KE-2000R_InstructionManual_C_Rev00说明.pdf - 第707页
第 2 部 功能详细编 第 9 章 手动控制 9-16 (2) 算法 通过组合框选择执行测量(SWEEP)时的激光算法。 按下“Alt”+“↓”键,显示如下的一览表。 图 9-4-1-3-1(b) 显示画面中左侧的数字表示算法,右侧的字母表示SWEEP时的 θ 旋转速度。 算法: 1(14, – 14): 从当前位置起反向旋转了预设角度后的位置, 从该位置起再旋转 θ 后, 找到阴 影宽度最小的位置(第1次)。然后, 从检测出的最小…
第 2 部 功能详细编 第 9 章 手动控制
9-15
9-4-1-3 激光控制
从菜单栏中选择“控制(C)”→“贴片头(H)”→“激光控制(L)”或选择命令按钮的“激光
控制”,显示如下的激光控制画面。
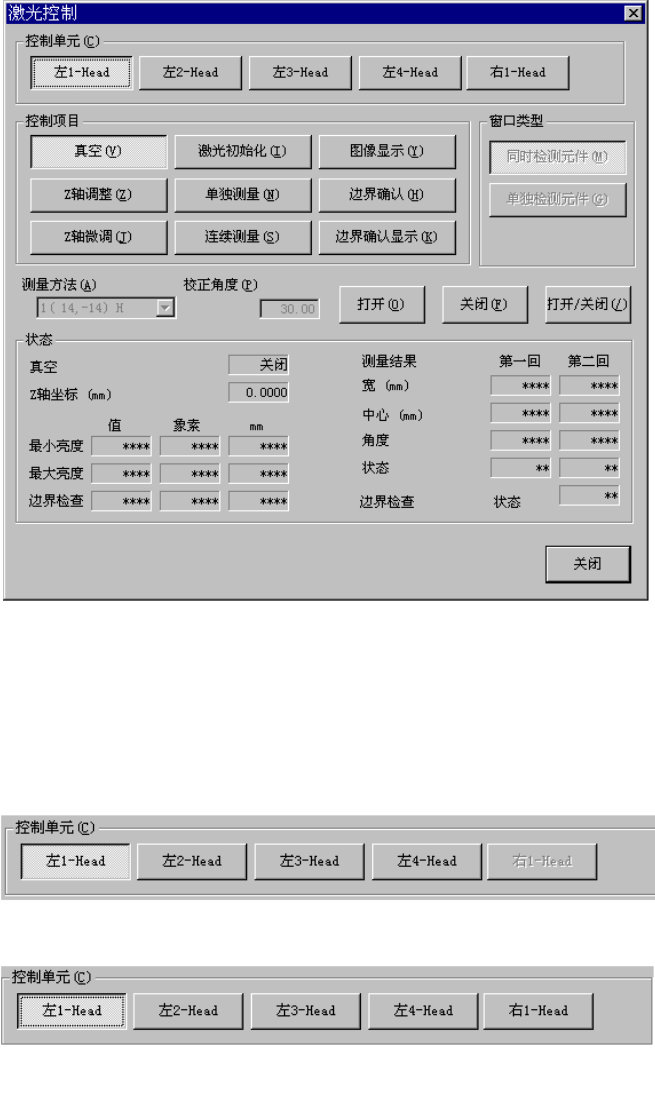
图 9-4-1-3-1 激光控制画面
(1) 控制单元
利用按钮来选择控制对象单元。
不受机器设置的“使用单元”设定的影响。(也可以选择不使用的单元)
图 9-4-1-3-1(a)
KE-2050R,2055R
KE-2060R

第 2 部 功能详细编 第 9 章 手动控制
9-16
(2) 算法
通过组合框选择执行测量(SWEEP)时的激光算法。
按下“Alt”+“↓”键,显示如下的一览表。
图 9-4-1-3-1(b)
显示画面中左侧的数字表示算法,右侧的字母表示SWEEP时的θ旋转速度。
算法:
1(14,–14): 从当前位置起反向旋转了预设角度后的位置,从该位置起再旋转θ后,找到阴
影宽度最小的位置(第1次)。然后,从检测出的最小宽度的位置起,旋转90
度,检测出第2最小宽度(第2次)。
相当于元件数据中设定的激光识别算法的算法1。
2(14,14): 从当前位置起反向旋转了预设角度后,从该位置起再旋转θ后,找到阴影宽度
最小的位置(第1次)。之后,从检测出的最小宽度的位置起旋转θ,检测出第2
最小宽度(第2次)。
相当于元件数据中设定的激光识别算法的算法2。
