KE-2000R_InstructionManual_C_Rev00说明.pdf - 第686页
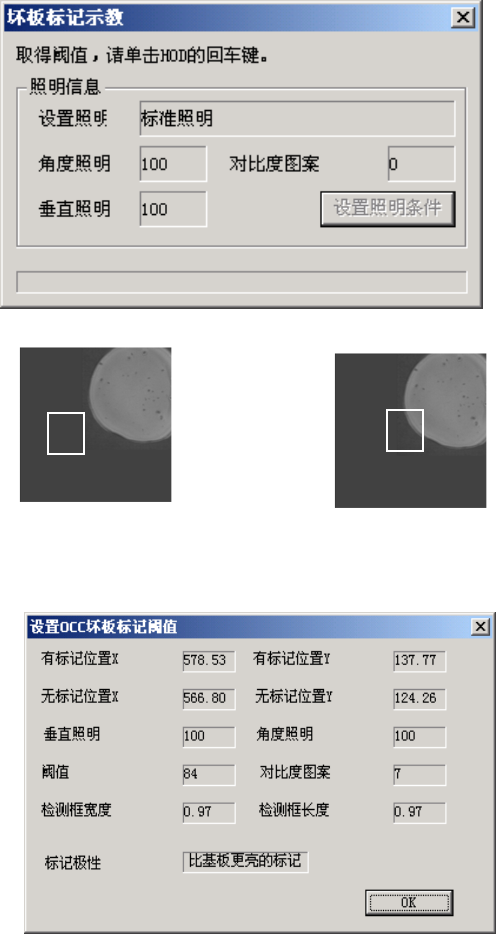
第2部 基本编 第8章 机器设定 确认检测框后,进行取得阈值的操作。交互进行有标记位置与无标记位置的识别操作。 进行上述动作时,请注意无标记检测框不要跟标记重叠。 OK NG 经测定,取得阈值后,显示结果。 ② 临界值的自动示教 选择[执行]后,显示坏板标记传感器[初始化中…]对话框,进行坏板标记传感器初始化。 之后,显示坏板标记传感器示教[执行中…]对话框,自动执行示教。 8-37
第2部 基本编 第8章 机器设定
[无标记位置]是,根据标记周围的分布,尽量指定相对于标记有对比度的位置。
把光标放在 OCC 坏板标记阈值设置位置上,按 CAMERA 键进行示教。
② 选择[传感器]时
用 HOD,通过摄像机示教输入,或直接从键盘逐项输入。
输入 XY 位置时,只要光标在 X 或 Y 上, XY 值可同时被读取反映。
输入 XY 位置后进行临界值自动示教。
执行操作
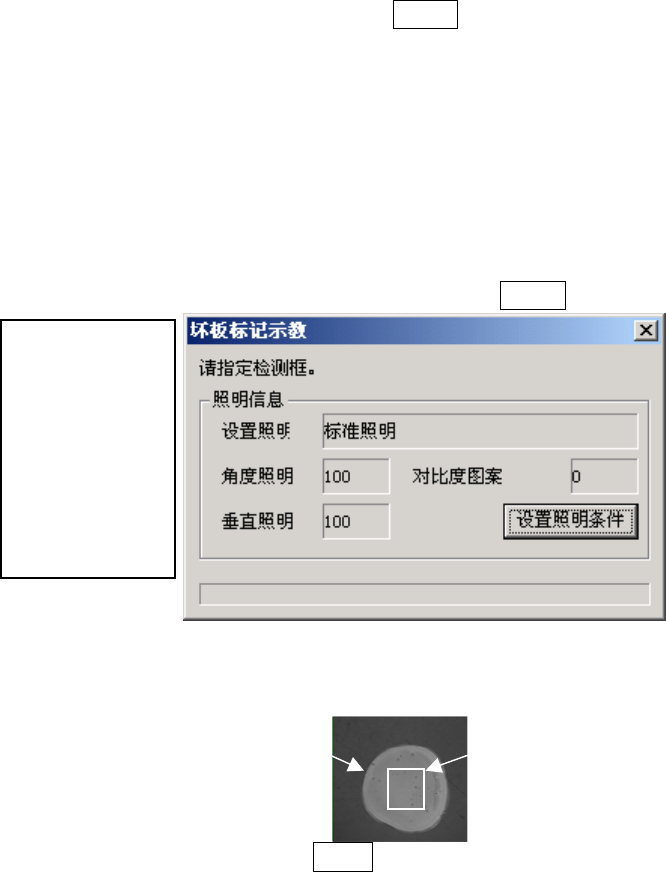
① 设置 OCC 坏板标记阈值的操作
把光标对准设置 OCC 坏板标记阈值的编辑框,按下 HOD 的 CAMERA 键开始示教。
确认坏板标记位置的坐标后,指定检测框(左上、右下)。
设置检测框时,其位置选在标记里面,具体请参考下图。
用 HOD 的方向键变更检测框尺寸,按 ENTER 键确认。
