HS50_advance_level 1_20200522_221201 (1).pdf - 第304页
\ ## File converted by makonv at Wed Nov 21 13:37:20 2001 \ { \ Datei \ "REAL.MA"| this File is changed by reconfiguration / calibration with SITEST \ Version \ "31.503.011119_E"| \ Maschinentyp \ &qu…
\ Istpos Fach 7 \ 1518125,
\ X-Istpos \ 1347292,
\ Y-Istpos \ 873!
\ Z-Istpos \
\ Istpos Fach 8 \ 1440157,
\ X-Istpos \ 1347251,
\ Y-Istpos \ 875!
\ Z-Istpos \
\ Istpos Fach 9 \ 1362137,
\ X-Istpos \ 1347240,
\ Y-Istpos \ 873!
\ Z-Istpos \
\ Istpos Fach 10 \ 1284140,
\ X-Istpos \ 1347199,
\ Y-Istpos \ 879>
\ Z-Istpos \
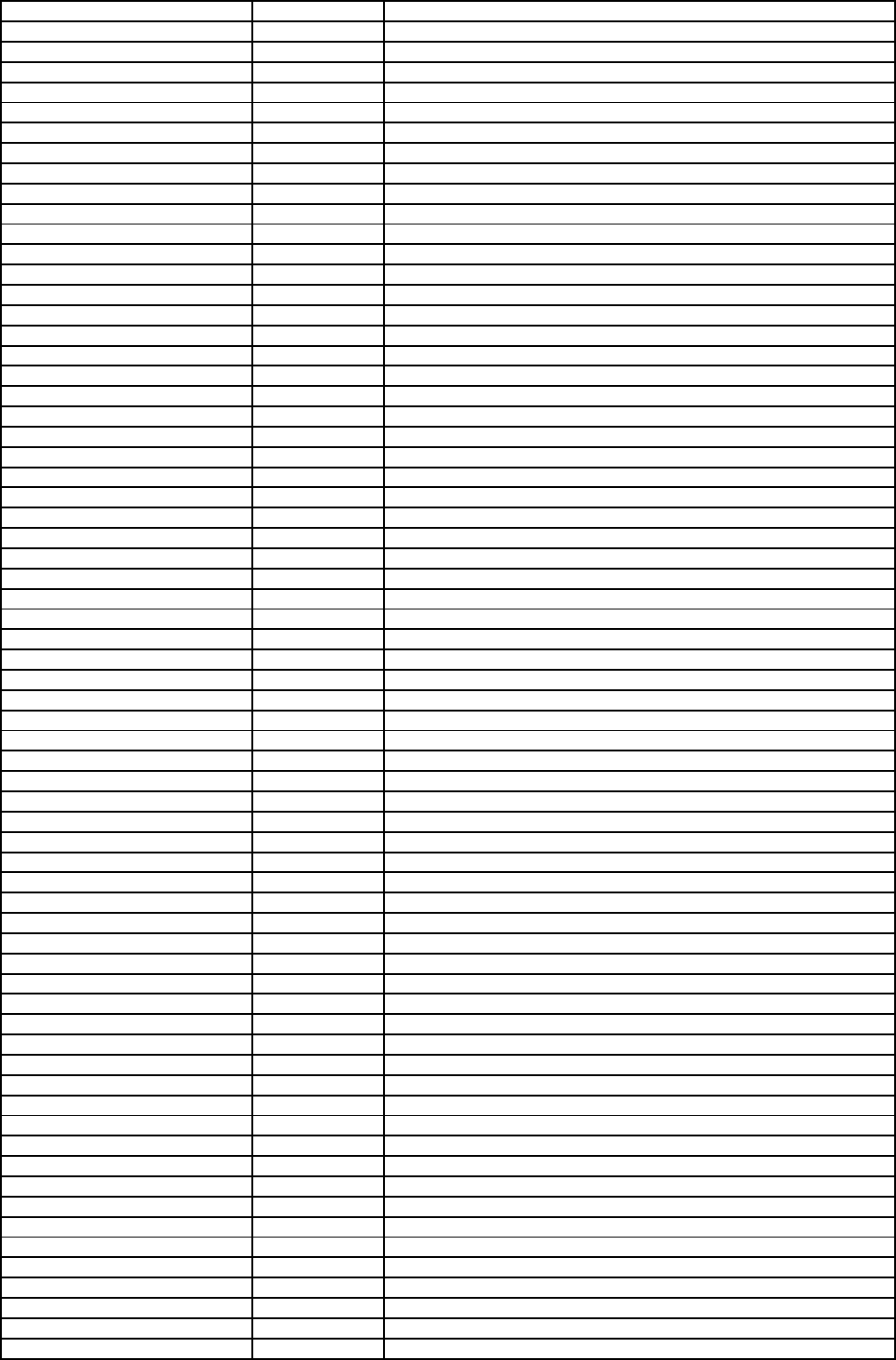
\ Vermessung Pipettenwechsler 4 \
nozzle changer gantry
4
\ Istpos Abstreifen 1 \ 419635,
\ X-Istpos \ 1483711,
\ Y-Istpos \ 931!
