3. SM471_Introduction(Kor_Ver1).pdf - 第80页
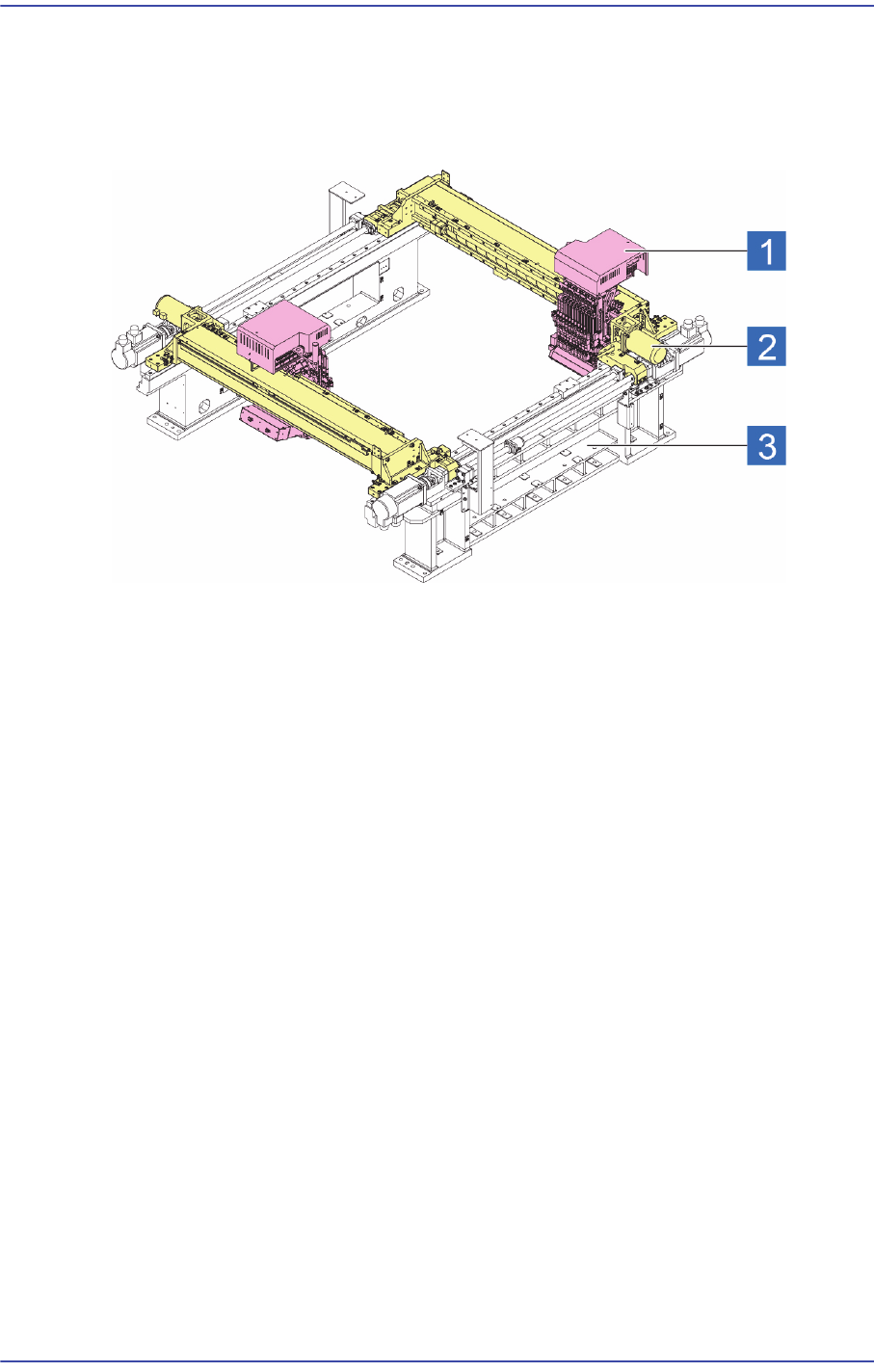
6-2 Samsung Component Place r SM471 Introduction 6.2. X-Y Frame 부 6.2.1. 구성 그림 6.2 X-Y Frame 부 1: Head 2: X Frame 3: Y Frame 6.3. PCB Transport System 6.3.1. 구성 PCB Conveyor System 은 이전 장비에서 운반되어온 기판을 이송하고 , 부품을 장착 하기 위한…
6-1
