RX-7说明书(4) - 第293页
第 4 章 操作篇 4 4-12-6. 零件的引脚 /BGA 信息画面 可显示和编辑本 机零件 资料库中记录的零件 之引脚信息及锡球信 息。 n 脚形状 选择引脚 形状。 gull-wing : Gull-wing 形引脚 J-lead : J -lead 形引脚 脚参数 No. 1 种零件最多可选择 6 种参数。即使边不同 ,只要数据相 同,即可在指 定存 在方向后使用。 对引脚 分组后输入引脚参数 ,然后在每个引脚参 数中输入各 种…
第 4 章 操作篇
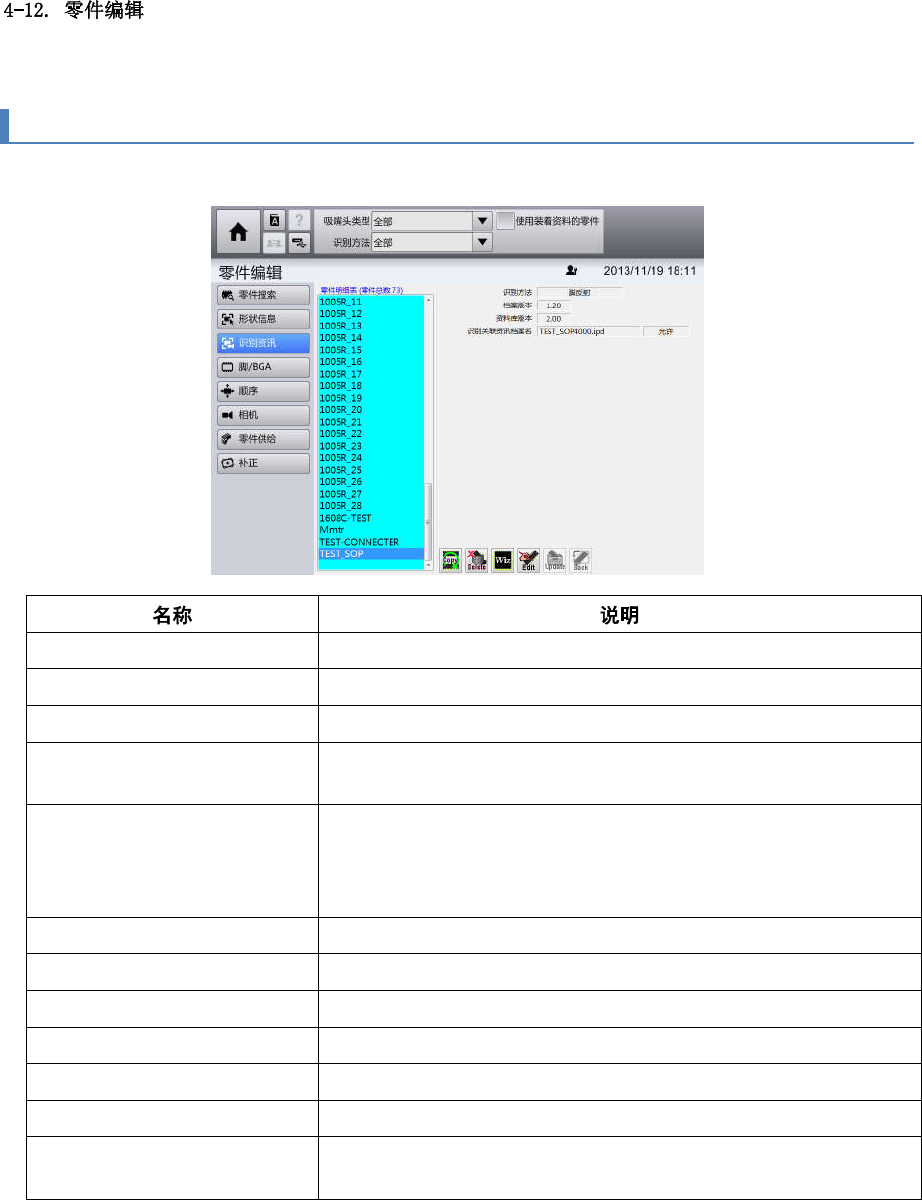
4-12-5. 零件的识别信息画面
可显示和编辑本机零件资料库中记录的零件数据之识别参数。
识别方法 xxxx
资料库版本 xxxx
档案版本 xxxx
吸嘴头类型
可使用多个吸嘴头类型时,选择要设定零件信息的对象吸嘴头类
