3. SM471_Introduction(Kor_Ver1).pdf - 第82页
6-4 Samsung Component Place r SM471 Introduction 그림 6.4 PCB Conveyor Module PCB 감지 Sensor Assembly Conveyor 상의 각 구간별 PCB 의 유무 를 Check 하는 역할을 합니다 . Entry Shuttle, F r o n t Wo r k , R e a r Wo r k 및 Exit Shuttle 각 Unit …
6-3
Module Function
그림
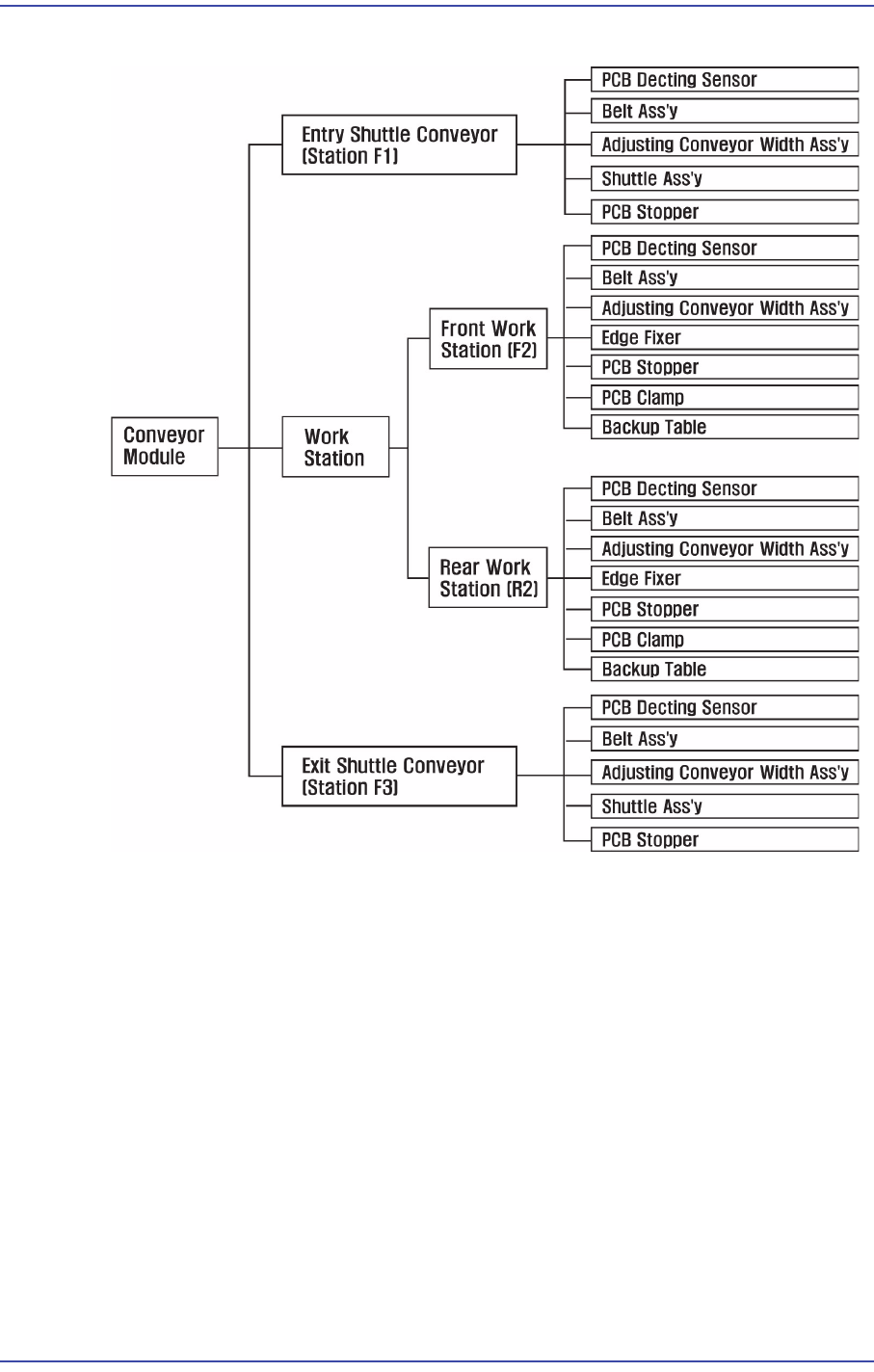
6.3 PCB Conveyor System
구성도
6.3.2. 기능
각 구성 요소별 기능은 다음과 같습니다.
