HS50_advance_level 1_20200522_221201 (1).pdf - 第66页
06/2002 E dition Studen t Guide H S-50 Advance d I 2 Ov erview 36 2.15 Control str ucture F ig. 2. 15 - 1 Co mpo ne nts o f th e SIPL ACE LA N 2.15.1 Line Co mputer o r Siplace P r o compu ter F ig. 2. 15 - 2 Lin e Com p…
Student Guide HS-50 Advanced I 06/2002 Edition
2 Overview
35
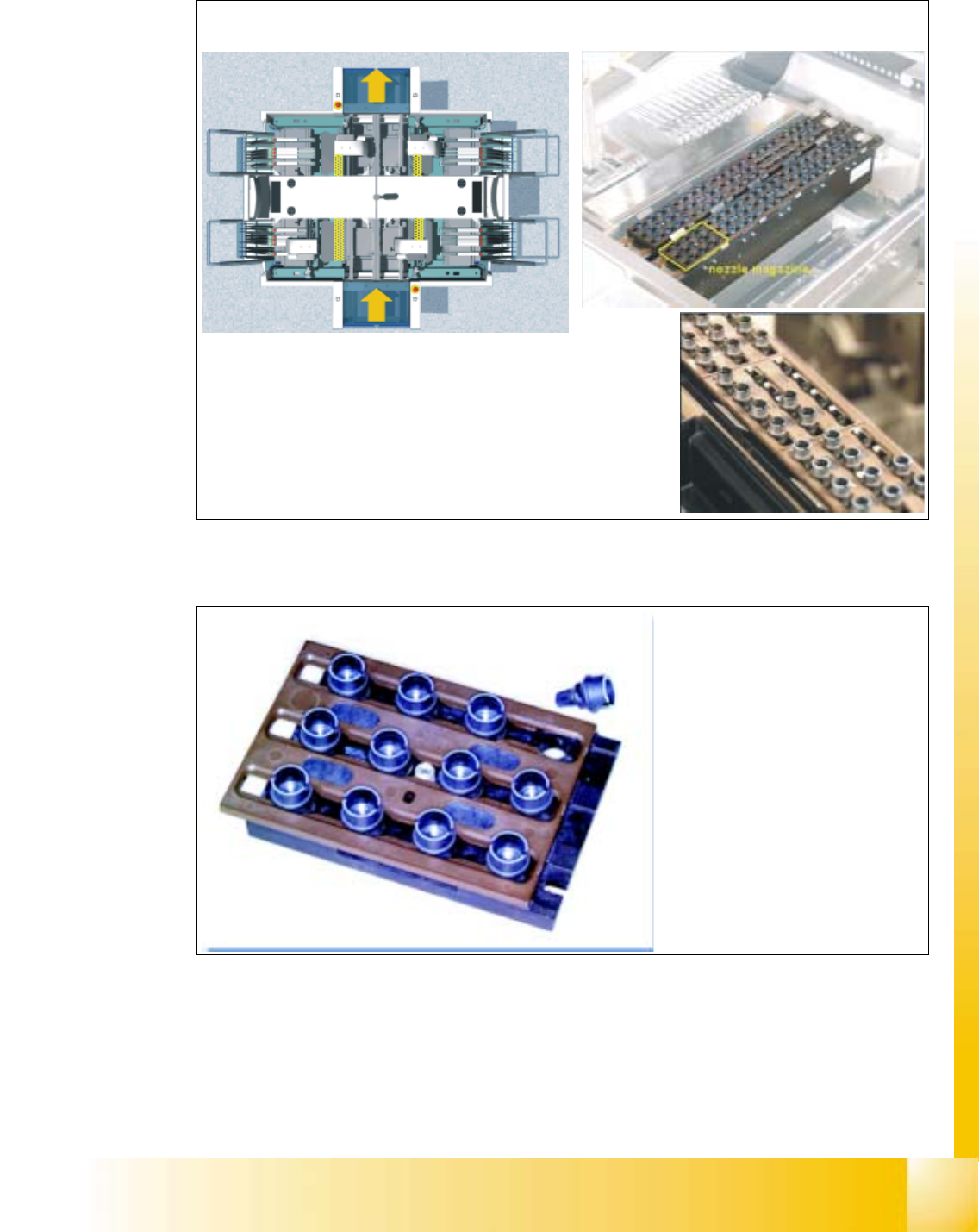
2.14 Nozzle Changer
Fig. 2.14 - 1 Positoin of nozzle changer
2.14.1 Nozzle Changer magazine
Fig. 2.14 - 2 Nozzle changer magazine
Top view Nozzle changer
The nozzle changer (shown here as a pair in sector 4)
cinsists of 2X5 magazines containing nozzles of various
sizes. These nozzles can be replaced automatically depend-
ing on the placement program.
