OM-1214-014_w.pdf - 第211页
Tg0984-ID-OP 3-15 1.7 パターンプログラムシミュレーション パターンプログラムの動作を確認する方法について説明します。 パターンプログラムシミュレーションは、吸着順 / 装着順データを 元にシミュレーションを行います。 パターンプログラムシミュレーションの前には、必ず最適化処理を 行い、吸着順 / 装着順データを更新してください。 ノート GXH シリーズのシミュレータでは、Table7-1 に示して…

Tg0984-ID-OP
3-14
1.6.9 パターンプログラム最適化の実行
手順
(1)“GXH パターンプログラム最適化ソフト”画面で [ 最適化設
定 ] タブを押し、最適化の設定を行います。
(2)リソースによる制限を行う場合は、“リソース設定”画面
で設定を行います。
(3) “ノズルストッカー配置”画面で、ノズルストッカーの配
置を確認します。
(4)“ヘッド上ノズル配置”画面で、ヘッド上のノズル配置を
確認します。
(5) [ 装置オプション ] タブを押し、装置設定を確認します。
(6) [ 最適化 ] ボタンを押します。
最適化が実行され、結果が“パターンプログラム”編集画
面に表示されます。
1.6パターンプログラムの最適化
0709-008
Tg0984-ID-OP
3-15
1.7 パターンプログラムシミュレーション
パターンプログラムの動作を確認する方法について説明します。
パターンプログラムシミュレーションは、吸着順 / 装着順データを
元にシミュレーションを行います。
パターンプログラムシミュレーションの前には、必ず最適化処理を
行い、吸着順 / 装着順データを更新してください。
ノート
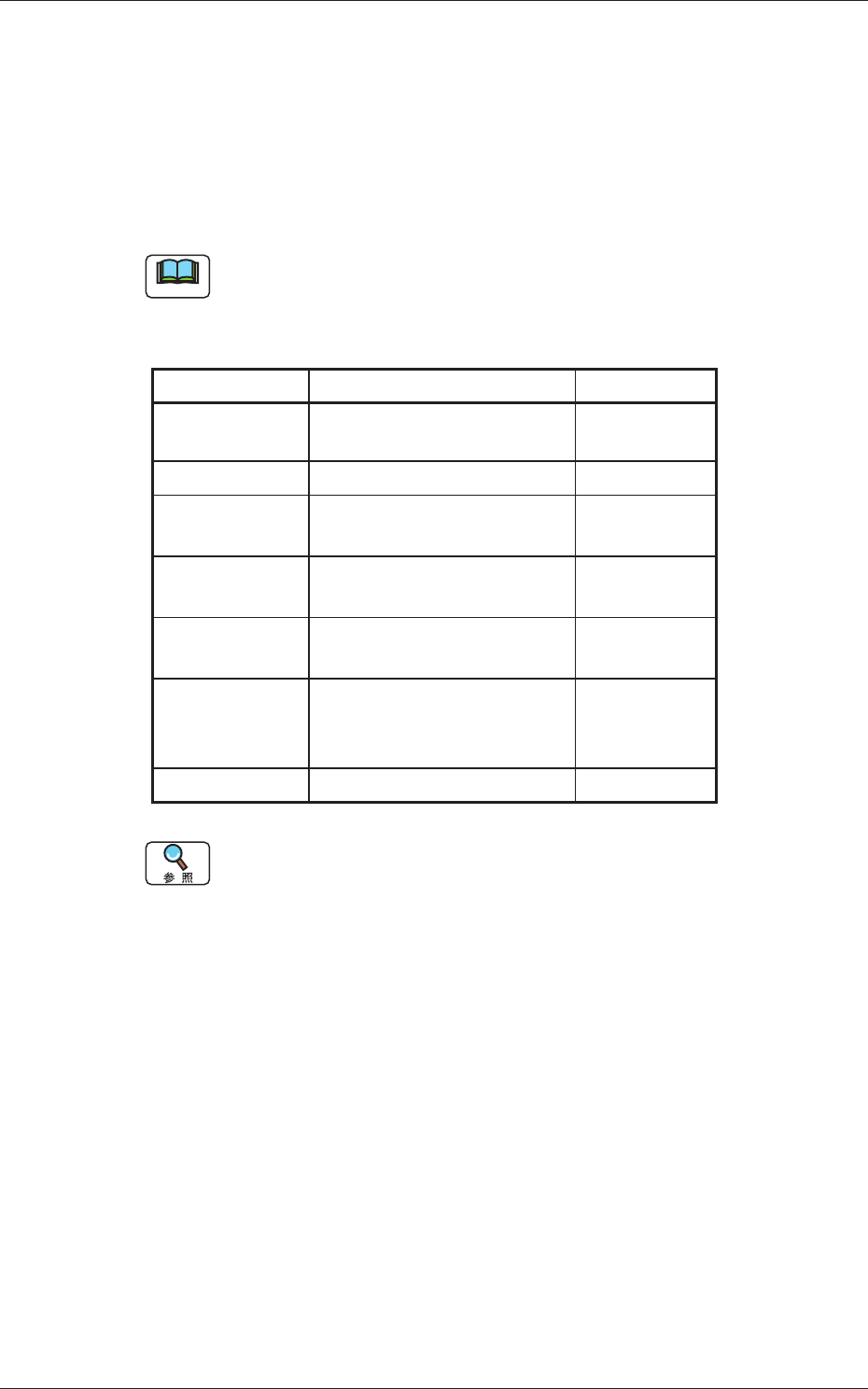
GXH シリーズのシミュレータでは、Table7-1 に示してある運転条