\ Z-Istpos \
\ Istpos Abstreifen 2 \ 0,
\ X-Istpos \ 0,
\ Y-Istpos \ 0,
\ Z-Istpos \
\ Istpos Fach 1 \ 758648,
\ X-Istpos \ 1410884,
\ Y-Istpos \ 893!
\ Z-Istpos \
\ Istpos Fach 2 \ 680663,
\ X-Istpos \ 1410828,
\ Y-Istpos \ 890!
\ Z-Istpos \
\ Istpos Fach 3 \ 602678,
\ X-Istpos \ 1410750,
\ Y-Istpos \ 886!
\ Z-Istpos \
\ Istpos Fach 4 \ 524666,
\ X-Istpos \ 1410726,
\ Y-Istpos \ 886!
\ Z-Istpos \
\ Istpos Fach 5 \ 446664,
\ X-Istpos \ 1410705,
\ Y-Istpos \ 886!
\ Z-Istpos \
\ Istpos Fach 6 \ 758464,
\ X-Istpos \ 1346851,
\ Y-Istpos \ 891!
\ Z-Istpos \
\ Istpos Fach 7 \ 680484,
\ X-Istpos \ 1346761,
\ Y-Istpos \ 891!
\ Z-Istpos \
\ Istpos Fach 8 \ 602466,
\ X-Istpos \ 1346661,
\ Y-Istpos \ 887!
\ Z-Istpos \
\ Istpos Fach 9 \ 524480,
\ X-Istpos \ 1346558,
\ Y-Istpos \ 884!
\ Z-Istpos \
\ Istpos Fach 10 \ 446462,
\ X-Istpos \ 1346515,
\ Y-Istpos \ 885
\ Z-Istpos \
}
Edition 1.0 3 PPW_VERM_MA_e.xls PPW_VERM.MA SD EA1 S GC Training
\ ## File converted by makonv at
Wed Nov 21 13:37:20 2001 \
{
\ Datei \
"REAL.MA"|
this File is changed by reconfiguration / calibration with SITEST
\ Version \
"31.503.011119_E"|
\ Maschinentyp \
"HS50"|
\ MA_Positionen \
A
ll values in µm
\ MA Nullpunkt_x_pg1
\
739500,
X
-coordinate Ma-0-point at fixed Transport rail in working area BB 1
\ MA Nullpunkt_y_pg1 \
718000,
Y- coordinate right double transport | or right-single transport|
\ MA Nullpunkt_x_pg2
\
1303500,
X
-coordinate Ma-0-point at fixed Transport rail in working area BB 2
\ MA Nullpunkt_y_pg2 \
718000,
Y- coordinate right double transport | or right-single transport | identical to BB1
\ Service_Pos_PG1P1_x \
600000,
A
fter movement to Service pos.the axis is disabled by SW (Do not mix up this
Service pos. with the waiting positon taken from IDEAL.MA) value for Gantry 4
\ Service_Pos_PG1P1_y \
1580000,
A
fter movement to Service pos.the axis is disabled by SW (Do not mix up this
Service pos. with the waiting positon taken from IDEAL.MA) value for Gantry 4
\ Service_Pos_PG1P2_x \
600000,
A
fter movement to Service pos.the axis is disabled by SW (Do not mix up this
Service pos. with the waiting positon taken from IDEAL.MA) value for Gantry 1
\ Service_Pos_PG1P2_y \
320000,
A
fter movement to Service pos.the axis is disabled by SW (Do not mix up this
Service pos. with the waiting positon taken from IDEAL.MA) value for Gantry 1
\ Service_Pos_PG2P1_x \