Each magazine contains twelve
identical nozzle, which means that
all twelve sleeves can be provided
with the same nozzles
06/2002 Edition Student Guide HS-50 Advanced I
2 Overview
36
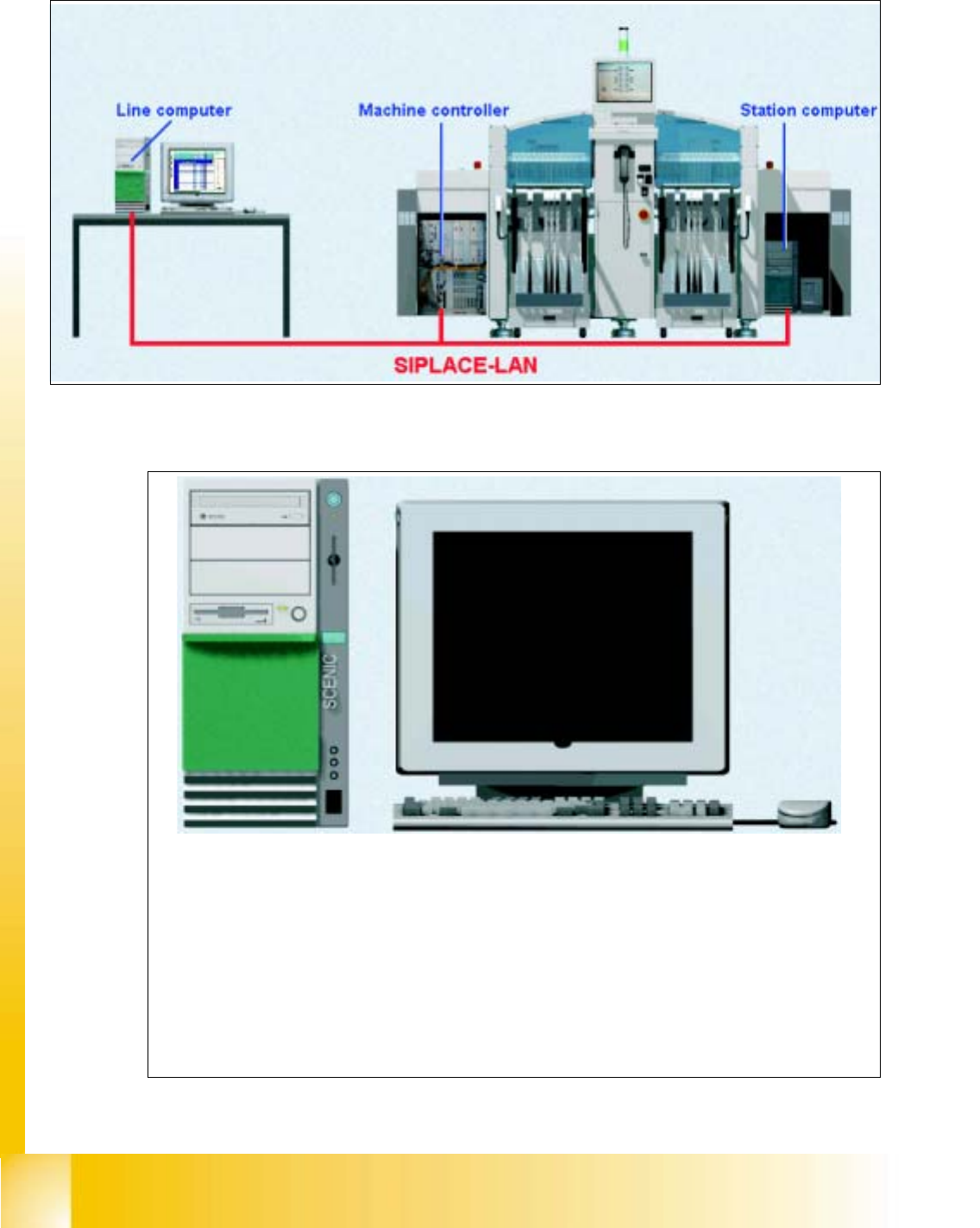
2.15 Control structure
Fig. 2.15 - 1 Components of the SIPLACE LAN
2.15.1 Line Computer or Siplace Pro computer
Fig. 2.15 - 2 Line Computer
The linie computer/ Siplace Pro computer and the overlying software provides the following
functions:
- Configuration of the placement machines and lines - Creation of placement programs
- Optimization of placement sequences - Line control
- Production data aquisition - Data management
- Interface to the customer LAN
Student Guide HS-50 Advanced I 06/2002 Edition
2 Overview
37
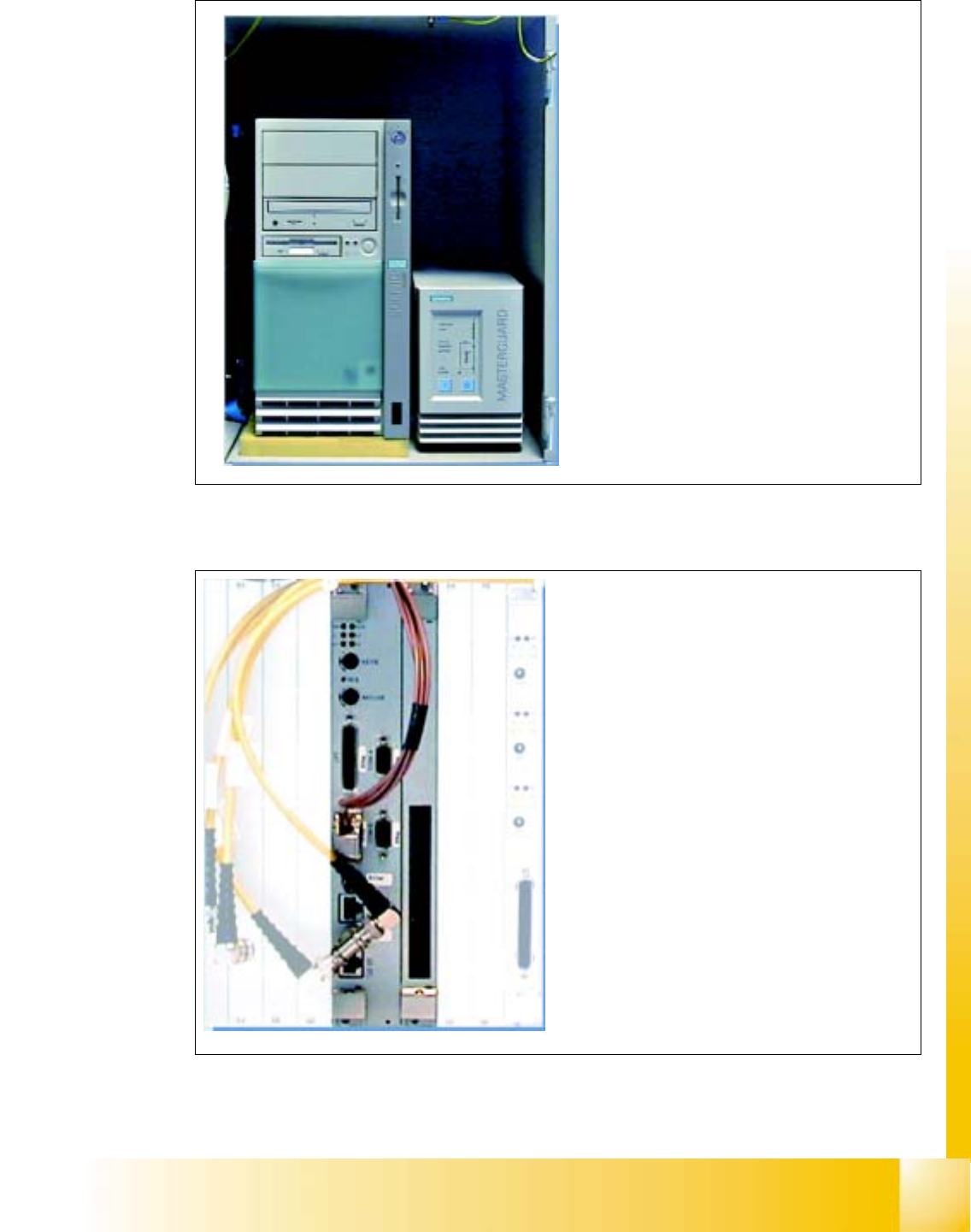
2.15.2 Station Computer
Fig. 2.15 - 3 Station computer
2.15.3 Machine Controller
Fig. 2.15 - 4 Machine controller
The station computer is ca Pentium sys-
tem running Windows NT 4.0.
It provides the following functions:
- Provision of a multilingual graphical
user interface
- Management of the machine data
- Teaching of vision data
- Communication interface between the
line computer and the machine ontroller
The machine controller is an industrial PC
running RMOS, a realtime operating system
based on DOS.
In conjunction with the axis control cards, the
CAN cards and the vision system, it controls the
entire placement sequence-
It provides the following functions
- Control of all axis sequences
- Control of the vision system
- Monitoring of all input and output functions
- Implementation of alll operator input