件下で生産運転を行った場合のシミュレーション値を表示します。
Table7-1
運転方法指定については、GXH シリーズ本体取説第 2 巻 2 章“4.3
運転方法指定”を、認識画面については、GXH シリーズ本体取説
第 2 巻 1 章“3. 認識画面”を参照してください。
1.7パターンプログラムシミュレーション
設定画面 設定項目 設定内容
運転方法指定
運転方法指定
運転方法指定
運転方法指定
運転方法指定
装着後
使用しない
指定しない
使用しない
チェック無し
運転方法指定 使用しない
部品廃棄モード
( ステージ 1、ステージ 2)
吸着前ノズル確認機能
( 機能設定 )
運転速度減速指定
( モード )
ノズルエアブロー
( 機能設定 )
認識画像表示設定
( 画像表示 : 基板認識カメラ、
部品認識カメラ )
フィーダポケット認識
認識画面
マルチを選択
0607-006
Tg0984-ID-OP
3-16
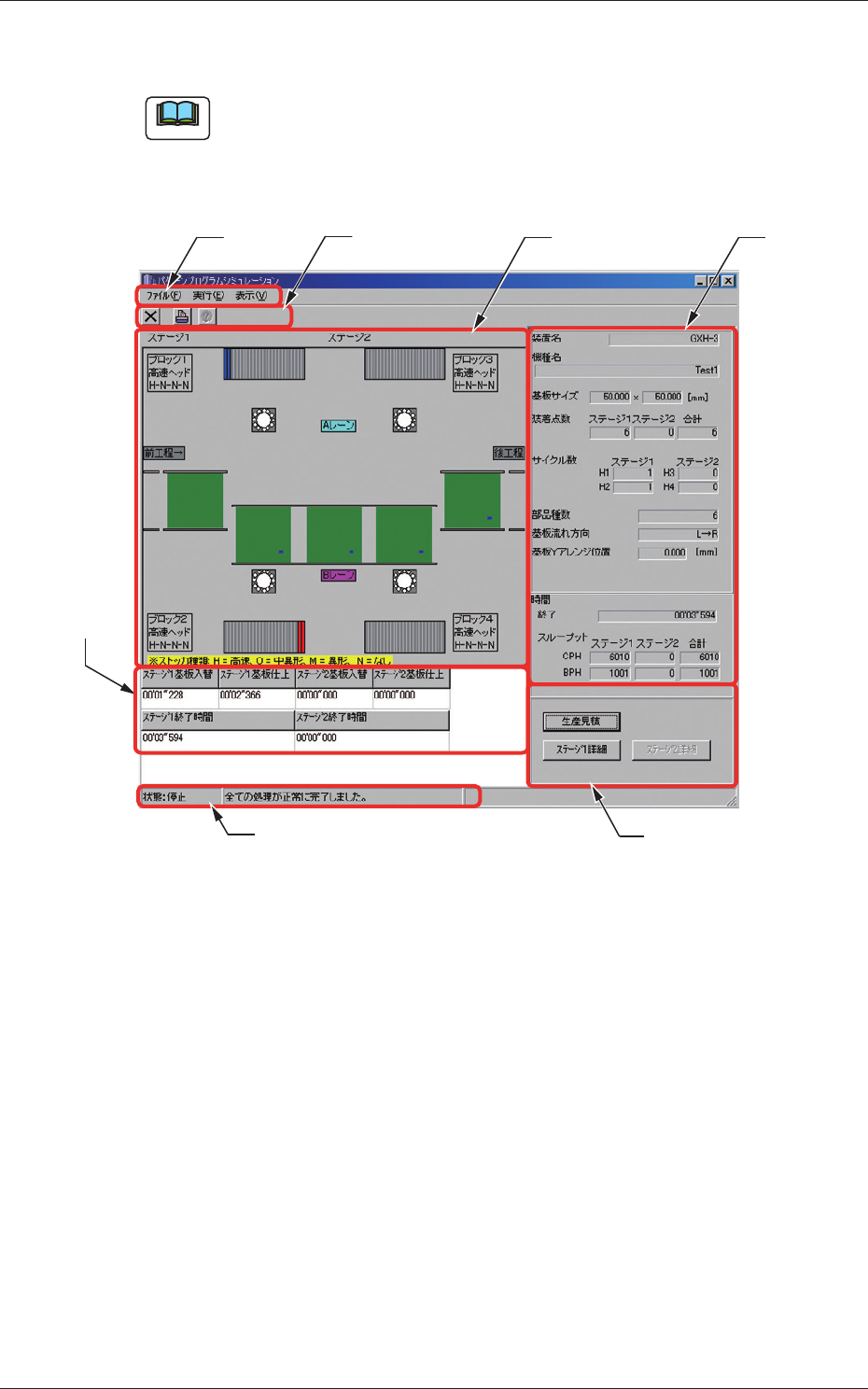
“パターンプログラム”編集画面で、[ ツール ] メニューの [ シミュレー
ション ] を選択すると、以下の画面が表示されます。
ノート
パターンプログラムにエラーがある場合は、“パターンプログラム
シミュレーション”画面は表示されません。
“パターンプログラム”編集画面に“エラー”ウィンドウが追加表
示されます。
[1]
[6]
[2]
[3] [4]
[7]
[5]
Fig.C5 “パターンプログラムシミュレーション”画面
[1]メニューバー
メニューバーには、操作を行うためのコマンドを機能別に分類
したメニューが並んでいます。
メニューを押すと、そのメニューに含まれるコマンドの一覧が
プルダウン表示されます。
[2]ツールバー
よく使われる機能がアイコンで表示されています。
[3]装置イメージ
装置のイメージが表示されます。
1.7パターンプログラムシミュレーション
0709-006