KE-2000R_InstructionManual_C_Rev00说明.pdf - 第40页
第 1 部 基本编 第 1 章 设备概要 1-19 注1 : 在整个贴片范 围内, 激光识别校正的精度以偏 差的± 3s 值以内为标准值, 偏差的 平均值应在理论坐标±标准值的 40% 以内( Cpk=1 : ±70μ m ) 。 注2 : 图像识别校正时的精度应设定为元件基准标记或基板基准标记的绝对值。 注3 : QFP 、 SOP 、 SOT 等引脚的站立部分或元件 体的中心位置 (图中 S C )与引 脚的中 心位置(图 中 L …
第 1 部 基本编 第 1 章 设备概要
1-18
1-1-4-2 机械规格
(1) 贴片精度
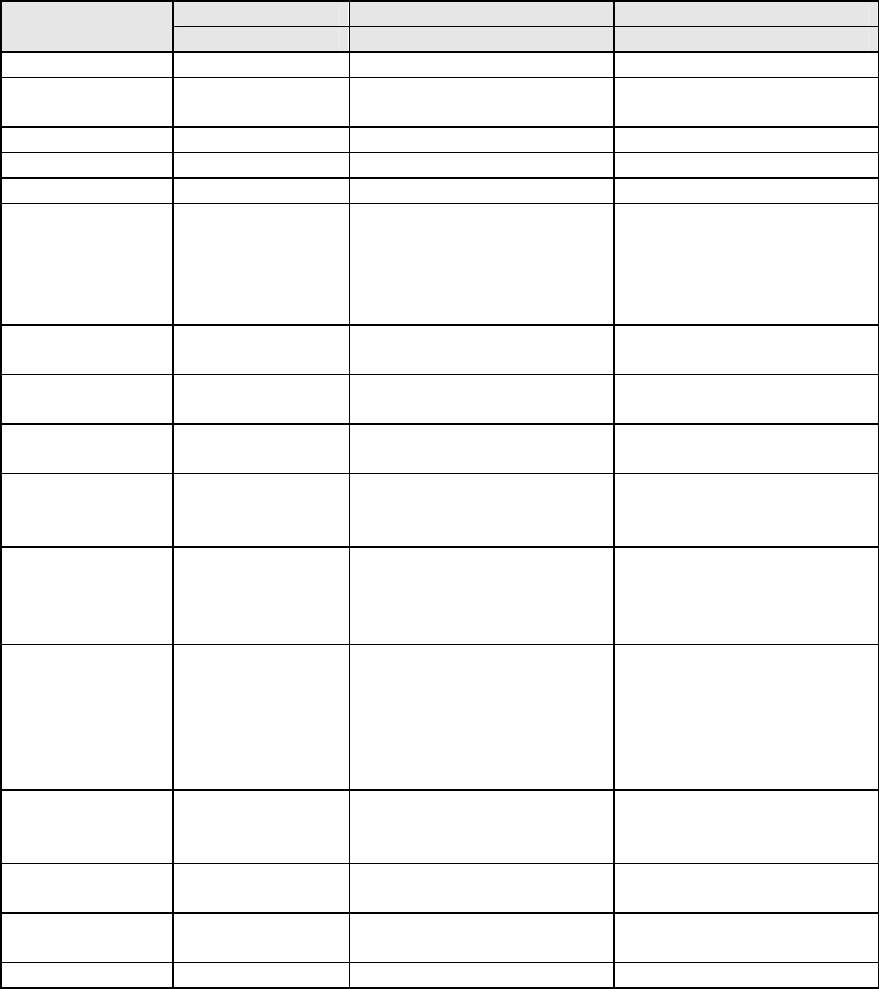
各种元件的贴片精度如下表所示。
某些元件在激光校准检测部分有边缘,或在模部有毛边等,或相对于吸取部检测部不固定
时,则其精度有可能比下表低。
表 1-1-4-3 贴片精度
单位:
μm
激光 摄像机/CCD 摄像机/CCD
MNLA/FMLA 识别 VCS(FMLA 贴片头) VCS(MNLA 贴片头)
0603 方型芯片 ±50 (仅 MNLA) -
方型芯片
(0603 除外)
±50
-
圆筒形芯片 ±100 - -
SOT ±150(注 3) -
铝电解电容 ±300 ±150 ±160
SOP、TSOP
引脚垂直方向:
±150 (毛边一侧
150μm 以下) (注 3)
引脚平行方向:±200
(注 7)
使用基板基准标记时:
引脚垂直方向:±80(注 3)
引脚平行方向:±120(注 7)
使用基板基准标记时:
引脚垂直方向:±90
引脚平行方向:±130(注 7)
PLCC、SOJ ±200
使用元件定位标记时:±80
使用基板基准标记时:±100
使用元件定位标记时:±90
使用基板基准标记时:±110
QFP、
(间距 0.8 以上)
±120(注 3)
使用元件定位标记时:±40
使用基板基准标记时:±60
使用元件定位标记时:±50
使用基板基准标记时:±70
QFP
(间距 0.65)
±50 (注 3)
使用元件定位标记时:±40
使用基板基准标记时:±60
使用元件定位标记时:±50
使用基板基准标记时:±70
QFP
