00192673-01.pdf - 第42页
1 Indledning, Tekniske dat a Driftsvejledning SIPLACE F5/F5 HM 1.13 Oversigt over konstruktionsgrupper - bestykni ngshoveder Softwareversion SR.407.xx Udgave 01/2001 D K 42 1.13 Overs igt over konstr uktionsgrupper - bes…
Driftsvejledning SIPLACE F5/F5 HM 1 Indledning, Tekniske data
Softwareversion SR.407.xx Udgave 01/2001 DK 1.12 Oversigt over konstruktionsgrupper - portal
41
1.12.3 Tekniske data for X-aksen
1.12.4 Opbygning af Y-aksen
y-aksen består hovedsageligt af følgende hovedkonstruktionsgrupper: 1
– Y-3-faset servomotor (F
5
HM), jævnstrøm-servomotor (F
5
)
– Y-tandrem
– Y-føringssystem
– Y-aksemålesystem
1
Hver y-akse drives af en 3-faset servomotor. En anticrashkobling begrænser portalernes mulig-
hed for at kunne bevæge sig imod hinanden. 1
1.12.5 Tekniske data for Y-aksen
Drift 3-faset servomotor/tandrem (F
5
HM)
jævnstrøm-servomotor/tandrem (F
5
)
Max. hastighed 2,5 m/sec.
Bevægelsesvej 620 mm
Vejmålesystem lineær metalmålestok
Målestokslængde 646 mm
Opløsning 1,0 µm (F
5
HM)
2,5 µm (F
5
)
Drift 3-faset servomotor / tandrem (F
5
HM)
jævnstrøm-servomotor / tandrem (F
5
)
Max. hastighed 2,5 m/sec.
Portalernes bevægelsesvej 910 mm
Vejmålesystem lineære metalmålestokke
Målestokslængde 970 mm
Opløsning 1,0 µm (F
5
HM)
2,5 µm (F
5
)
1 Indledning, Tekniske data Driftsvejledning SIPLACE F5/F5 HM
1.13 Oversigt over konstruktionsgrupper - bestykningshoveder Softwareversion SR.407.xx Udgave 01/2001 DK
42
1.13 Oversigt over konstruktionsgrupper - bestyk-
ningshoveder
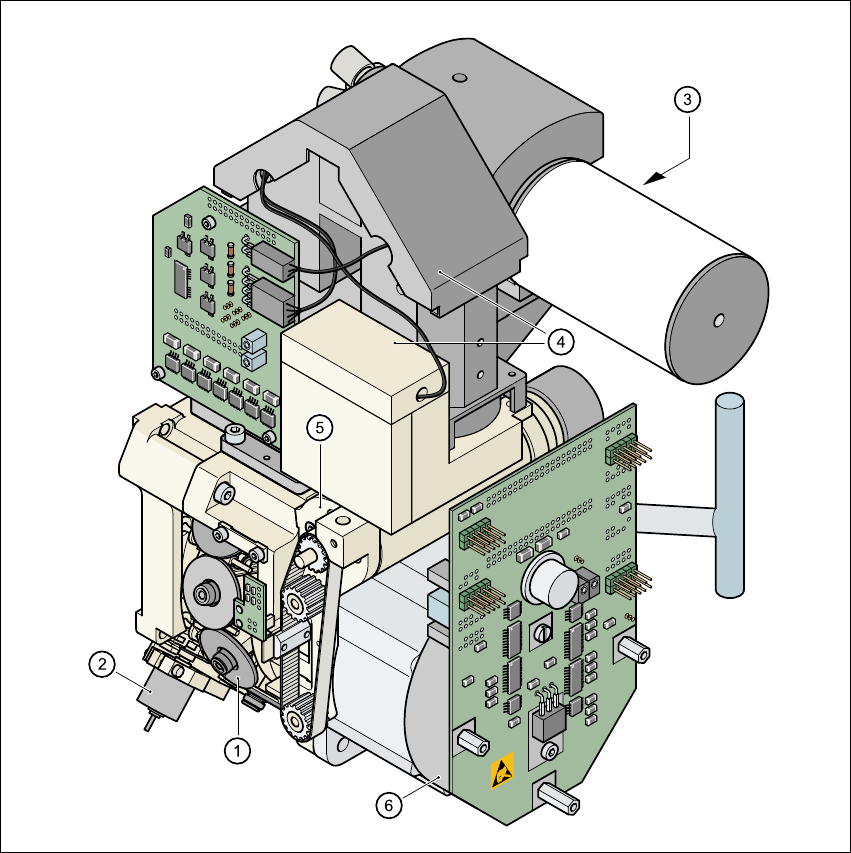
1.13.1 Opbygning af 12-segment-revolverhovedet
Fig. 1.13 - 1 Opbygning af 12-segment-revolverhovedet
(1) Stjerne med 12 pinolrør (2) Motor, ventilindstillingsdrev "fejlvare"
(3) Drejestation (4) Komponent-visionssystem
(5) Z-aksedrev (6) Stjernemotor
Driftsvejledning SIPLACE F5/F5 HM 1 Indledning, Tekniske data
Softwareversion SR.407.xx Udgave 01/2001 DK 1.13 Oversigt over konstruktionsgrupper - bestykningshoveder
43
Alle komponenter bestykkes med den samme takttid. Komponenten måles optoelektrisk med vi-
sionssystemet, før den bestykkes. 1
– Komponent-visionskameraet fremstiller et billede af den optagne komponent.
– Desuden fastlægges den nøjagtige position for komponenten.
– Husformen på den optagne komponent sammenlignes med den programmerede husform, så
komponenten kan identificeres. Ikke identificerede komponenter frasorteres som fejlvare.
– Drejestationen drejer komponenten i den nødvendige bestykningsposition.
1.13.2 Beskrivelse af 12-segment-revolverhovedet
– 12-segment-revolverhovedet arbejder iht. Collect & Place - princippet, hvilket betyder at kom-
ponenterne hentes af pipetterne ved hjælp af vakuum og anbringes blødt på det rigtige sted
på printkortet ved hjælp af blæseluft efter en komplet hentecyklus. Samtidigt kontrolleres va-
kuummet flere gange i pipetterne, så det er muligt at konstatere, om komponenterne også vir-
kelig er blevet hentet og anbragt korrekt.
– Z-aksens "lærenemme" sensorstop-funktion udligner printkort-ujævnheder, når komponen-
terne anbringes.
– Fejlbehæftede komponenter frasorteres som fejlvare og repareres på et senere tidspunkt i en
reparationskørsel.
1.13.3 Tekniske data - 12-segment- revolverhoved
Komponentspektrum 0402 til 18,7mm x 18,7mm inkl. BGA, µBGA, Flip-
Chip, TSOP, QFP, PLCC, SO til SO32, DRAM
Max. højde 6 mm
Min. benafstand 0,5 mm
Min. mål 0,5 mm x 1,0 mm
Max. mål 18,7 mm x 18,7 mm
Max. vægt 2 g
Max.bevægelse af z-akse 16 mm
Programmerbar påsætningskraft 2,4 til 5,0 N
Pipettetyper 9xx (F
5
HM), 7xx (F
5
)
Vinkelnøjagtighed ± 0,525° / 3 σ, ± 0,70° / 4 σ, ± 1,05° / 6 σ
Bestykningsnøjagtighed ± 67,5 µm / 3 σ, ± 90 µm / 4 σ, ± 135 µm / 6 σ