Module Function
제6장. Module Function
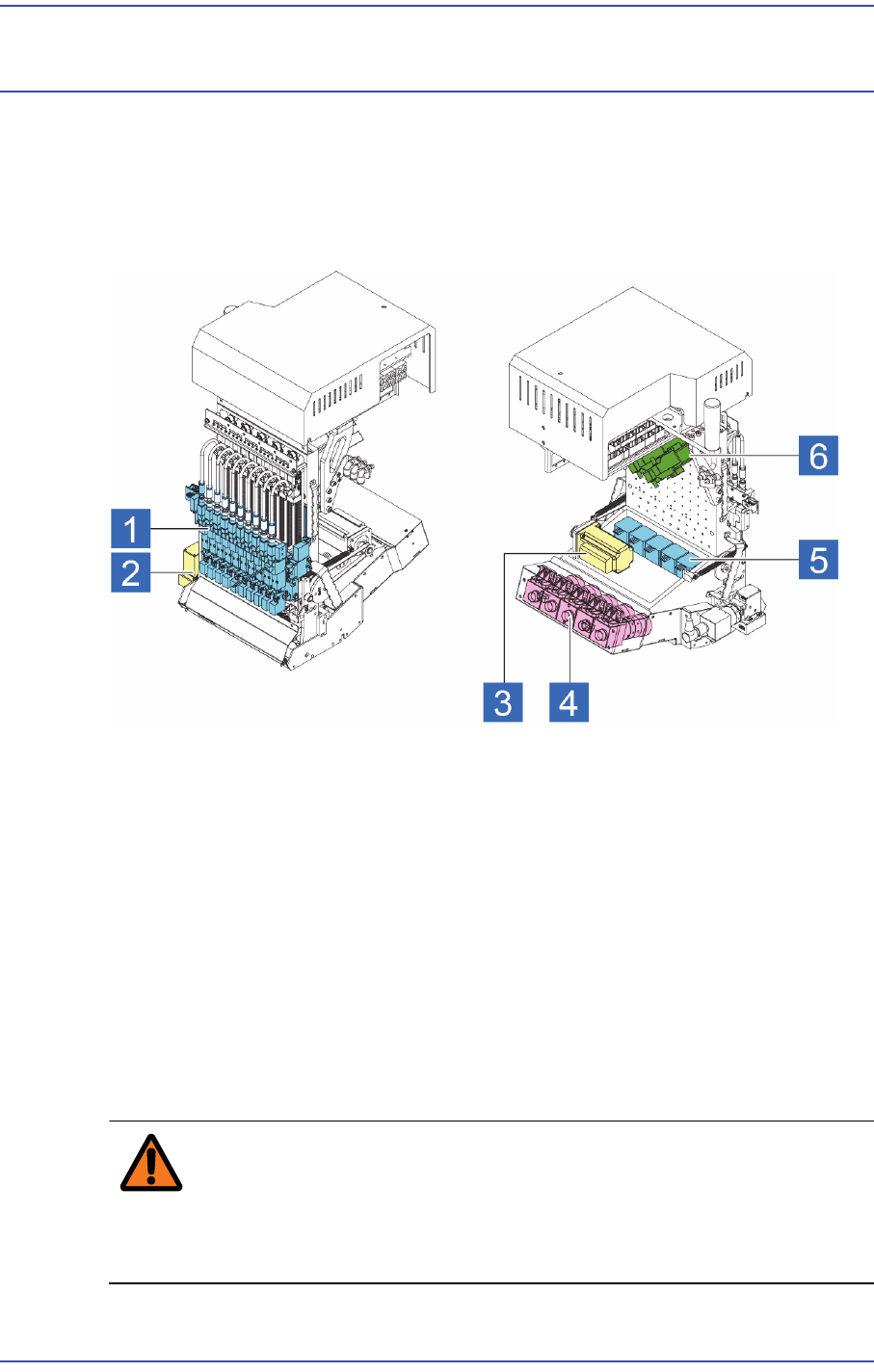
6.1. Head Assembly
6.1.1. Head Assembly
그림
6.1 Head Assembly
1: Air Module
2: Fiducial Camera
3: Mirror Axis motor
4: Fly Camera
5: R Axis motor
6: Z Axis motor
Head Assembly는 하나의 모듈로 제작되어 있으며, 이 모듈은 10개의 Spindle
Units로 구성되어 있습니다.