(间距 0.5,0.4,0.3)
-
使用元件定位标记时:±30 (注
9)
(仅可元件定位标记)
使用元件定位标记时:±40 (注
7)
(仅可元件定位标记)
单向引脚连接器、
双向引脚连接器
(间距 0.5)
-
使用元件定位标记时:
引脚垂直方向:±40
引脚平行方向:±120(注 7)
(仅可元件定位标记)
使用元件定位标记时:
引脚垂直方向:±50
引脚平行方向:±130 (注 7)
(仅可元件定位标记)
分段识别对象元件 -
使用元件定位标记时:
引脚垂直方向:±60
引脚平行方向:±120 (注 7)
使用基板基准标记时:
引脚垂直方向:±100
引脚平行方向:±120 (注 7)
未对应
BGA ±200
使用元件定位标记时:±80
使用基板基准标记时: ±120
(注 6)
使用元件定位标记时:±90
使用基板基准标记时:±130
FBGA -
使用元件定位标记时:±60
(仅可元件定位标记)
使用元件定位标记时:±70
(仅可元件定位标记)
外形识别元件
-
・使用基板基准标记时:±120
(注 4)
使用基板基准标记时:±130
(注 4)
其他大型元件 ±300(注 8) - -
第 1 部 基本编 第 1 章 设备概要
1-19
注1: 在整个贴片范围内,激光识别校正的精度以偏差的±3s 值以内为标准值,偏差的
平均值应在理论坐标±标准值的 40%以内(Cpk=1:
±70μm)。
注2: 图像识别校正时的精度应设定为元件基准标记或基板基准标记的绝对值。
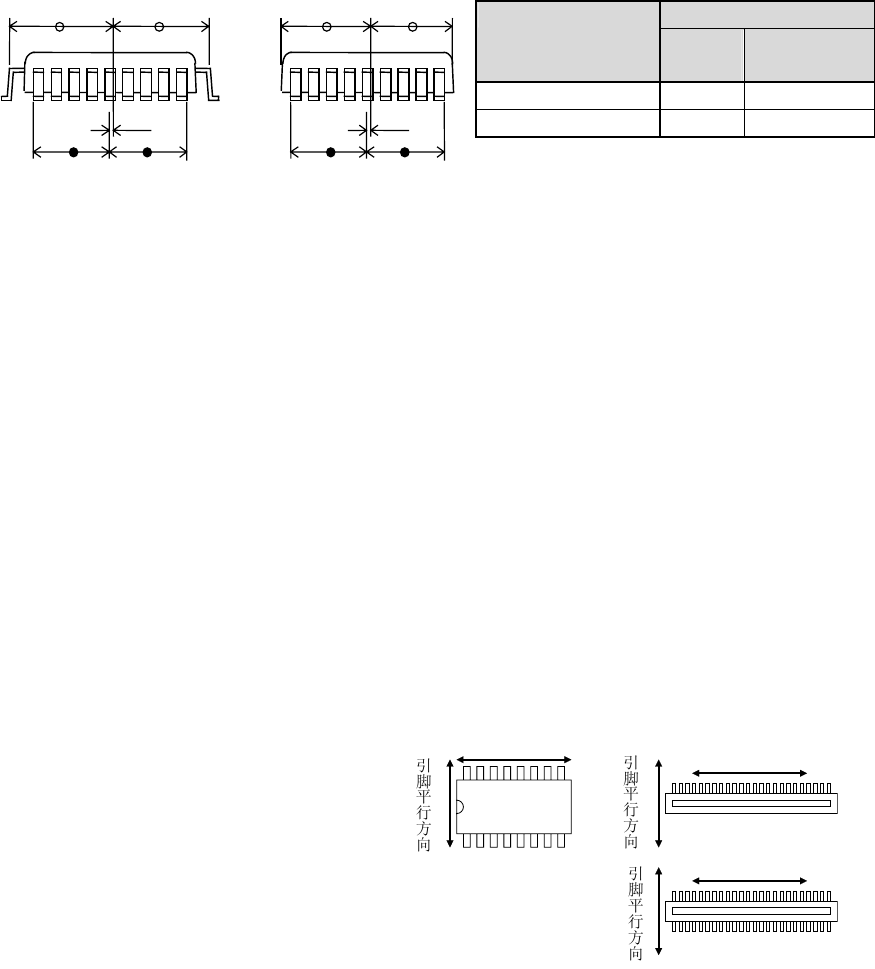
注3: QFP、SOP、SOT 等引脚的站立部分或元件体的中心位置(图中 S
C
)与引脚的中
心位置(图中 L
C
)的差 d 的允许值如下表所示。不满足下表条件时,不在上述精度范围
内。
元件体中心位置与引脚中心位置 d的允许偏差
Sc
Lc
d
Sc
Lc
d
注 4:使用本公司精度评价模具检测 4 边、4 角、重心的值。
以下列条件为准时精度为□50mm 以下,
±260
μ
m 以下。
● 识别角时,角为 90°±0.5°。
● 识别角时,角的突出边长的 10%以下。
● 识别边时,2 条边(或边的延长)夹角为 90°±0.5°。
● 识别角时,指定识别 4 角。
● 识别边时,指定识别 4 边。