1400000,
\ Service_Pos_PG2P1_y \
1580000,
values valid for gantry 3
\ Service_Pos_PG2P2_x \
1400000,
\ Service_Pos_PG2P2_y \
320000,
values valid for gantry 2
\ Abwurf_Pos_P11_x
\
761000,
P11 mean portal group 1; left portal X-reject coordinate for gantry 4
\ Abwurf_Pos_P11_y \
1582000,
Yreject coordinate for gantry 4
\ Abwurf_Pos_P12_x
\
761000,
P12 mean portal group 1 right portal X-reject coordinate for gantry 1
\ Abwurf_Pos_P12_y \
333000,
Yreject coordinate for gantry 1
\ Abwurf_Pos_P21_x
\
1270000,
P21 mean portal group 2 left portal X-reject coordinate for gantry
3
\ Abwurf_Pos_P21_y \
1582000,
Yreject coordinate for gantry 3
\ Abwurf_Pos_P22_x
\
1270000,
P22 mean portal group 2 right portal X-reject coordinate for gantry
2
\ Abwurf_Pos_P22_y \
333000,
Yreject coordinate for gantry 2
\ Max_Abhol_Pos_PG1P1_y
\
1482500,
Minimum Y-position gantry axis Y4 can move to without placement enable
\ Max_Abhol_Pos_PG1P2_y
\
422200,
Maximum Y-position gantry axis Y1 can move to without placement enable
\ Max_Abhol_Pos_PG2P1_y \
1282500,
minimum position without placement enable for Y-gantry 3. because of 180° turned
gantries in BB2 is this value different to ganty 4
\ Max_Abhol_Pos_PG2P2_y \
422200,
maximum position without placement enable for Y-gantry 2. because of 180° turned
gantries in BB2 is this value different to ganty 1
\ RuestPosition_P1_x \
600000,
X
1-set up position. X-set up position could be anywhere
\ RuestPosition_P1_y \
780000,
Y1-set up position. Y-set up positions are definetly in the placement area. Therefor
the gantry move in slow motion to this coordinates.
\ RuestPosition_P2_x \
1400000,
X
2-set up position. X-set up position could be anywhere
\ RuestPosition_P2_y \
740000,
Y2-set up position. Y-set up positions are definetly in the placement area. Therefor
the gantry move in slow motion to this coordinates.
\ RuestPosition_P3_x \
1400000,
X
3-set up position. X-set up position could be anywhere
\ RuestPosition_P3_y \
1130000,
Y3-set up position. Y-set up positions are definetly in the placement area. Therefor
the gantry move in slow motion to this coordinates.
\ RuestPosition_P4_x \
600000,
X
4-set up position. X-set up position could be anywhere
\ RuestPosition_P4_y \
1200000,
Y4-set up position. Y-set up positions are definetly in the placement area. Therefor
the gantry move in slow motion to this coordinates.
