3. SM471_Introduction(Kor_Ver1).pdf - 第86页
6-8 Samsung Component Place r SM471 Introduction 6.5.1.6. Bad-Marks PCB 에 부품의 장착을 원하지 않을 경우 , Bad-Mark 를 PCB 에 표시합니 다 .( Bad- Mark 의 위치는 일정해야 합니다 ) PCB 의 바탕 색과 완전한 대조가 되어야 하며 , 직경은 2.5mm 이상이 되어야 합니 다 . 6.6. Flying Vision…
6-7
Module Function
6.5.1.3. Clearance Area
각 Fiducial Mark는 주변에 어떤 다른 표시(Conductor Pattern, 잔납, Marking)도 존재
하지 않는 사각형의 Clearance Area가 있어야 합니다. 사각형의 Clearance Area는 표
시의 원주 바깥 면에서 적어도 0.5mm 이상이 확보되어야 합니다. 즉, Fiducial Mark
주변 0.5mm 이내에는 어떤 표시도 없어야 됩니다.
6.5.1.4. Mark 의 기본적인 재질과 표면처리:
모든 인식용 Mark는 표면처리 되지 않은 동박 또는 아래의 재질로 코팅 되어야 합니
다.
투명한 비산화성 코팅
니켈코팅
주석코팅
납 도금
금 도금
열풍 Reflower Solder코팅
Flux 코팅
경 고 장비가 Ready인 상태에서 센서를 조정하거나 에러조치를 하면
상해를 입을 수 있습니다. 반드시 Ready를 해제하고 Stop상태
(Idle 모드) 에서 센서조정 및 에러조치를 하십시오.
메 모 Fiducial Mark 표면은 이미 인쇄되어있는 회로와 확실히 구별 가
능하도록 인쇄회로부분과는 완전히 대조되어야 합니다. Fiducial
Mark의 표면은 더러움이나 오염 없이 항상 청결하고 깨끗해야
합니다.
6.5.1.5. Fiducial Mark 의 평탄도
Fiducial Mark의 표면은 평평하고 완만해야 합니다. 표면의 비 편평도는 반드시
0.02mm 이내이어야 하고, 마찬가지로 Fiducial Mark의 표면을 덮는 물질도 평평하
고 완만해야 합니다 ( 즉, Fiducial Mark표면 기준 돌출부가 0.02mm 이내이어야 합니
다).
6-8
Samsung Component Placer SM471 Introduction
6.5.1.6. Bad-Marks
PCB에 부품의 장착을 원하지 않을 경우, Bad-Mark를 PCB 에 표시합니다.( Bad-
Mark의 위치는 일정해야 합니다)
PCB의 바탕
색과 완전한 대조가 되어야 하며, 직경은 2.5mm 이상이 되어야 합니다.
6.6. Flying Vision
6.6.1. 개요
Flying Vision System 은 10 개 헤드가 부품을 흡착위치에서 장착위치로 이송 시키기
위해 이송 중에 부품을 비전으로 인식하는 시스템입니다. 5개의 CCD Camera 로 10
헤드의 부품을 동시 인식 할 수 있으며, 각 헤드 별로 2 가지 방식의 다단계 디지털
조명을 선택적으로 사용할 수 있습니다.
