SM421 Service Manual(Chi Ver1).pdf - 第182页
Samsung Component Placer SM421 Service Manual 4-66 Housing Ass’y 。 8. 从下往上插入 Ball spline , Ball spline 上组装接头后把弹簧连 接到 slidu body 。 9. 打开设备前面的 Main Switch ,启动 PC 。 10. 利用示教框,慢慢旋转替换的头部,通过 fly camera 确认喷嘴座的偏心旋转程 度。 微调假组装的 Ba…
Head Module
4-65
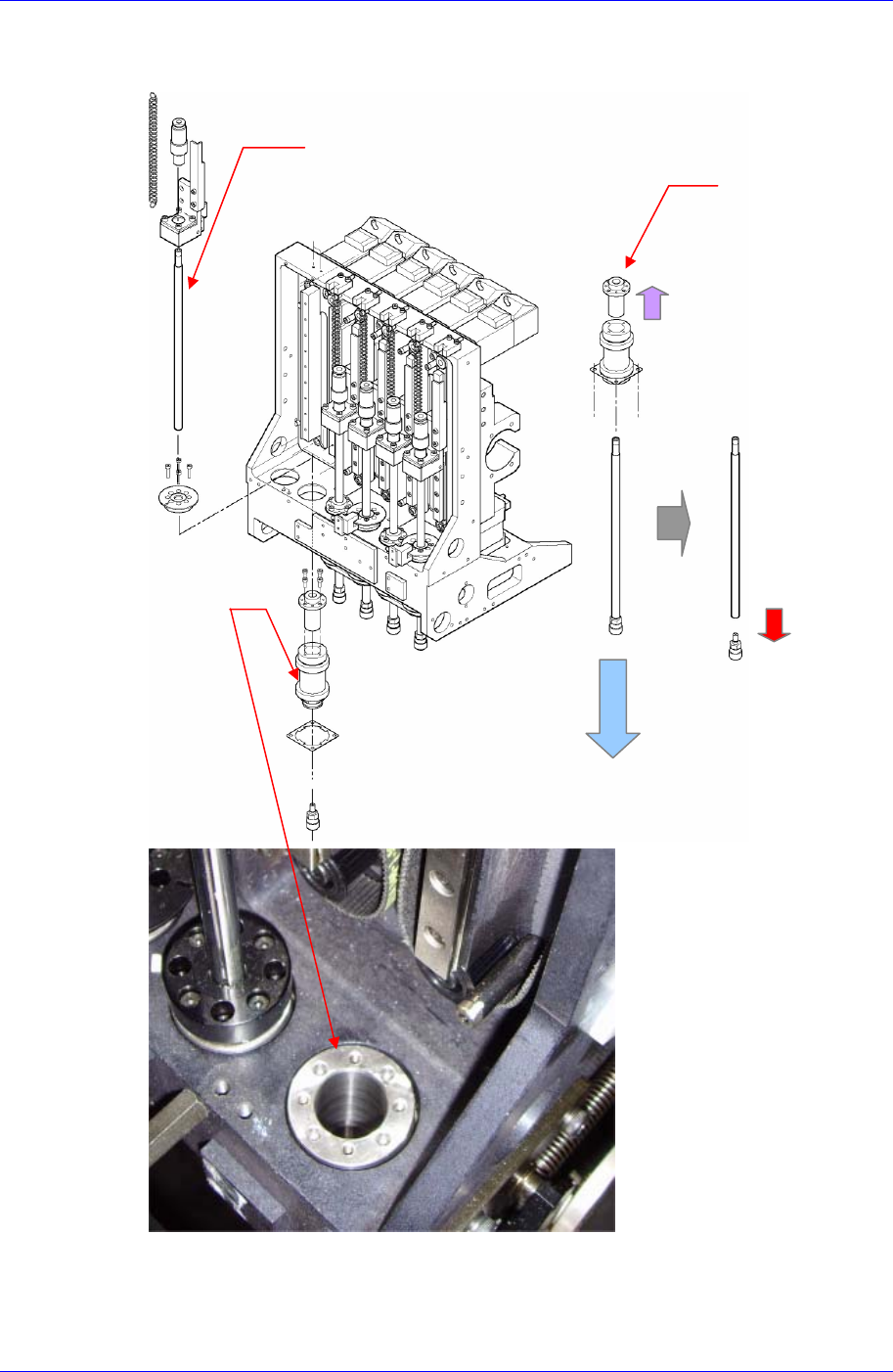
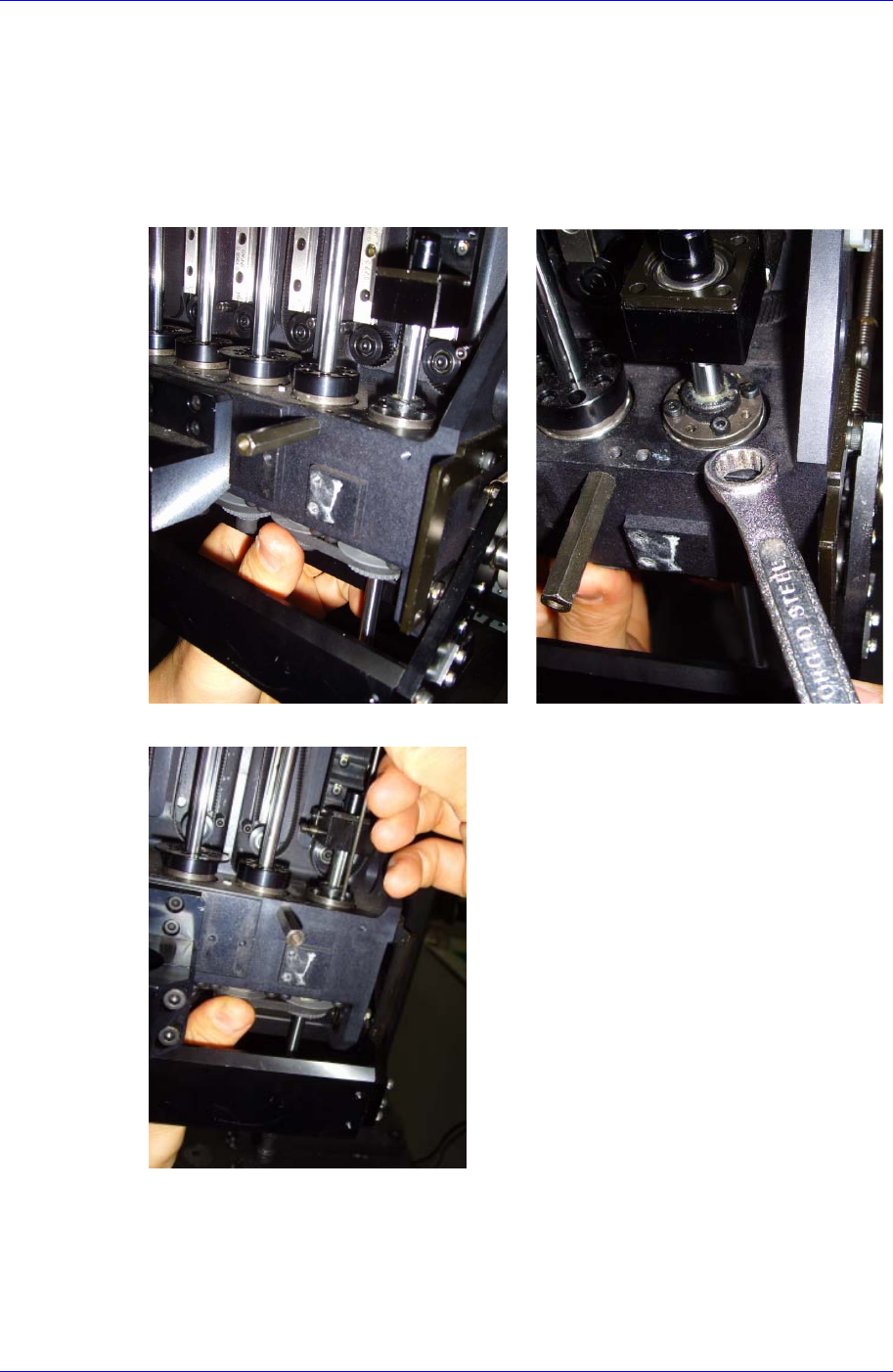
5. 向下推动Ball Spline进行分离后(A), 利用扳手分离Ball Spline和喷嘴座。然后
向上拉动Ball Spline Nut分离后替换成新的Ball Spline和Ball Spline Nut。
6. 把喷嘴座组装在Ball spline,插入Ball spline Nut。
组装喷嘴座时,请利用力矩扳手进行组装。连接力矩为 18 kgf.cm。.
