3OM-1751-002w_G5S.pdf - 第231页
3OM-1751 2-63 1303-001 2.9.1 "Comp. Recogn Cam" T ab Sheet [1] [2] [3] [4] F3B62 [1] X (Horizontal) and Y (V ertical) [mm] The set parameters are used to adjust the positional deviations based on the design dim…
3OM-1751
2-621303-001
2.9 "Comp. Recog" Window
[1]
[2]
[4]
[3]
F3B61
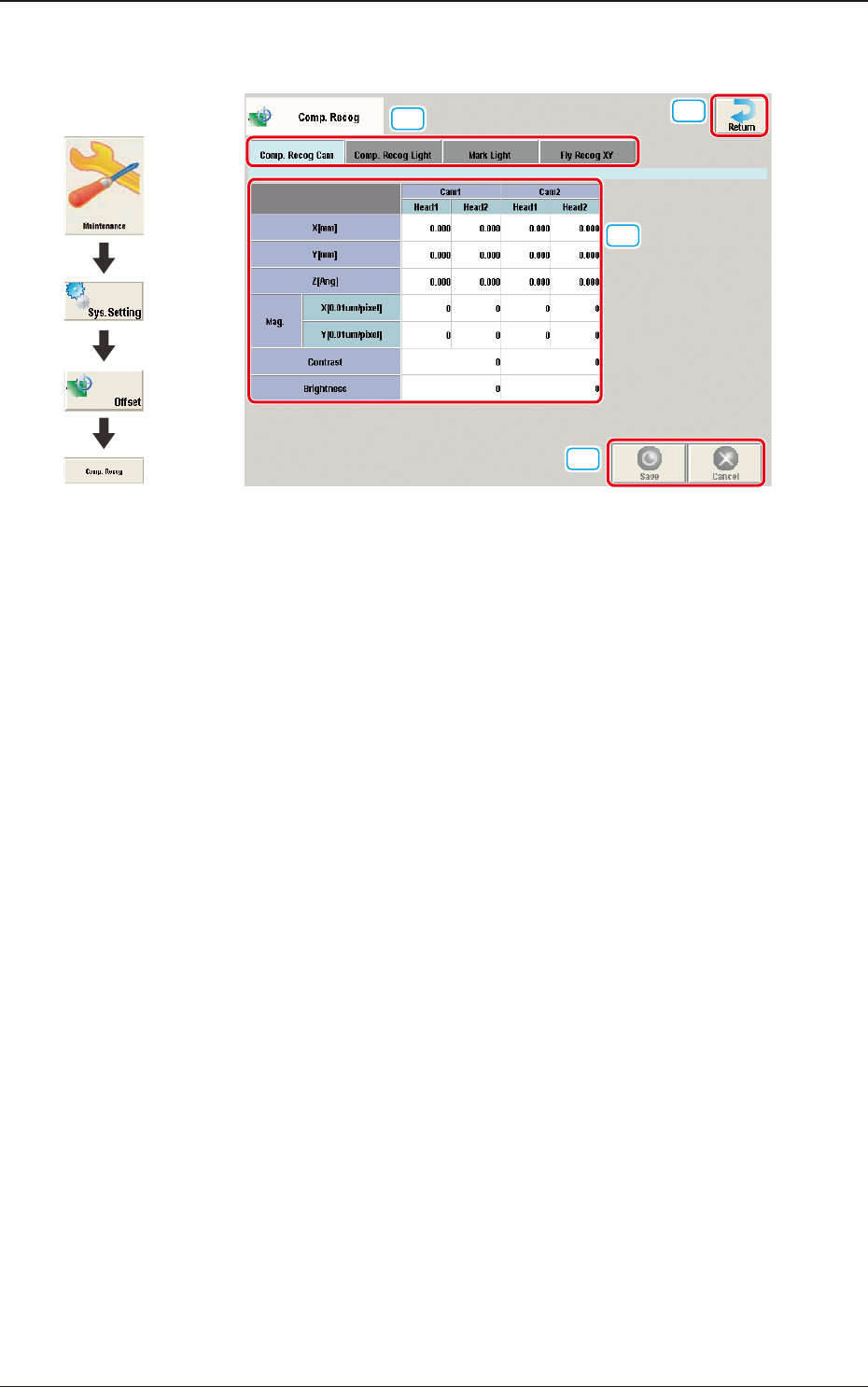
[1] Offset select tab
When this button is pressed, the offset data for the selected tab is displayed.
[2] Offset Data Display Section
In this section, the offset data selected in step [1] is displayed.
[3] [Save] button
When this button is pressed, the input data is saved.
[Cancel] button
When this button is pressed, the input data is cancelled and the save data is
returned.
[4] [Return] button
When this button is pressed, the "Offset Data" window is returned.
