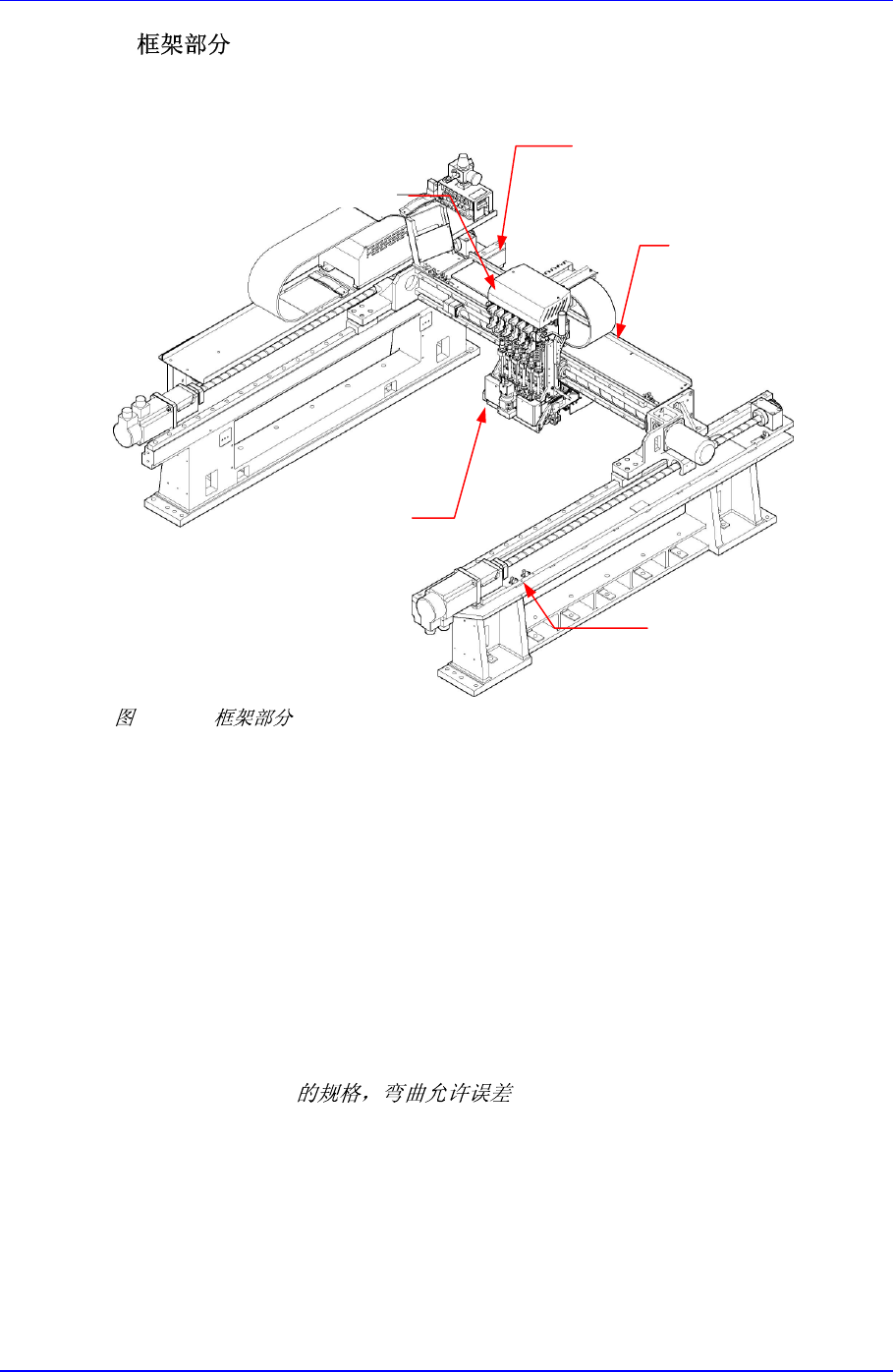
6.2. X-Y
6.2.1. 结构
6-2. X-Y
6.3. PCB Transport System
6.3.1. 构成
PCB Transport System 传送系统的主要工作是传送从前道工序传过来的 PCB,指
定部品的贴装位置,固定 PCB 的系统。
由于 PCB Transport System 传送系统分成3段,具有把 PCB 交替时间缩短为最小
限度的特点。固定PCB时,采用从PCB上面固定的方式,提高 PCB的平面度。
可以适应从小型 PCB((L)50.0mm×(W)30.0mm)到大型 PCB Transport System PCB
((L)610.0mm×(W)510.0mm)的比较广泛的范围。
请参考 “2.6.1 PCB
“ 。 PCB传送系统的构成分为如下。
Y2 Frame
X Frame
Y1 Frame
Carrier Ass’y
Head Assembly
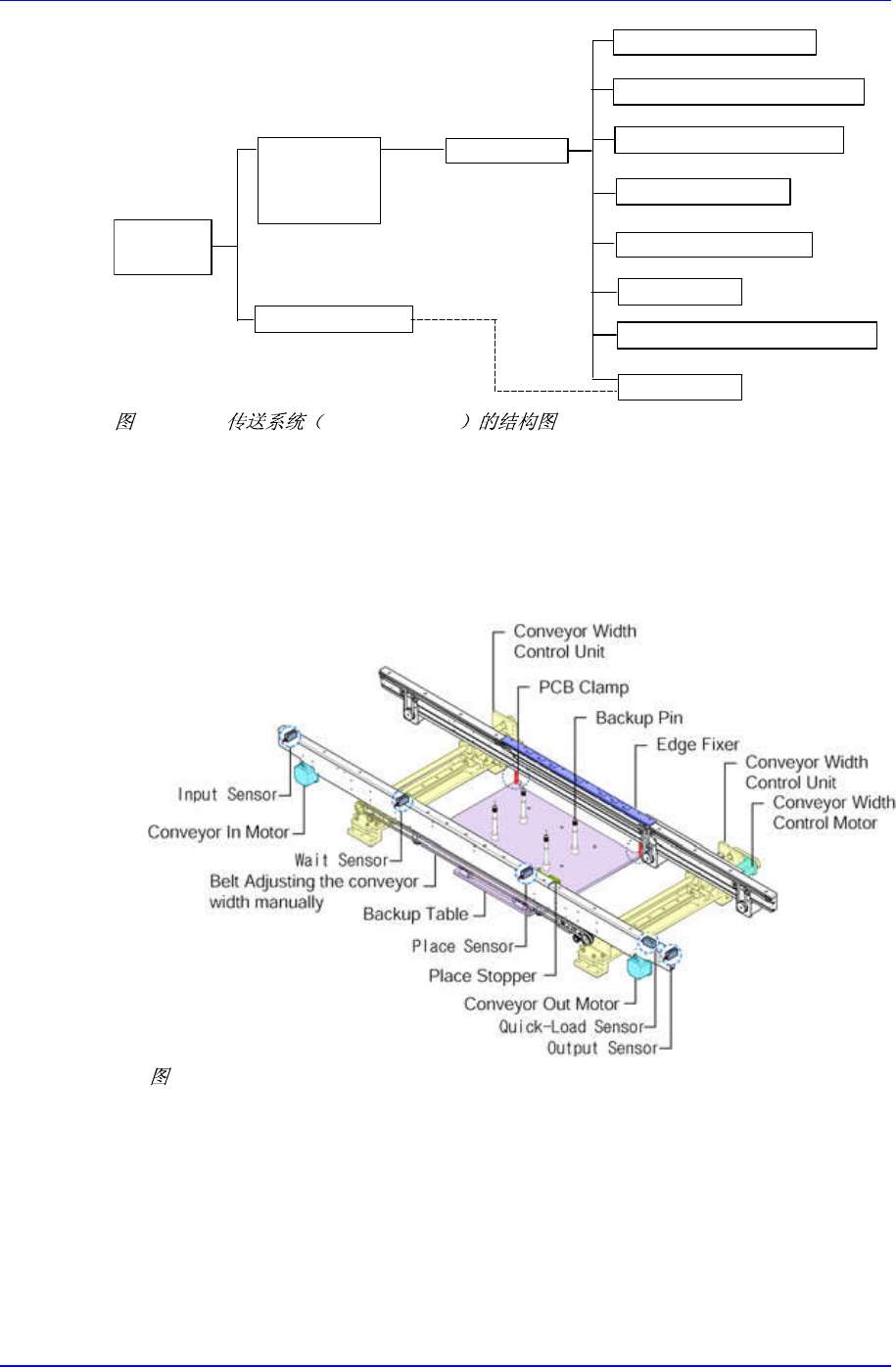
Module Function
6-3
Conveyor
Part