\ ParkPosition_Offset_x \
100000,
offset from the SW-Limits to operate the gantries in a save way with SITEST
working area BB 1
working area BB 2
Gantry 4 is
Gantry P1 at
Portalgroup PG1
S20 ä
Gantry 1 is
gantry P2 at
Portalgroup PG1
Gantry 2 is
Gantry P2 at
Portalgroup PG2
S20 ä
Gantry 3 is
Gantry P1 at
Portalgroup PG2
S20 ähl i
Edition 1.0 1 REAL_MA_e.xls REAL.MA SD EA1 S GC Training
\ ParkPosition_Offset_y \
30000,
offset from the SW-Limits to operate the gantries in a save way with SITEST
\ Minimaler_Kopfabstand_y \
350000,
Minimal sleeve- sleeve distance of the placement head on the gantries
\ Breitenverstellung
_Referenzwert_1 \
750037,
Width adjustment bero position for right Transport, calibrated with gantry 2 at a
100mm wide adjusted Transport rail
\ Breiten
verstellung_Referenzwert_2 \
1001776,
Width adjustment bero position for left Transport, calibrated with gantry 2 at a
100mm wide adjusted Transport rail
\ Breitenverstellung_Offset \
171133,
\ Offset _z0_Transp_Unterkante \
7000,
coordinate to calculate the PCB-bottomside and following the placement height
\ Delta
_Best_Nest_x_vorne_rechts \
787500,
BB1 Standard-X-coordinate PCB-reference corner in the right Transport track of a
right double or single transport
\ Delta
_Best_Nest_y_vorne_rechts \
722125,
BB1 Standard-Y-coordinate PCB-reference corner in the right Transport track of a
right double or single transport
\ Delta _Best_Nest_x_vorne_links
\
787257,
BB1 Standard-X-coordinate PCB-reference corner in the left Transport track of a
right double transport
\ Delta
_Best_Nest_y_vorne_links \
973670,
BB1 Standard-Y-coordinate PCB-reference corner in the left Transport track of a
right double transport
\ Delta
_Best_Nest_x_hinten_rechts \
1624125,
BB2 Standard-X-coordinate PCB-reference corner in the right Transport track of a
right double or single transport
\ Delta
_Best_Nest_y_hinten_rechts \
722320,
BB2 Standard-Y-coordinate PCB-reference corner in the right Transport track of a
right double or single transport
\ Delta
_Best_Nest_x_hinten_links \
1623415,
BB2 Standard-X-coordinate PCB-reference corner in the left Transport track of a
right double transport
\ Delta
_Best_Nest_y_hinten_links \
973925,
BB2 Standard-Y-coordinate PCB-reference corner in the left Transport track of a
right double transport
\ Koplanaritaet_1_x
\
0,
not used in a 503.XX SW machine type
\ Koplanaritaet_1_y \
0,
not used in a 503.XX SW machine type
\ Koplanaritaet_1_z \
0,
not used in a 503.XX SW machine type
\ Koplanaritaet_2_x
\
0,
not used in a 503.XX SW machine type
\ Koplanaritaet_2_y \
0,
not used in a 503.XX SW machine type
\ Koplanaritaet_2_z \
0,
not used in a 503.XX SW machine type
\ IC-Abwurfposition_1_x
\
0,
not used in a 503.XX SW machine type
\ IC-Abwurfposition_1_y
\
0,
not used in a 503.XX SW machine type
\ IC-Abwurfposition_1_z
\
0,
not used in a 503.XX SW machine type
\ IC-Abwurfposition_2_x
\
0,
not used in a 503.XX SW machine type
\ IC-Abwurfposition_2_y
\
0,
not used in a 503.XX SW machine type
\ IC-Abwurfposition_2_z
\
0,
not used in a 503.XX SW machine type
\ SP1_Marke1_Pos_x_soll
\
428950,
nominal value for SITEST to calibrate X-coordinate feeder table 1 track 1
\ SP1_Marke1_Pos_y_soll \
365750,
Y-coordinate feeder table 1 track 1
\ SP2_Marke1_Pos_x_soll \
1266450,
X
-coordinate feeder table 2 track 1. From now only 1 nominal position of a feeder
table is defined. The 2 fiducial is determined with a Matrix.
\ SP2_Marke1_Pos_y_soll \
365750,
Y-coordinate feeder table 2 track 1. From now only 1 nominal position of a feeder
table is defined. The 2 fiducial is determined with a Matrix.
\ SP3_Marke1_Pos_x_soll \
1614050,
X
-coordinate feeder table 3 track 1 Xnominal 31 Note:
NEVER change this nominal coordiates. Sitest use this coordinates to move to the
fiducial for feeder table position calibration. If you change this calibration may work
but the correction factors AX BX...VY are wrong to pick up components from the
feeders!!!
