OM-1645-001_w.pdf - 第39页
20 OM-1645 11.4 基板移載と位置決め状態の確認 1004-001 (7) 透明カバーを開く。 注意 モータなどの負荷電源は OFF の状態ですが、装置内に手を 入れる段取り作業ですので、安全には十分注意してくださ い。 (8) 基板を軽く指で押し、バックアップピンの位置に問題がないことを 確認する。 (9) 透明カバーを閉じる。 (10) カバーロックスイッチを押し、スイッチを点灯させる。

19
OM-1645
11.4 基板移載と位置決め状態の確認
1004-001
11.4 基板移載と位置決め状態の確認
“生産運転”メニューの“基板移載”画面で基板移載と位置決め状態を確
認します。
手順
(1)“画面展開”に従い、“基板移載”画面を表示させる。
F21
(2)前工程より基板移載と位置決め状態の確認をするレーンに基板を搬
入する。
(3)イメージ表示されている位置決めコンベア 1 のブロックボタンを押
し、10 秒以内に操作パネルの[START]ボタンを押し、基板を移載す
る。
(4)基板が正常に移載でき、移載時に引っかかりや落下しないことを確
認する。
(5)“基板位置決め
L”の[ 実行 ]
ボタンを押し、10 秒以内に操作パネ
ルの[START]ボタンを押す。
( バックアップベースが上昇します。)
(6)カバーロックスイッチを押し、スイッチを消灯させる。
( 透明カバーのロックが解除されます。)
画面展開

20
OM-1645
11.4 基板移載と位置決め状態の確認
1004-001
(7)透明カバーを開く。
注意
モータなどの負荷電源は OFF の状態ですが、装置内に手を
入れる段取り作業ですので、安全には十分注意してくださ
い。
(8)基板を軽く指で押し、バックアップピンの位置に問題がないことを
確認する。
(9)透明カバーを閉じる。
(10)カバーロックスイッチを押し、スイッチを点灯させる。
21
OM-1645
12. パターンプログラム
1004-001
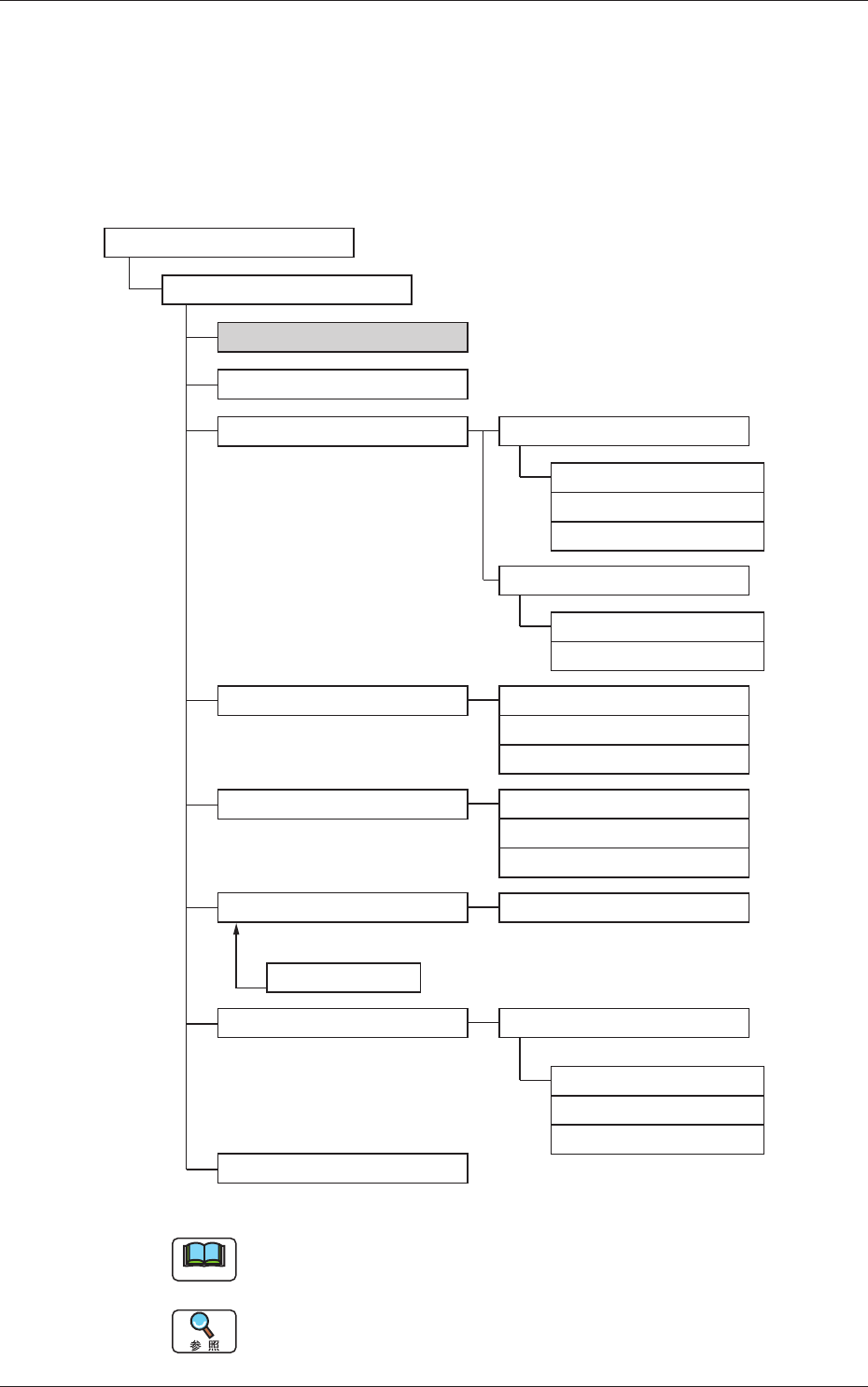
12. パターンプログラム
12.1 パターンプログラムの構成
デュアル搬送用のパターンプログラムは、次のようなデータで構成されて
います。
パターンプログラム
パターンプログラム名
共通
基板
オペレーション
制御
ノズル配置
部品配置
部品ライブラリ
部品 ID
装着
基板認識
制御
基板位置決め
搬送速度
ノズル配置
ノズルストッカ 1
ノズルストッカ 2
機能
基板認識マーク
動作
段取
段取
バックアップピン
ブロック 1(2)
Un
オフセット
P データ
O データ
吸着・装着順
パターンプログラムの構成図 F22
ノート
灰色で塗られたか所が、デュアル搬送対応で変更のある項目です。
デュアル搬送対応以外の説明については、“SIGMA-G52 巻2 章パター
ンプログラム”を参照してください。