Co
nveyor Module
Entry Shuttle Conveyor Frame, Work Conveyor F
rame, Exit Shuttle Conveyor Frame
PCB 흐름의 기본
이 되며 Unit 별로 각종 Part가 부착됩니다.
6-4
Samsung Component Placer SM471 Introduction
그림
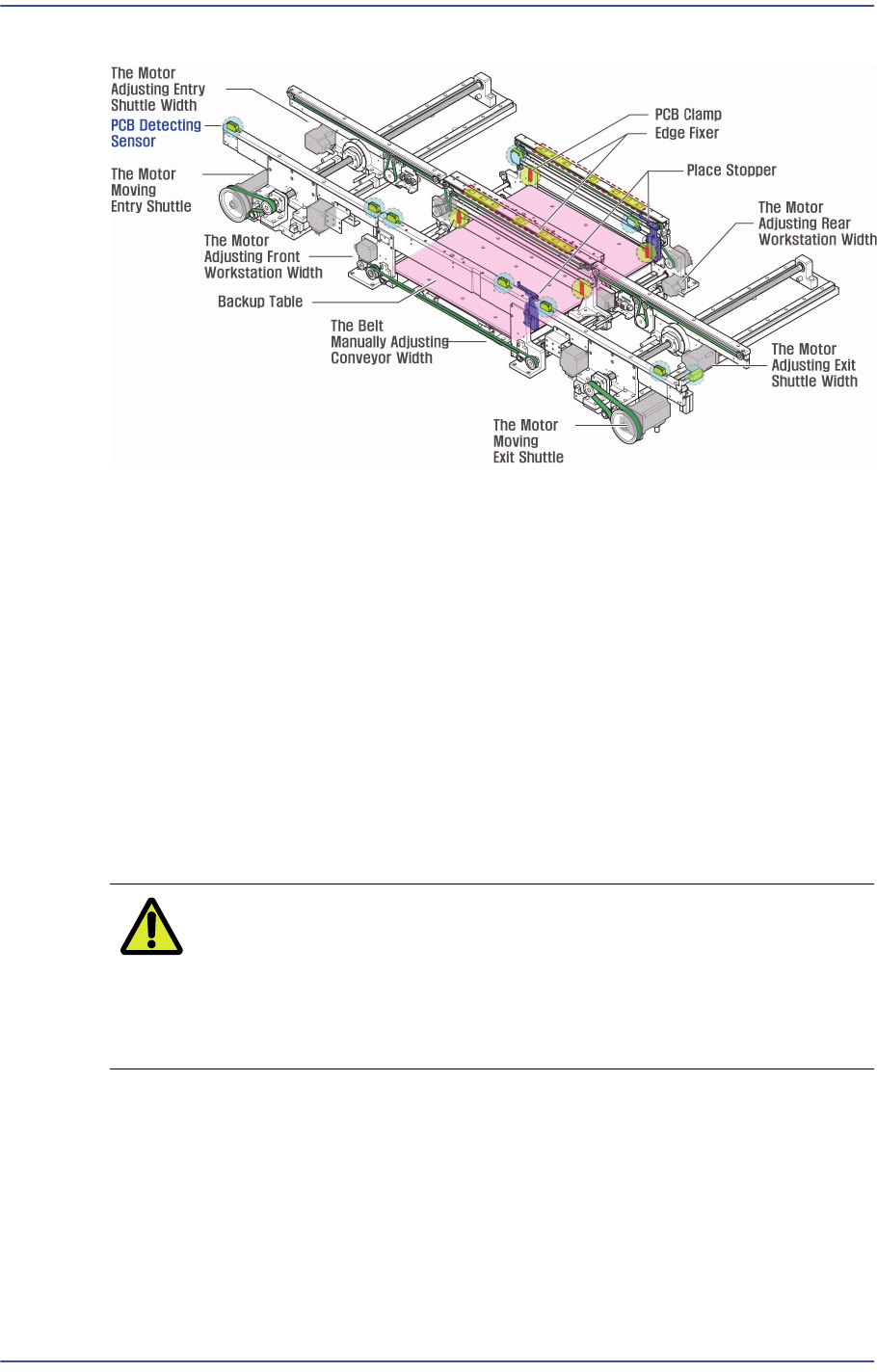
6.4 PCB Conveyor Module
PCB 감지 Sensor Assembly
Conveyor상의 각 구간별 PCB의 유무
를 Check하는 역할을 합니다. Entry Shuttle,
Front Work, Rear Work 및 Exit Shuttle 각 Unit 별로 In 과 Out을 감지하는 센서가
있어 안정된 PCB 흐름을 모니터링합니다.