2.9 "Comp. Recog" Window
Graphic
Development
3OM-1751
2-631303-001
2.9.1 "Comp. Recogn Cam" Tab Sheet
[1]
[2]
[3]
[4]
F3B62
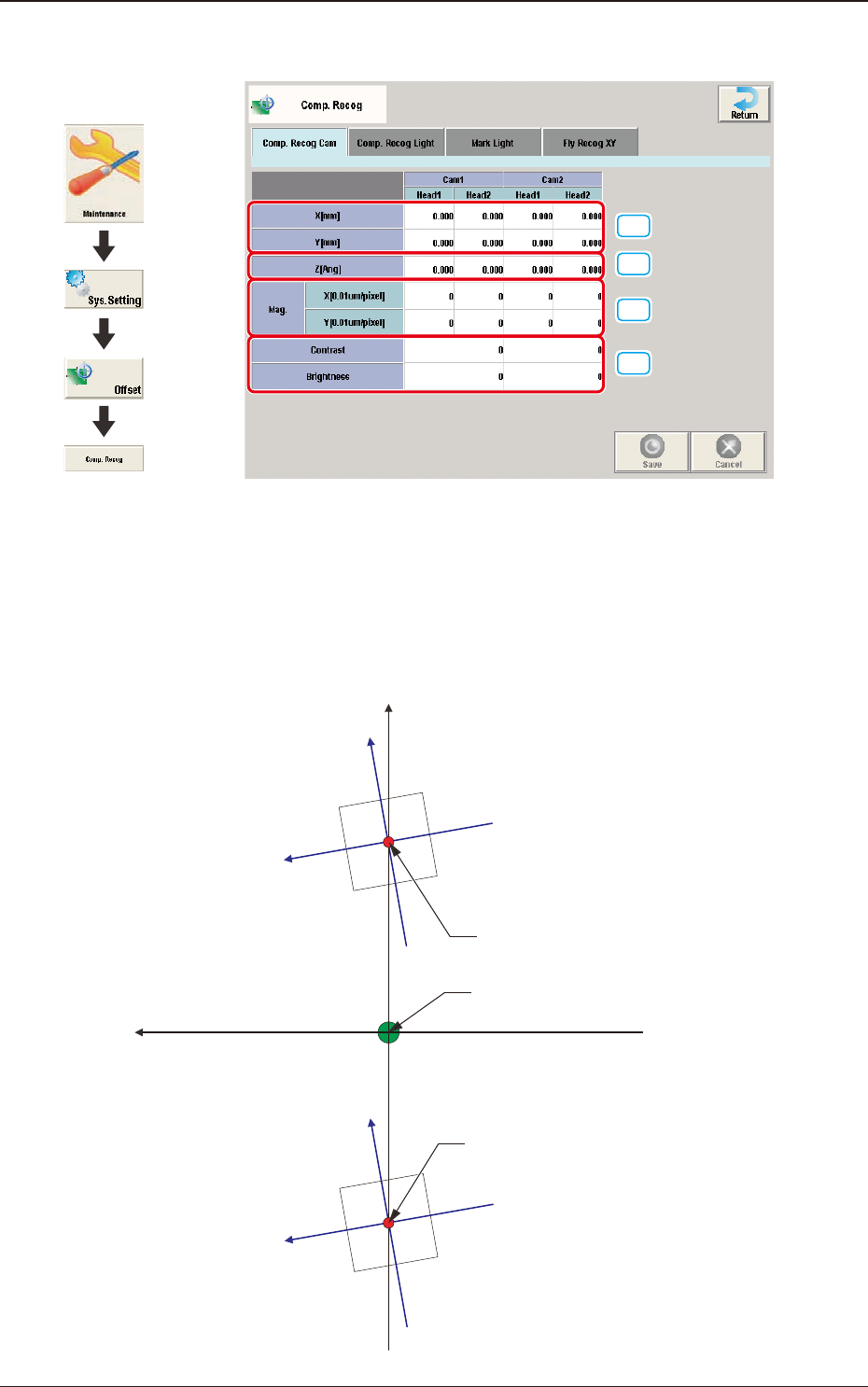
[1] X (Horizontal) and Y (Vertical) [mm]
The set parameters are used to adjust the positional deviations based on the
design dimensions between the machine reference coordinate origin and the
center of the component recognition cameras.