Width
Control
Part
Back Up Table
Main Frame
PCB In Belt Ass`y
PCB Working Belt Ass`y
PCB Out Belt Ass`y
Working Stopper
PCB Detect Sensor
Edge Fixer
Auto Width Control Unit
PCB Clamp
6-3. PCB Conveyor System
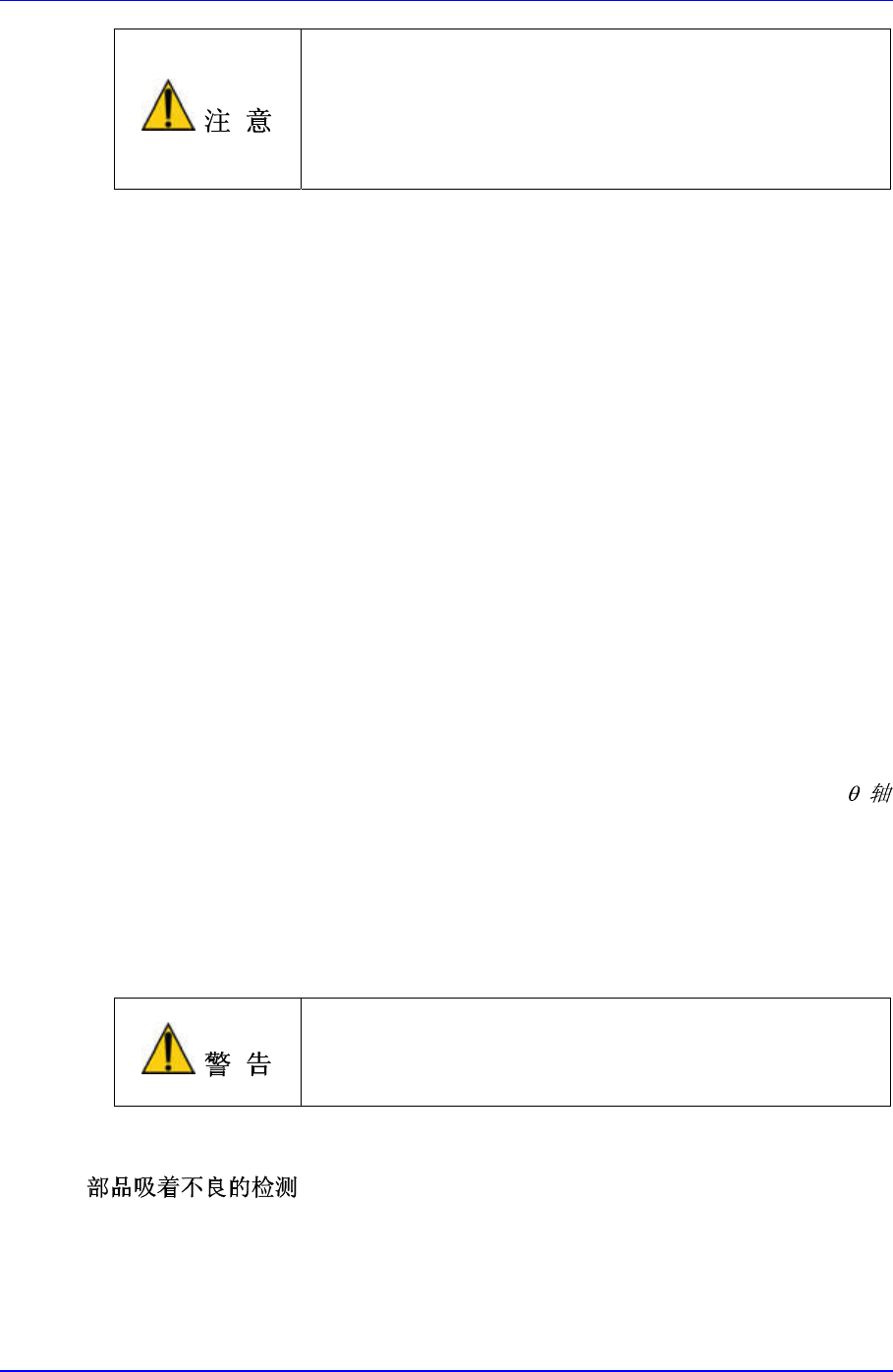
6.3.2. 功能
各构成部分的功能如下。
主框架(Main Frame)
安装在宽度调整部件上,构成PCB传送的基本条件,其上面配各种部品。
6-4. PCB Conveyor System Main Frame
宽度调整部件
根据PCB Size调节Rail宽度的部分,由LM Guide和Lead Screw, Timing Belt, C
onveyor宽度手动调节带等构成。
Samsung Component Placer SM421 Introduction
6-4
在未检查传送装置(Conveyor)干涉或传送装置(Conveyor)内