型。
指定识别角度 选择是否指定识别角度。
•
无效:以任意角度识别。
•
有效:使用指定的识别角度识别。
识别角度 [指定识别角度]为[有效]时,输入识别角度。
识别高度补正 输入识别高度的偏移量值。
识别方法 选择分割识别时的识别方法。
分割数 输入分割识别时的分割数。
分割移动量 X 输入分割识别时 X 的移动量。
分割移动量 Y 输入分割识别时 Y 的移动量。
分割识别角度
输入分割识别时的识别角度(旋转角度)。顺时针旋转方向为正方
向 (+)。
218
第 4 章 操作篇
4
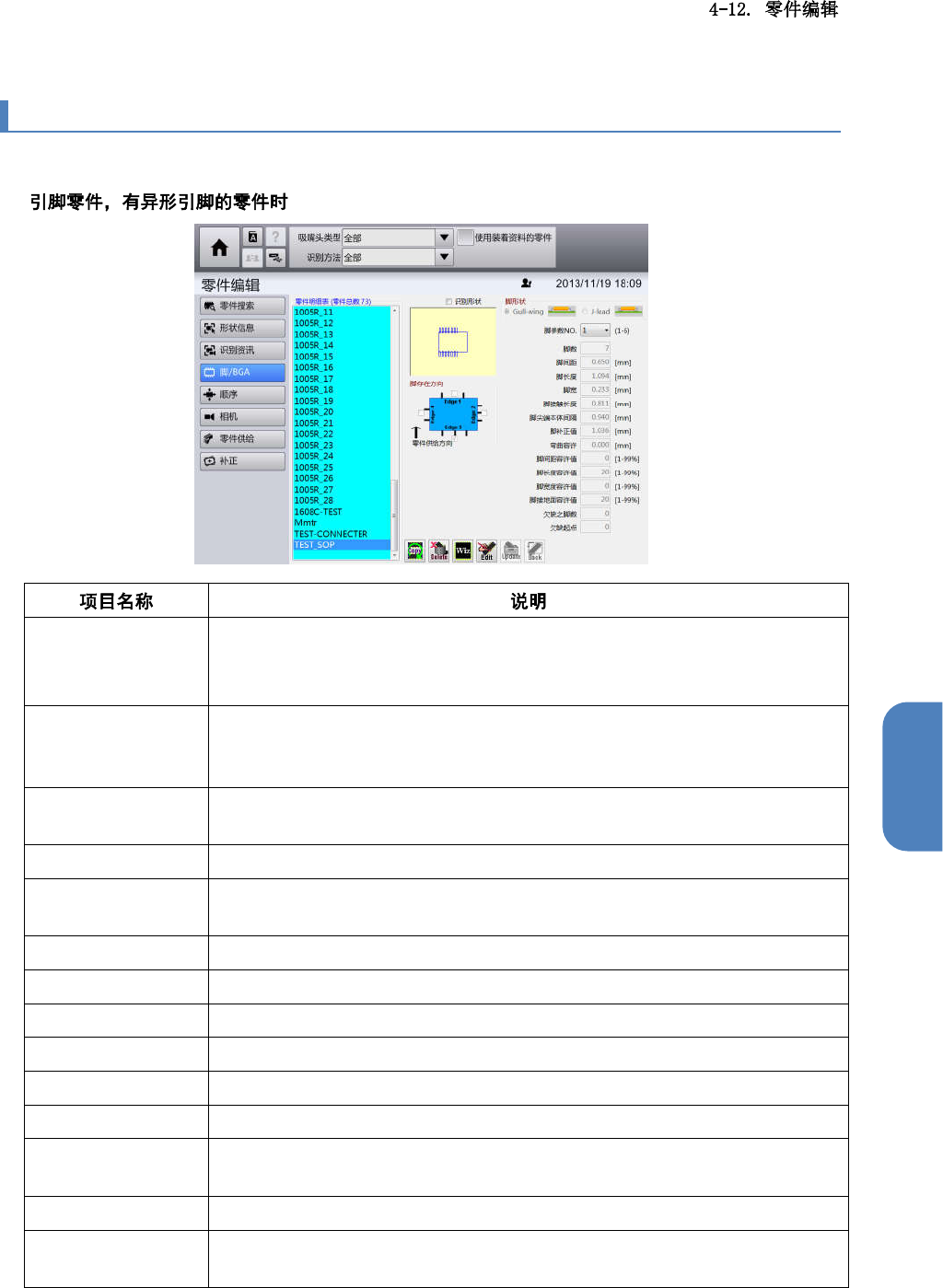
4-12-6. 零件的引脚/BGA 信息画面
可显示和编辑本机零件资料库中记录的零件之引脚信息及锡球信息。
n
脚形状 选择引脚形状。
gull-wing:Gull-wing 形引脚
J-lead:J-lead 形引脚
脚参数 No.