Xm(+)
Ym (+)
Xc(+)
Yc(+)
Xc(+)
Yc(+)
Center of Component
Recognition Camera
Center of Component
Recognition Camera
Pm. Machine Reference
Coordinate Origin
Xm-Ym
Xc-Yc
: Machine Reference
Coordinate System
: Component Recognition
Camera Coordinate System
F3B63
2.9 "Comp. Recog" Window
Graphic
Development
3OM-1751
2-641303-001
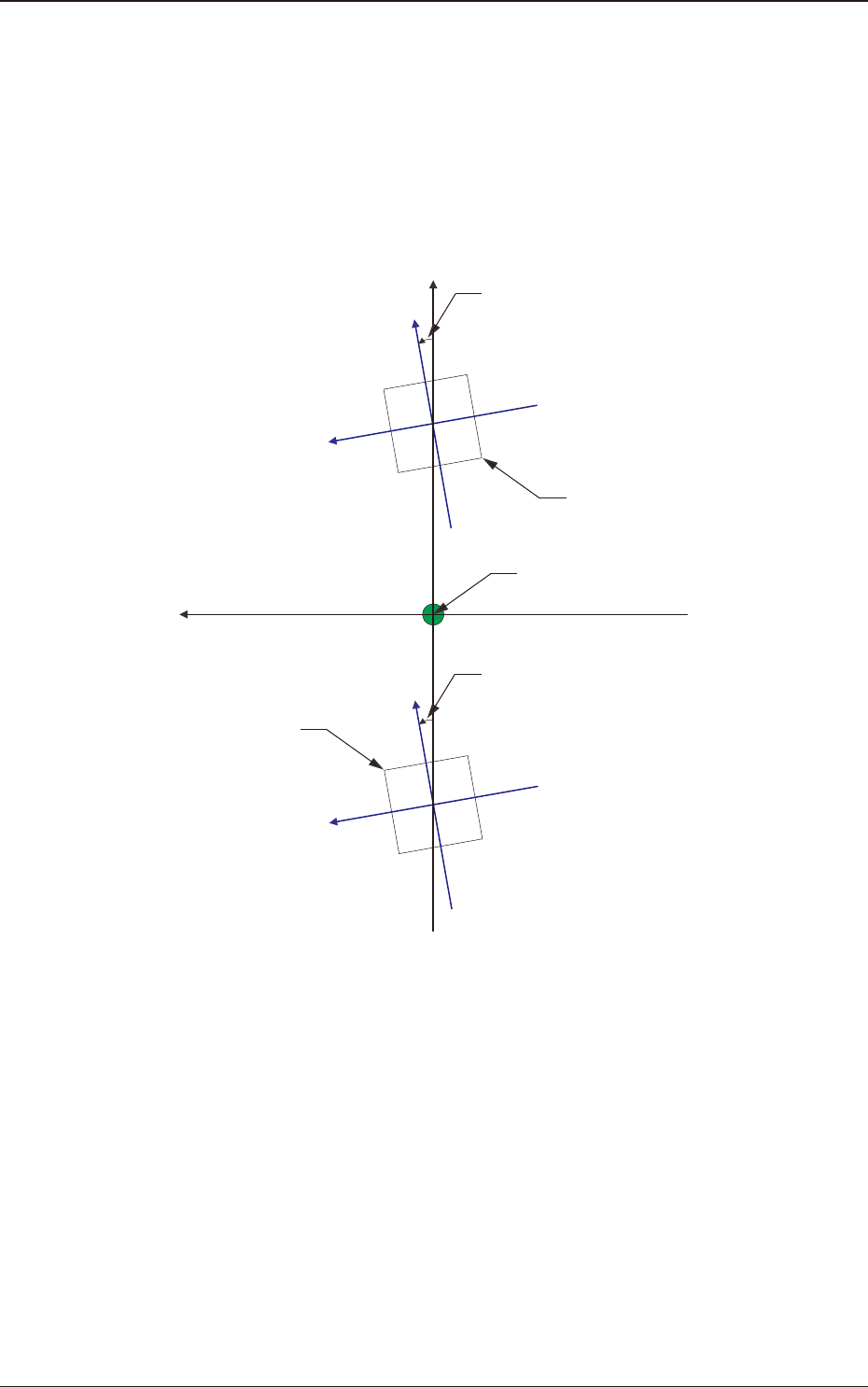
[2] Z (Angle) [Ang]
Set the parameters representing the angular deviations in the scanning
coordinates of the component recognition cameras based on the machine
reference X/Y coordinates (Xm-Ym).
When the camera scanning coordinates are shifted counterclockwise to the
machine reference X/Y coordinate system, a plus sign must be afxed to
each offset data.
Xm(+)
Ym(+)
Xc(+)
Yc(+)
Xc(+)
Yc(+)
Angle of Component Recognition
Camera
Angle of Component Recognition
Camera
Component Recognition
Camera
Component Recognition
Camera
Pm. Machine Reference
Coordinate Origin
Xm-Ym
Xc-Yc
: Machine Reference
Coordinate System
: Component Recognition
Camera Coordinate System
F3B64
[3] Mag. X (Horizontal) and Y (Vertical) [0.01 µm/pixel]
Set how many micrometers should be equivalent to one pixel to specify the
magnication of the component recognition camera.
This offset value is calculated automatically by means of the teaching
operation using the magnication measuring jig.
•
Default
: 6060
2.9 "Comp. Recog" Window