是否有异物时调整传送装置(Conveyor)宽度会损伤传送装置(
Conveyor)。确保在调整传送装置(Conveyor)宽度前检查传
送装置(Conveyor)干涉或传送装置(Conveyor)内是否有异物
。
PCB 传送装置(Conveyor)组件
它由 AC( 步进)马达和可调速度传送装置(Conveyor)构成。 PCB 传送装置
(Conveyor)分成 3 段后,PCB 的工作当中,没有工作区域(Working Area)的传
送装置(Conveyor)的驱动也可以进行 PCB 的进入,退出(In, Out),所以利用
工作区域(Working Area)的传送装置(Conveyor)可以夹住(Clamping)PCB。
贴装止挡器(Place Stopper)
它起把 PCB 停止在工作位置的作用,而且 PCB 在退出工作位置时松开 PCB,
等待 PCB 退出。
PCB 感应传感器
确认传送装置(Conveyor)上的 PCB 的位置。
边缘固定器(Edge Fixer)
PCB 到达工作位置后开始工作之前,作为保障 PCB 的正确位置的一种方法,
通过把 PCB 推到一个边缘的方法,使 PCB 以一边为基准确定位置。
PCB 的夹紧(Clamp)
PCB 达到操作位置而进行操作之前,起着矫正位于 Belt 上的 PCB , 而 且和
Back Up Table 连动运转。
Backup Pin
一般的情况下,部件的安装分为Head Spindle的上下运转(z轴)和旋转运转(
)。此时因Head的上下运转,PCB向Z轴方向受冲击。它是为了防止此类现象而
达到正确安装及扁平度,而支持 PCB下端部的Pin。Backup Pin位于Back Up
Table上部,而支持PCB机板。
工作台(Backup Table) (BUT)
PCB到达工作位置后开始工作之前,为了保证PCB的平面度,上升后通过Backu
PPin使PCB Clamp, Hole Fixer等工作来定位PCB。
在操作工作台时可能会因工作台上的异物及器具干涉损伤传
送装置(Conveyor)。请在清除工作台上的异物后进行操作。
BUT Table分解时请接受C/S联系。
6.4.
用真空吸着部品时,真空传感器(Vacuum Sensor)通过检测真空压力的变化来感
应吸着不良。吸着部品时的真空压力值基本上都用吸嘴来设定。如果需要安全的吸
着,也可适当调整每个吸嘴的吸着真空压力。