3(–14,–14): 不旋转θ,在运行时的位置检测阴影(第1次)。之后,在旋转到的位置检测阴
影(第2次)。
相当于元件数据中设定的激光识别算法的算法2。
速度: H:高速,M:中速,L:低速
(3) 控制项目
利用按钮来选择控制项目。
图 9-4-1-3-1(c)
第 2 部 功能详细编 第 9 章 手动控制
9-17
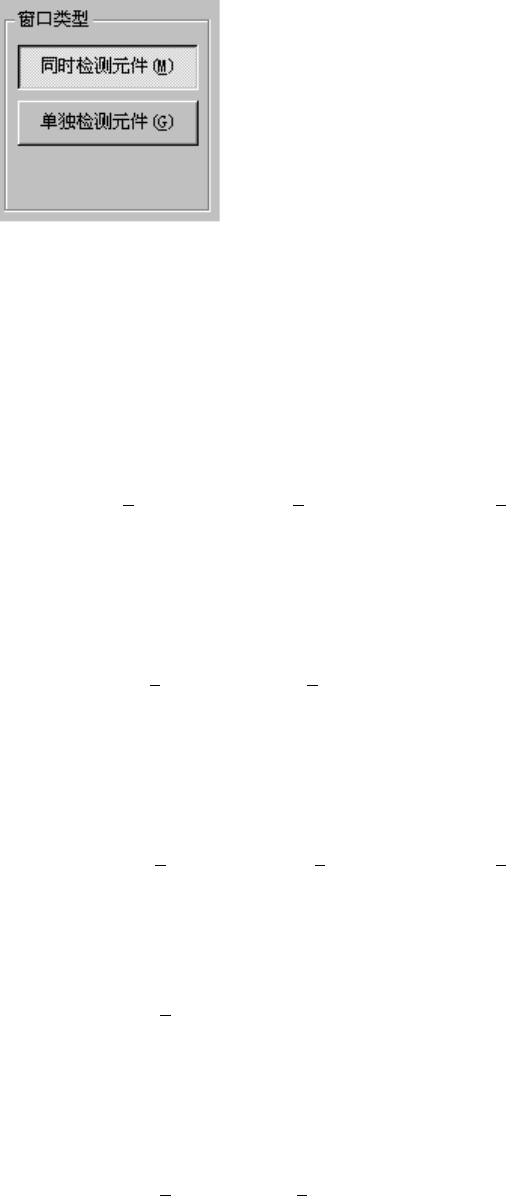
(4) 窗口类型
利用按钮来选择测量时的窗口类型。
在控制项目中选择了“测量(ONCE)”、“测量(SWEEP)”以外项时,不能进行设定。
图 9-4-1-3-1(b)
(5) 控制按钮
利用控制按钮来执行控制项目。
控制按钮的显示因控制项目而异。
在控制结束时更新状态显示。
1) 真空
控制所选贴片头真空的ON/OFF。
在控制项目的“真空”被选中时,选择“ON(1
)”按钮、“OFF(2)”按钮、“ON/OFF(3)”按
钮或按下“F3”键、“F4”键、“F5”键进行控制。
2) Z 轴调整
对所选贴片头的Z轴坐标进行控制。
吸嘴吸取元件时使用。
在控制项目的“Z轴调整”被选中时,选择“上(1
)”按钮、“下(2)”按钮、“上/下(3)”按
钮或按下“F3”键、“F4”键、“F5”键进行控制。
3) Z 轴微调
对所选贴片头的Z轴坐标进行控制。
将吸取元件移动到激光测量高度时使用。
在控制项目的“Z轴微调”被选中时,选择“上(1
)”按钮、“下(2)”按钮、“LA面(3)”按
钮或按下“F3”键、“F4”键、“F5”键进行控制。
4) 激光初始化
初始化所选贴片头的激光传感器。
选中控制项目的“激光初始化”时,选择“执行(1
)”按钮或按“F3”键控制。
5) 测量(ONCE)
进行所选贴片头的激光测量(ONCE)。
ONCE可获得当前传感器拍摄的阴影信息。在状态显示的第1次位置中显示测量结果。(参见图9
-4-1-3-1)
选中控制项目的“测量(ONCE)”时,选择“执行(1
)”、“LA面(3)”按钮或按“F3”键、“F
5”键进行控制。