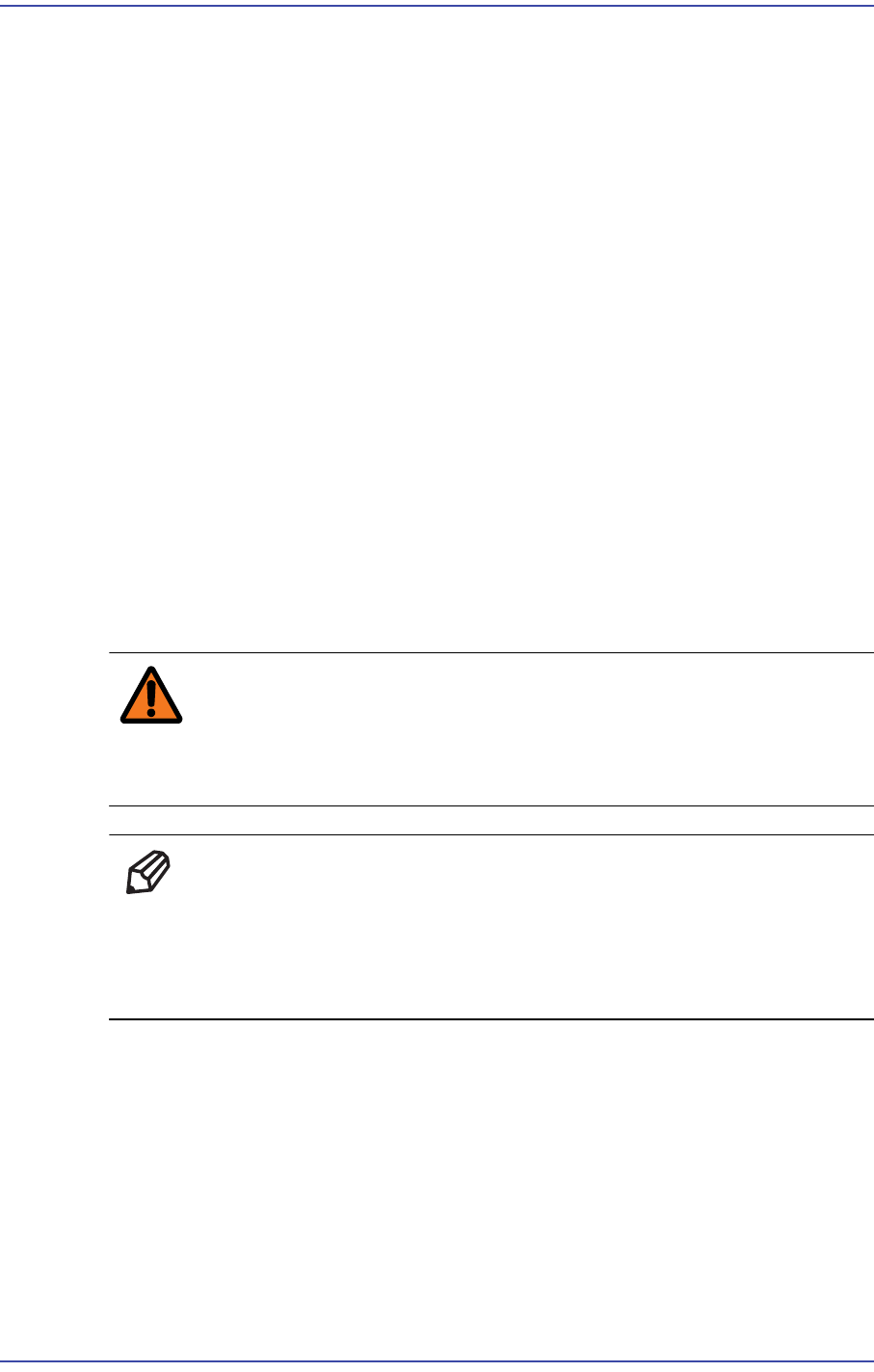
그림
6.6 Samsung Flying Vision
1: Fly Vision
2:
조명
3: Mirror
6-9
Module Function
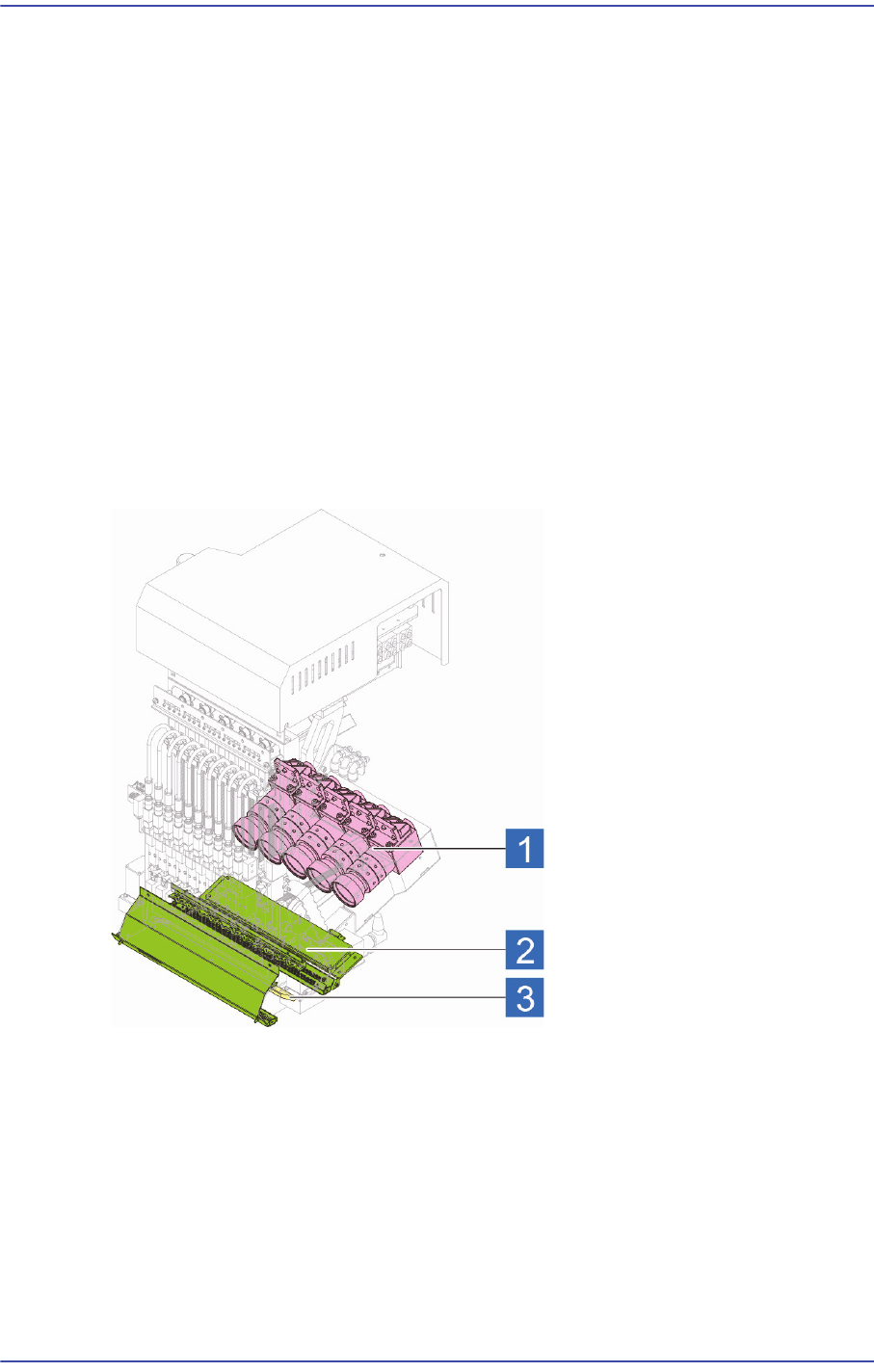
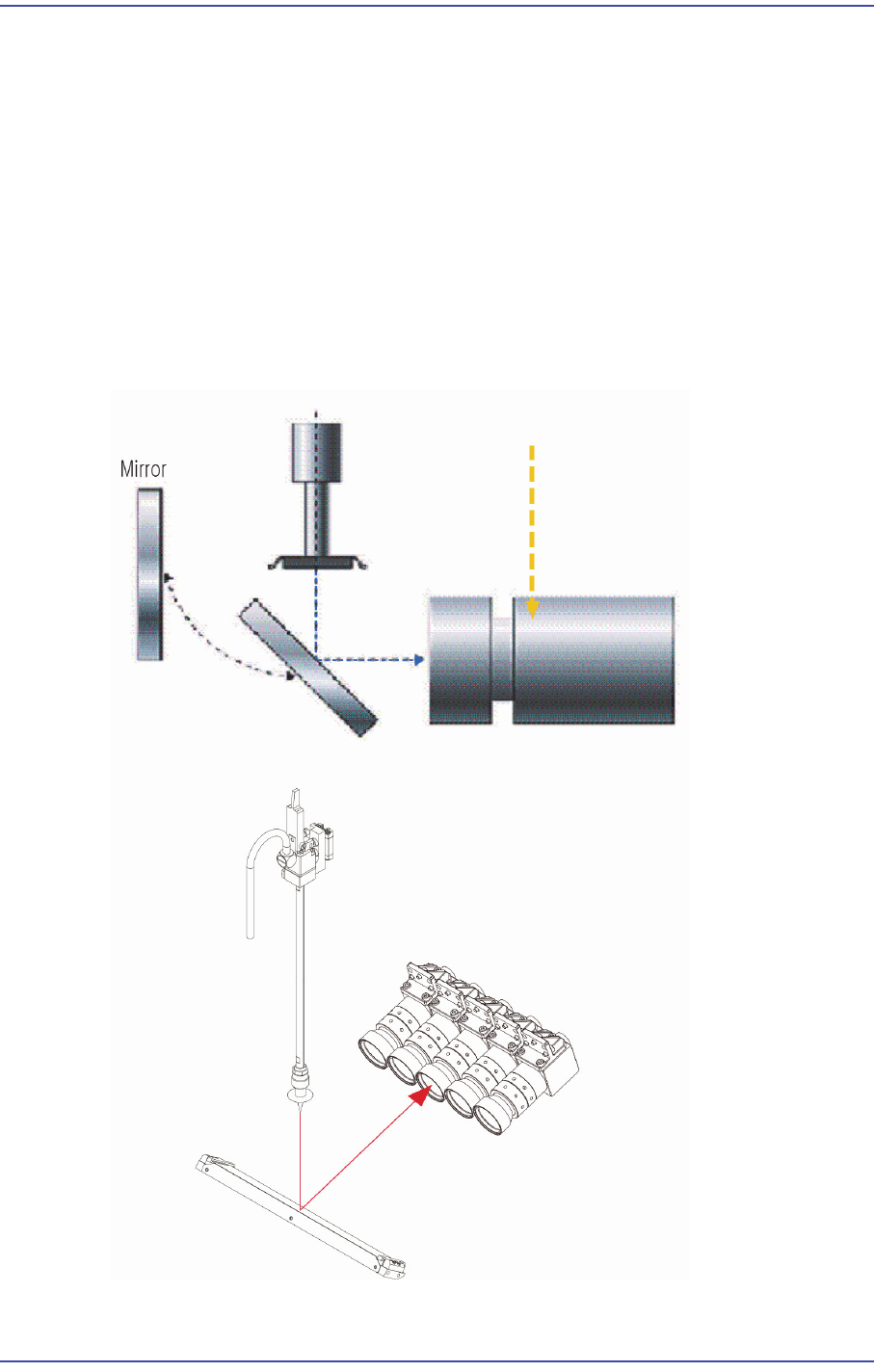
6.6.2. 광로제어
Flying Vision System은 수평으로 위치한 Camera가 수직으로 위치한 부품을 인식하
기 위해 광로 상에 거울을 사용하고 있습니다. 부품의 흡착 시, 헤드에 부착된 거울
은 헤드전면으로 회전 이동됩니다. 부품이 흡착된 후 장착위치로 이동 중에 거울이
헤드 밑면으로 회전 이동되어 부품의 화상이 거울을 통하여 헤드에 부착된 CCD
Camera에 결상됩니다.
결상된 화상
은 Vision 처리되어 부품의 위치 및 각도가 인식됩니다. 인식된 부품의
위치 및 각도를 이용하여 장착좌표가 보정되고, 보정위치에서 부품을 장착하는 경
우에는 거울은 다시 헤드전면으로 회전하여 이동됩니다 .
그림
6.7
광로제어