각 Spindle은 해당
되는 Flying Vision Camera가 있으며, 이에 의한 Vision 인식 방
식을 통해서 작업을 수행합니다. 모든 Spindle은 SM 피더로부터 동시에 흡착
(pick-up)을 하기 위해 일정한 간격(15 mm)을 두고 배치되어 있습니다 .
경 고 Head의 Z 축 하강 동작 중에 head 아래에 손을 삽입하면 상해를
입을 수 있습니다.
장비 동작 중 he
ad 아래에 손을 삽입하지 마십시오.
6-2
Samsung Component Placer SM471 Introduction
6.2. X-Y Frame 부
6.2.1. 구성
그림
6.2 X-Y Frame
부
1: Head
2: X Frame
3: Y Frame
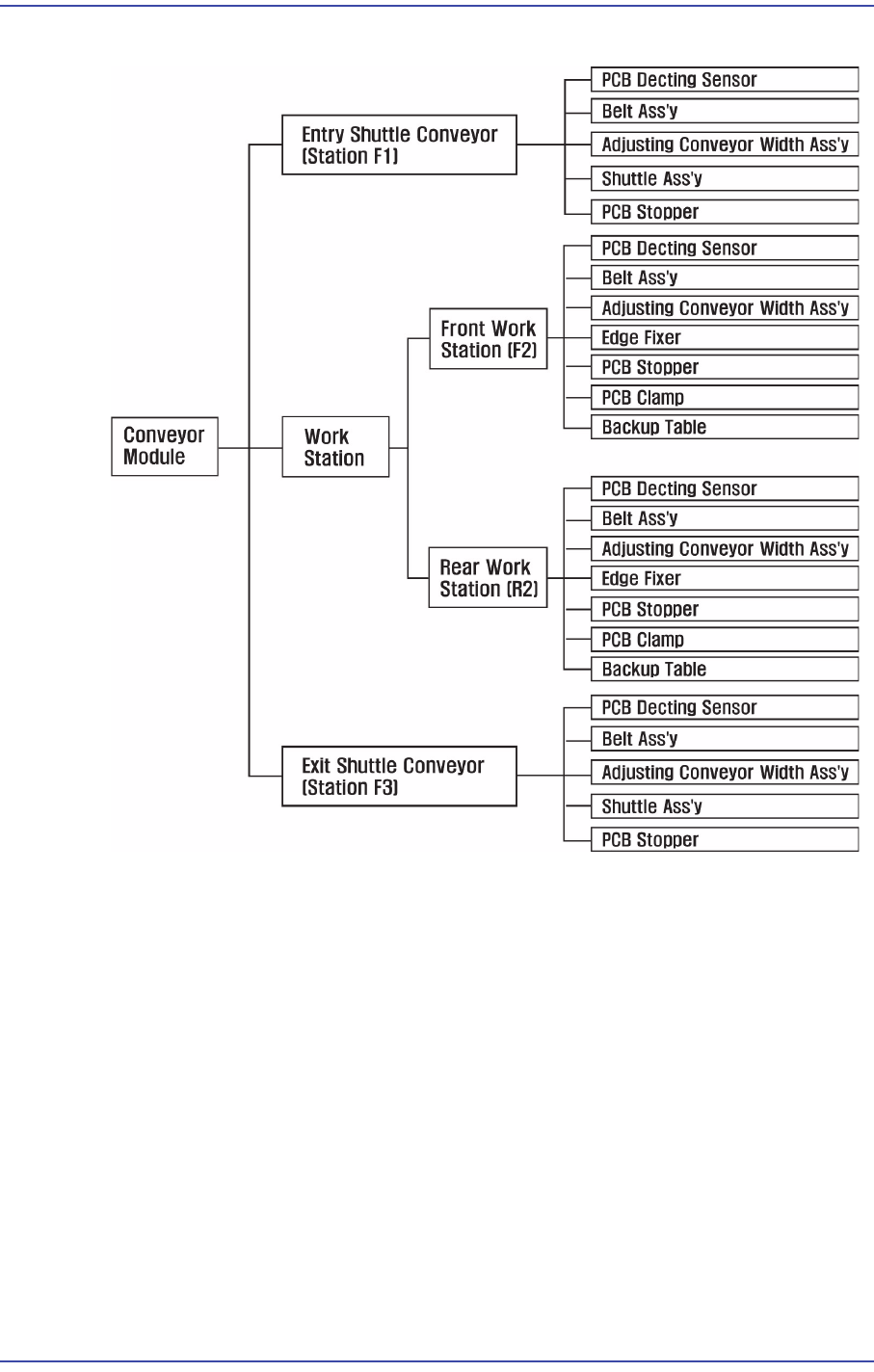
6.3. PCB Transport System
6.3.1. 구성
PCB Conveyor System은 이전 장비에서 운반되어온 기판을 이송하고, 부품을 장착
하기 위한 위치결정과 기판을 고정하는 System입니다. SM471은 2 개의 Work
Conveyor Lane을 가지고 있어 소형 PCB의 경우 전 후 작업 영역에 2개의 PCB 를 동
시에 로딩하여 장착작업을 할 수 있습니다.
이전 장비
로부터 투입된 PCB를 반입하여 전, 후 Work Conveyor Lane 으로 분배하는