标记
切换显示画面,
请适当调整以
下画面位置。
检测框
8-36
第2部 基本编 第8章 机器设定
确认检测框后,进行取得阈值的操作。交互进行有标记位置与无标记位置的识别操作。
进行上述动作时,请注意无标记检测框不要跟标记重叠。
OK NG
经测定,取得阈值后,显示结果。
② 临界值的自动示教
选择[执行]后,显示坏板标记传感器[初始化中…]对话框,进行坏板标记传感器初始化。
之后,显示坏板标记传感器示教[执行中…]对话框,自动执行示教。
8-37
第2部 基本编 第8章 机器设定
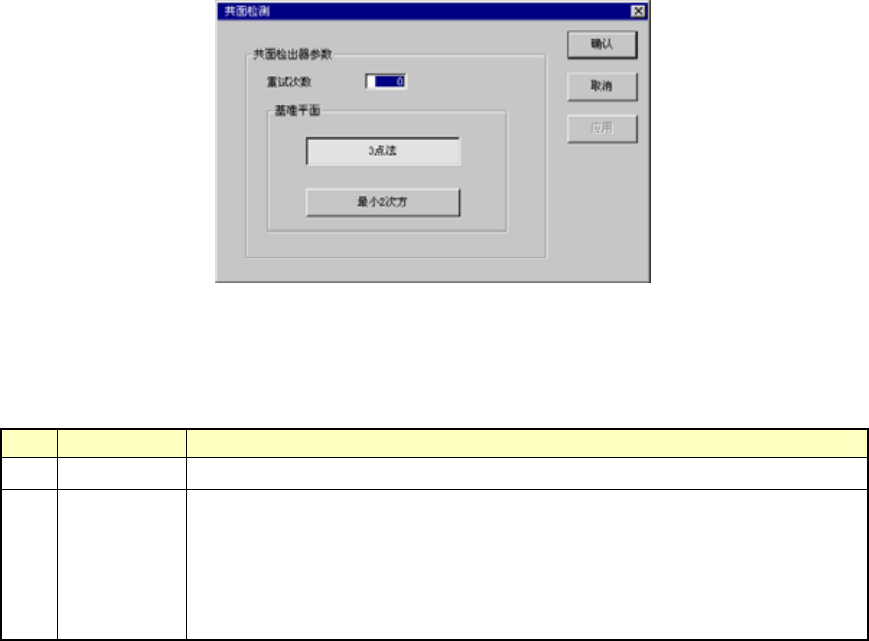
8-5-10-11 共面检测
若安装有共面性单元(可选),指定“共面性的重试次数”和“基准平面制作方法”。
若选择共面性,则显示下图的共面性设置画面。
图 8-5-24 共面性设置画面
1) 设置项目
No. 项目 设置内容
1 重试次数 设置共面性错误时的重试次数。
2 基准平面
为了判断引脚(或球)悬浮,必须决定作为判断基准的平面(基准平面)。
基准平面是通过识别所有引脚并由此制作假想平面的方式决定。基准平面
的制作方法,从“3 点法”和“最小平方法”中选择。
KE2055R、2060R 是根据 JIS 标准的规定,引脚元件采用“3 点法”,球
元件采用“最小平方法”。
2) 设置方法
① 重试次数
请直接从键盘输入次数。输入范围为0~10。
② 基准平面
通过按钮选择3点法还是最小平方法。
选择后,按钮变为凹状态。
8-38