Be
lt Assembly
Step Motor 와 평 벨트
로 이루어지며 PCB 이송벨트가 Unit 별로 나뉘어져 각각
구동됩니다. Working Area에서 벨트를 이용하여 PCB 를 Clamping 할 수 있습니
다.
폭 조절 Asse
mbly
PCB Size에 따른 Rail의 폭을 조
절하기 위한 Part로 LM Guide 와 Ball Screw,
Motor , 위치 감지 Sensor등으로 이루어져 있습니다.
주 의 컨베이어 간섭 또는 컨베이어내 이물질 여부를 확인하지 않고
컨베이어의 폭 조절을 수행하면 컨베이어에 손상을 줄 수 있습
니다. 컨베이어의 폭 조절을 하기 전 컨베이어 간섭 또는 컨베이
어내 이물질 여부를 확인하십시오
Shuttle Assembly
Entry Zone과 Exit Zone에 있으
며 Entry Zone의 경우 PCB을 2개의 Work
Conveyor로 분배하고 Exit의 경우 2개의 Work Conveyor로부터 순차적으로 PCB
를 수납하기 위하여 전, 후로 왕복하는 기능을 하며 LM Guide와 Ball Screw,
Motor, 위치 감지 Sensor등으로 이루어져 있습니다.
6-5
Module Function
PCB Stopper
PCB를 작업위치에 정지시키는 역할과 PCB가 다음 영역으로 진행하기 전 위치
에 있을 경우 배출되기 전까지 PCB 를 잡는 역할을 합니다.
Edge Fixer
PCB가 작업위치에 도달하여 작업을 하기 전에 PCB위치를 보정하는 방법 중 하
나로 PCB의 Edge 를 밀어 PCB의 한쪽을 기준으로 보정을 합니다.
PCB Clamp
PCB가 작업위치에 도달하여 작업을 하기 전에 Belt 위에 닿아있는 PCB를 잡아
주는 역할을 하며 Back Up Table 과 연동하여 동작합니다.
Backup Table (BUT)
PCB가 작업위치에 도달하여 작업을 하기 전에 PCB의 평탄도를 유지하기위한
Backup Pin등을 설치 시키고 PCB Clamp를 동작시킵니다.
경 고 BUT를 임의로 조작할 경우 BUT상의 이 물질 및 기구적인 간섭
으로 컨베이어가 손상될 수 있습니다. BUT상의 이 물질을 먼저
제거한 후 조작하십시오.
6.4. 부품흡착 불량탐지
흡착 시 Vac u um 압이 변화할 때 부품의 흡착불량을 탐지할 수 있는 Vacuum Sensor가
제공됩니다. 흡착 시 Va c u u m 압은 각 Nozzle에 대해 기본적으로 설정되어 있고, 또
한 성공적인 흡착을 위해서 각 Nozzle에 대한 가장 흡착에 적합한 Va c u u m 압을 설정
할 수 있습니다.
6.5. PCB 좌표 보정 기능 (Fiducial Mark 인식 )
이 기능은 기본적으로 제공되는 Moving Camera가 PCB 에 표시 되어있는 Fiducial
Mark를 인식한 후, 인식한 Fiducial Mark위치를 기준점으로 해서 장착 위치를 보정
하는 것입니다.
보정하는 방법에는 Global 보정과 Local 보정의 두 가지 방법이 있습니다.
Global 보정
PCB내의 한 점 또는 두 점을 기준으로 각 위치를 보정하는 것입니다. Array PCB
의 경우, Array PCB내의 소형 PCB 각각에 대해 보정할 수 있습니다. (Board의
정의에 관한 설정 항목 중 Fiducial Mark의 설정에서 사용됩니다.)
Local 보정