● 检测重心时,元件的长宽尺寸比不足 1:2 时不保证倾斜度的精度。
● 角、边的直线部分的平坦度在 0.1mm 以内。
● 识别角、边时,有边饰时厚度 0.3mm 以上。
注 5:保证上述精度时的周围温度范围:20℃~25℃。
注 6:因以下条件不能进行 BGA 的图像识别校正的除外。
①焊球与基板上焊球焊装部分没有明显反差时。(对象为陶瓷体的 BGA 除外)
②与焊球直径相同粗细的图案相接,无法单独识别焊球时。
③焊球与基板上焊装部分存在与焊球相同直径的穿孔时。
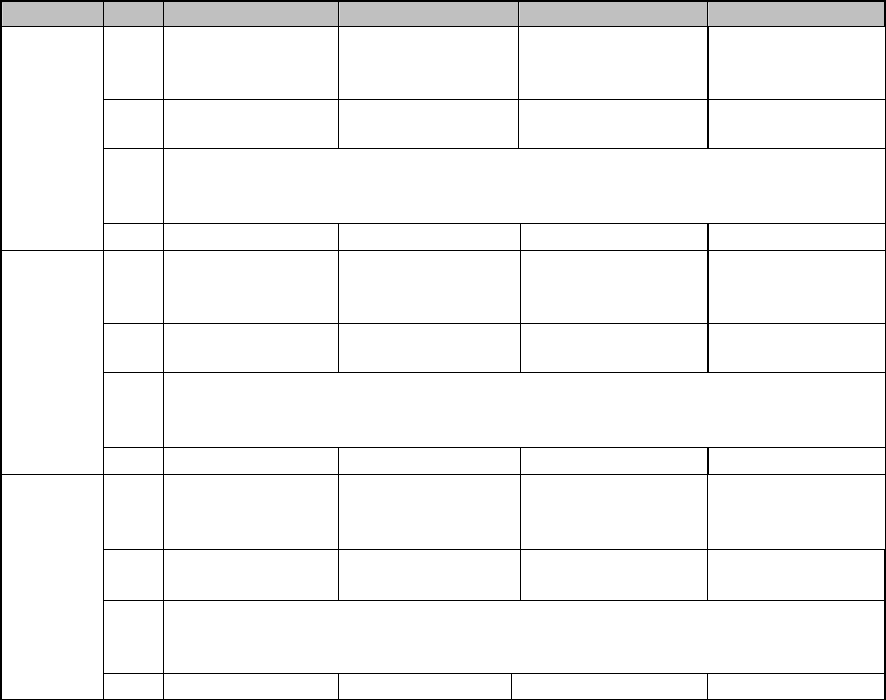
注7:SOP、单向/双向引脚连接器、
分段识别对象元件的引脚垂直方
向、引脚平行方向,请参见左图。
注8:以通过激光测量的断面部分
为测量精度。
注9:作为在同一贴片位置反复贴
片的精度。
贴片精度的定义:在模具基
板上至少贴片 6 处。测量的基准作为模具基板上的元件定位标记,各测量基准的绝对值
纳入精度范围。以 Min-Max 值定义。
注 10:通用图像元件识别的注意事项
通用图像的贴片精度明显受元件特性及照明条件的影响。
例如:1005 电阻芯片作为通用图像元件识别时的贴片精度为
±50μm,必须注意以下几
d 允许值
□ 25.4
以下
□25.4 以上□
33.5 以下
引脚间距 0.8 以上 73
μ
m 52
μ
m
引脚间距 0.65 15
μ
m 15
μ
m
リード直角方向
リード直角方向
リード平行方向
リード平行方向
リード直角方向
リード平行方向
引脚垂直方向
引脚垂直方向
引脚垂直方向
第 1 部 基本编 第 1 章 设备概要
1-20
点。
●关闭同轴照明灯、设定红色侧面照明与反射照明(=下方照明)高亮度,调整照明使
VCS 不映出吸嘴。
*根据当前元件的光反射特性,必要时可使用专用吸嘴。
注 10:关于 2055R、2060R(选项)MNLA 贴片头的图像识别(MNVC)请参见“6.2 MNVC”。
(2) 最小设订贴片角度
程序可贴片的角度单位:0.05°
(3) 自动工具交换装置(ATC)
可最多安装 31 个吸嘴。
KE-2050R、2055R:29 个
KE-2060R:29+(大型2)个
小型吸嘴安放装置30个中有1个位置通常用于真空校准。如将其去掉则可安装30个。