1 种零件最多可选择 6 种参数。即使边不同,只要数据相同,即可在指定存
在方向后使用。对引脚分组后输入引脚参数,然后在每个引脚参数中输入各
种数据。
脚存在方向边1~
边4
对不同的零件参数选择有无零件各边的引脚。各方向上有引脚时,选中相应
方向的边。没有引脚时取消选中。
脚数 在 1~9991 的范围内输入 1 个分组中实际存在的引脚个数。
脚间距
在 0.001mm~99.999mm 的范围内输入引脚的中心距离。分组中只有 1 个引
脚时,引脚间距中将显示 0[mm]。
脚长度 在 0.001mm~99.999mm 的范围内输入引脚的长度。
脚宽 在 0.001mm~99.999mm 的范围内输入引脚宽度。
脚接触长度 在 0.001mm~99.999mm 的范围内输入引脚和基板接触面的长度。
脚尖端本体间隔 在 -999.999mm~999.999mm 的范围内输入引脚前端与模型之间的间隔。
脚尺寸容许值 在 1%~99% 的范围内输入引脚宽度,长度,间距容许率。
脚接地面容许值 在 1%~99% 的范围内输入引脚和基板接地面的长度容许率。
脚补正值
在 -999.999mm~999.999mm 的范围内输入引脚分组的中心相对于零件中心的
偏移量值。
弯曲容許 在 0~99.999 的范围内输入引脚前端的弯曲容许率。
欠缺之脚数
引脚为等间距配置时,在 0~999 的范围内输入 1 个分组中引脚的缺损个
数。
219
第 4 章 操作篇
欠缺起点
输入 1 个分组中第一个缺损引脚的位置。俯视零件,按顺时针方向从分组的
开始处数。
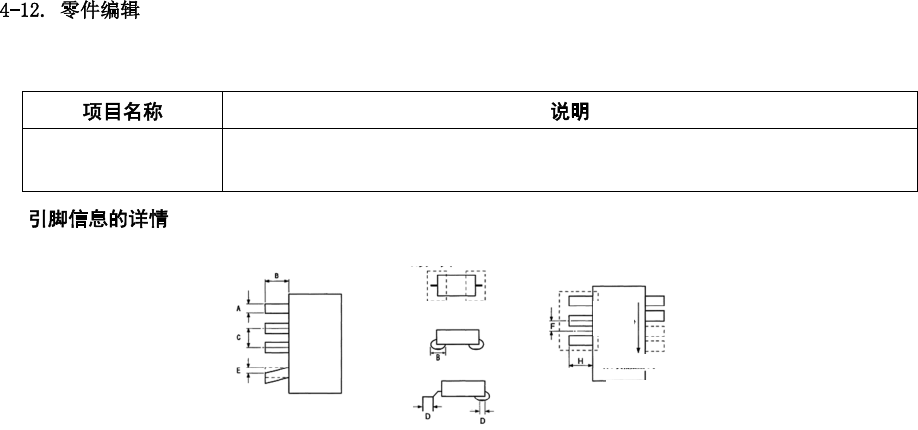
n
(a)
引脚宽度
(b)
引脚长度
(c)
引脚间距
(d)
接地面长度
(e)
引脚弯曲容许率
(f)
引脚偏移量
(g)
引脚尖端到本体的间隔
(h)
缺损个数
(i)
缺损起点
引脚参数 1 引脚参数 2
引脚间距 组中心
元件中心
J:欠缺根数:2
K:欠缺起点:3
220