Entry Shuttle Conveyor(St00), PCB를 고정하여 장착 작업이 이루어지는 Work
Conveyor 및 2개의 Lane으로부터 작업된 PCB를 수집하는 Exit Shuttle
Conveyor(St02)의 2 열 3단으로 구성되어 PCB 교체시간을 최소한으로 단축할 수 있
는 것이 특징이며, PCB 밑면 고정방식의 PCB 고정으로 PCB 편평도를 향상시켰습니
다.
소형 PCB((L)50.0mm×(W)40.0mm)에서 대형 PCB((L)5
10.0mm×(W)460.0mm)까지
폭 넓은 PCB의 대응이 가능하며, 특히 PCB(460.0mm×250.0mm)의 소형 보드에 대
하여 2장의 보드를 동시에 작업을 할 수 있게 되어 장착 효율을 향상시켰습니다.
자세한 PCB 사양
에 대해서는 “2.6.1 PCB
의
규격
,
휨
허용
오차
” 을 참조하십시오.
PCB Transport System의 구성은 다음과 같이 나눌 수 있습니다.
6-3
Module Function
그림
6.3 PCB Conveyor System
구성도
6.3.2. 기능
각 구성 요소별 기능은 다음과 같습니다.
Co
nveyor Module
Entry Shuttle Conveyor Frame, Work Conveyor F
rame, Exit Shuttle Conveyor Frame
PCB 흐름의 기본
이 되며 Unit 별로 각종 Part가 부착됩니다.