(4) 传送导轨高度
900mm±20mm
(5) 机械尺寸与重量
机型 尺寸 M 基板规格 L 基板规格 L-Wide 基板规格 E 基板规格
W
1300mm
(含基板传送部分:
1400)
1300mm
(含基板传送部分:
1500)
1300mm
(含基板传送部分:
1730)
1300mm
(含基板传送部分:
1730)
D
1393mm
(含键盘部分:1630)
1500mm
(含键盘部分:1735)
1500mm
(含键盘部分:1735)
1600mm
(含键盘部分:1835)
H
1440mm(基板传送高度为“900mm”的主机部分高度)
1725mm(基板传送高度为“900mm”的视屏监视器高度)
2000mm(基板传送高度为“900mm”的信号灯高度)
KE-2050R
重量 1400kg 1460kg 1460kg
1530kg
W
1300mm
(含基板传送部分:
1400)
1300mm
(含基板传送部分:
1500)
1300mm
(含基板传送部分:
1730)
1300mm
(含基板传送部分:
1730)
D
1393mm
(含键盘部分:1630)
1500mm
(含键盘部分:1735)
1500mm
(含键盘部分:1735)
1600mm
(含键盘部分:1835)
H
1440mm(基板传送高度为“900mm”的主机部分高度)
1725mm(基板传送高度为“900mm”的视屏监视器高度)
2000mm(基板传送高度为“900mm”的信号灯高度)
KE-2055R
重量 1410kg 1470kg 1470kg
1530kg
W
1300mm
(含基板传送部分:
1400)
1300mm
(含基板传送部分:
1500)
1300mm
(含基板传送部分:
1730)
1300mm
(含基板传送部分:
1730)
D
1393mm
(含键盘部分:1630)
1500mm
(含键盘部分:1735)
1500mm
(含键盘部分:1735)
1600mm
(含键盘部分:1835)
H
1440mm(基板传送高度为“900mm”的主机部分高度)
1725mm(基板传送高度为“900mm”的视屏监视器高度)
2000mm(基板传送高度为“900mm”的信号灯高度)
KE-2060R
重量 1410kg 1470kg 1470kg 1530kg