\ SP3_Marke1_Pos_y_soll \
1545750,
Y-coordinate feeder table 3 track 1 Xnominal 3
2
\ SP4_Marke1_Pos_x_soll
\
776550,
X
-coordinate feeder table 4 track 1 Xnominal 41
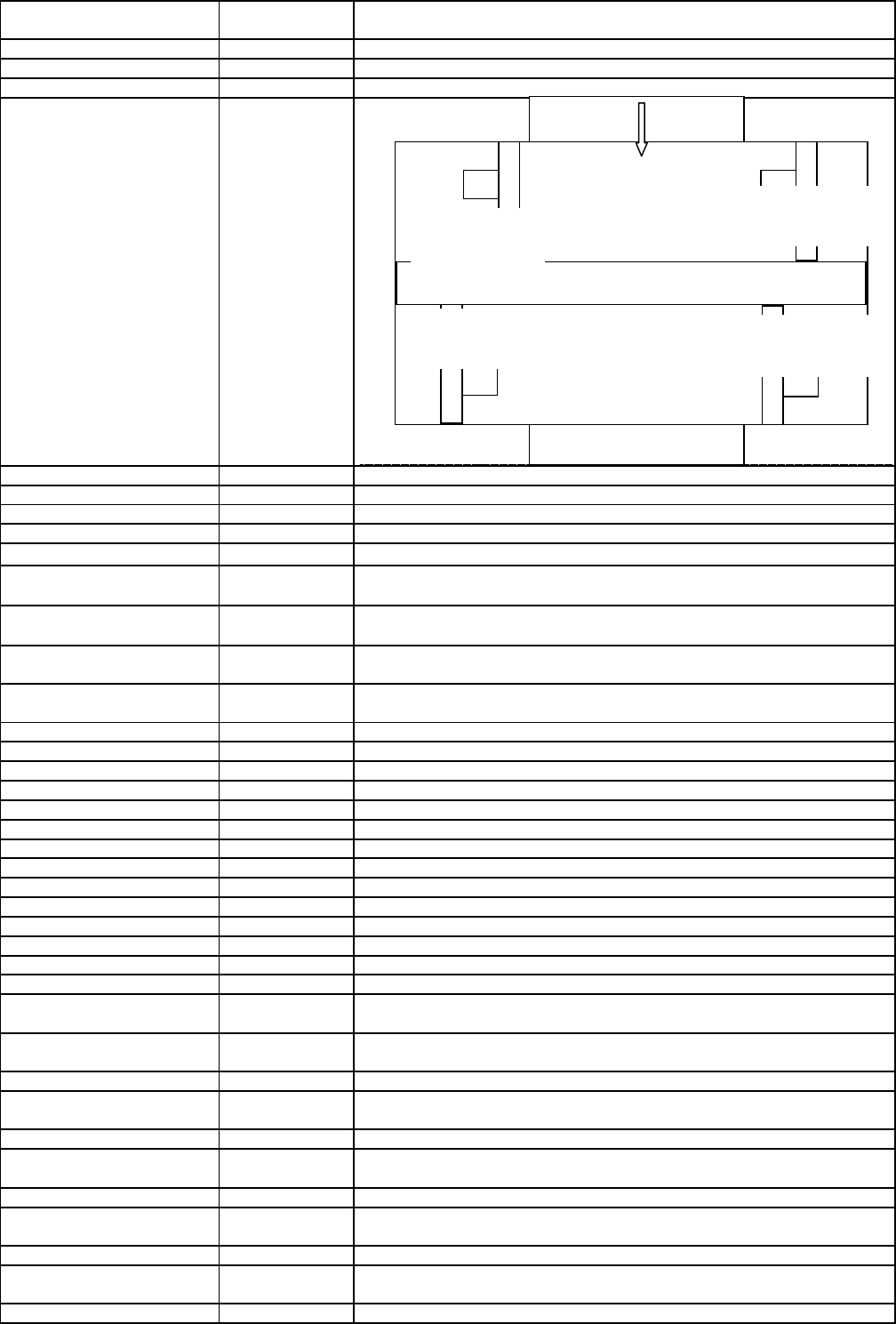
M1 M2
feeder table1
M1 M2
feeder table2
feeder table3
M2 M1
feeder table4
M2 M1
Edition 1.0 2 REAL_MA_e.xls REAL.MA SD EA1 S GC Training