7. 插入Ball spline Nut后利用固定螺丝(M2–4个),把Ball spline Nut组装在Spline
Ball Spline
Ball Spline Nut
A
C
B
Spline Housing
Ass’y
Samsung Component Placer SM421 Service Manual
4-66
Housing Ass’y。
8. 从下往上插入Ball spline,Ball spline上组装接头后把弹簧连接到slidu body。
9. 打开设备前面的Main Switch,启动PC。
10. 利用示教框,慢慢旋转替换的头部,通过fly camera确认喷嘴座的偏心旋转程
度。 微调假组装的Ball splineNut直到喷嘴座不偏心旋转为止。 (可以如下图
手动旋转,肉眼确认偏心程度,但不建议这么做。)
11. 完成微细调整,请固定好固定螺丝。
Head Module
4-67
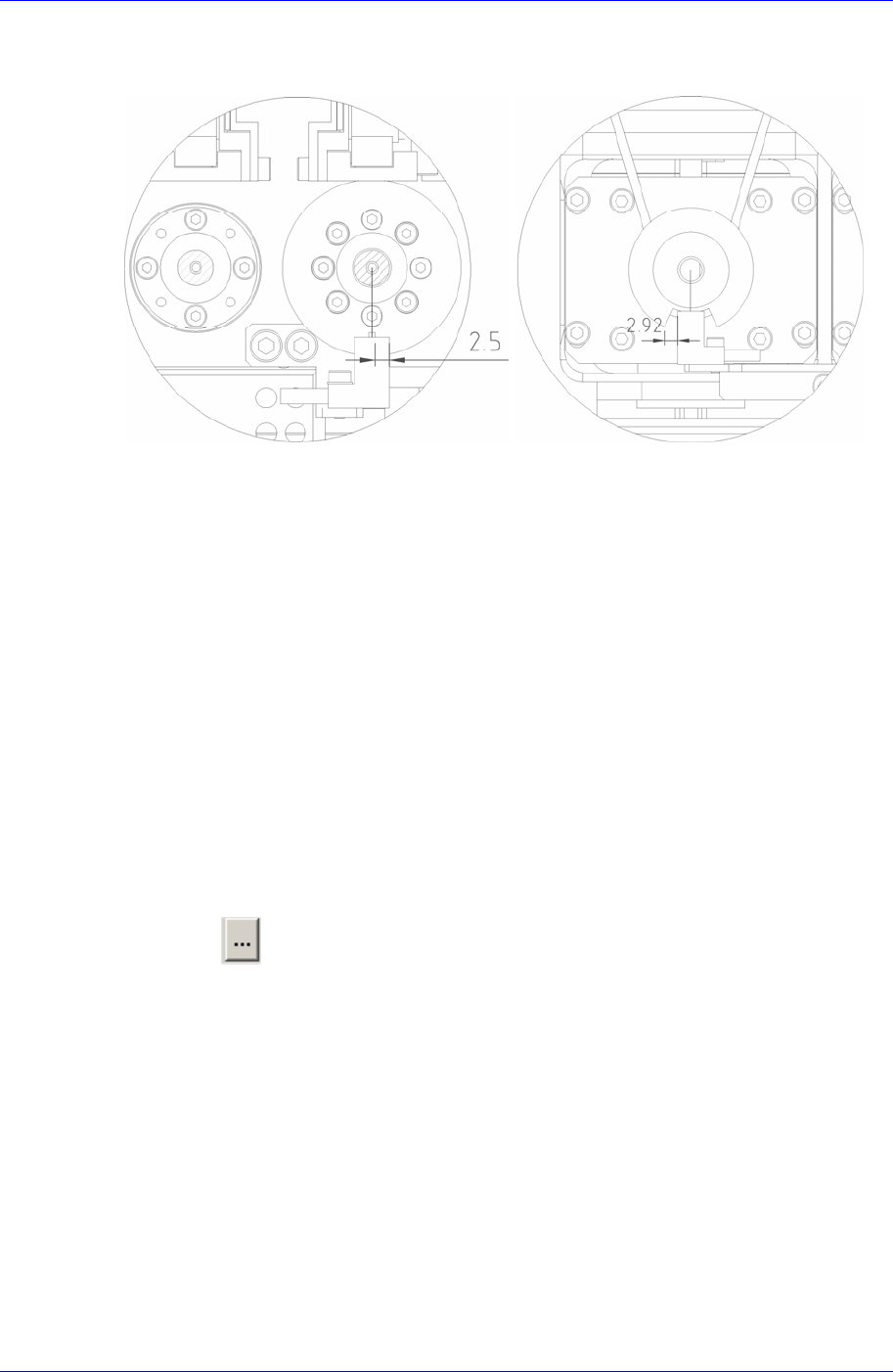
12. R轴传感器dog组装时,请参照下图的设置。
13. 完成组装后,确认Ball spline Nut周边有无污渍,利用真空清扫仪清扫干净。
如果 Ball spline Nut中流入污渍,影像设备性能。
14. 需要执行以下 Calibration作业。
Z Offset Calibration 执行 (请参照 “3.2.7.3 Head Z / R Offset Calibration (3-
27
页
)“ )
Nozzle Check 执行 (请参照 “3.5 Nozzle Check “ )
R Offset Calibration 执行 (请参照 “3.2.7.3 Head Z / R Offset Calibration (3-
27
页
)”)
Head Offset Calibration 执行 (请参照 “
<5.
测试
>
领域
指定要保存Test结果的文件名,开始进行Test。
<绘图> 领域
à
按钮
选择 Mapping 时使用的 Map File。是自动生成的文件名,请不要更改。
à <Start> 按钮
开始 Mapping
à <Test> 按钮
对 Mapping 结果执行 Test。自动搜索不能满足基准值的照明 Leve1 并
显示在结果文件。
必须在选择<Refine Mapping Result> 校验框的状态下执行Mapping。
状态表示
表示当前进行状况。
Camera (Test 或 Mapping完成的 Camera数) / (选定的 Camera 总个数。)
R 轴 home sensor dog
(Top View)
R 轴辅助传感器 dog
(Bottom View)