TR7007SII_Software_ch_v1-0-1PDFA - 第201页
Test Research Inc. TR 7007 SII Us er Guide – Sof tware 191 曝光時間–攝影機目前使用的曝光時間。單位為 µm /sec ( 十的負六 次方 秒 ) 。 掃描速度–顯示或設定掃描速度。單位為 µm/sec 。 GainOffset- 增加補償 (Administrator 才能更改 ) 。 Scan Mode – 使用者可在下拉式選單中選擇 [ Speed Mode ] 或 [ N…
Test Research Inc.
190 TR7007 SII User Guide – Software
7.3.1 內容
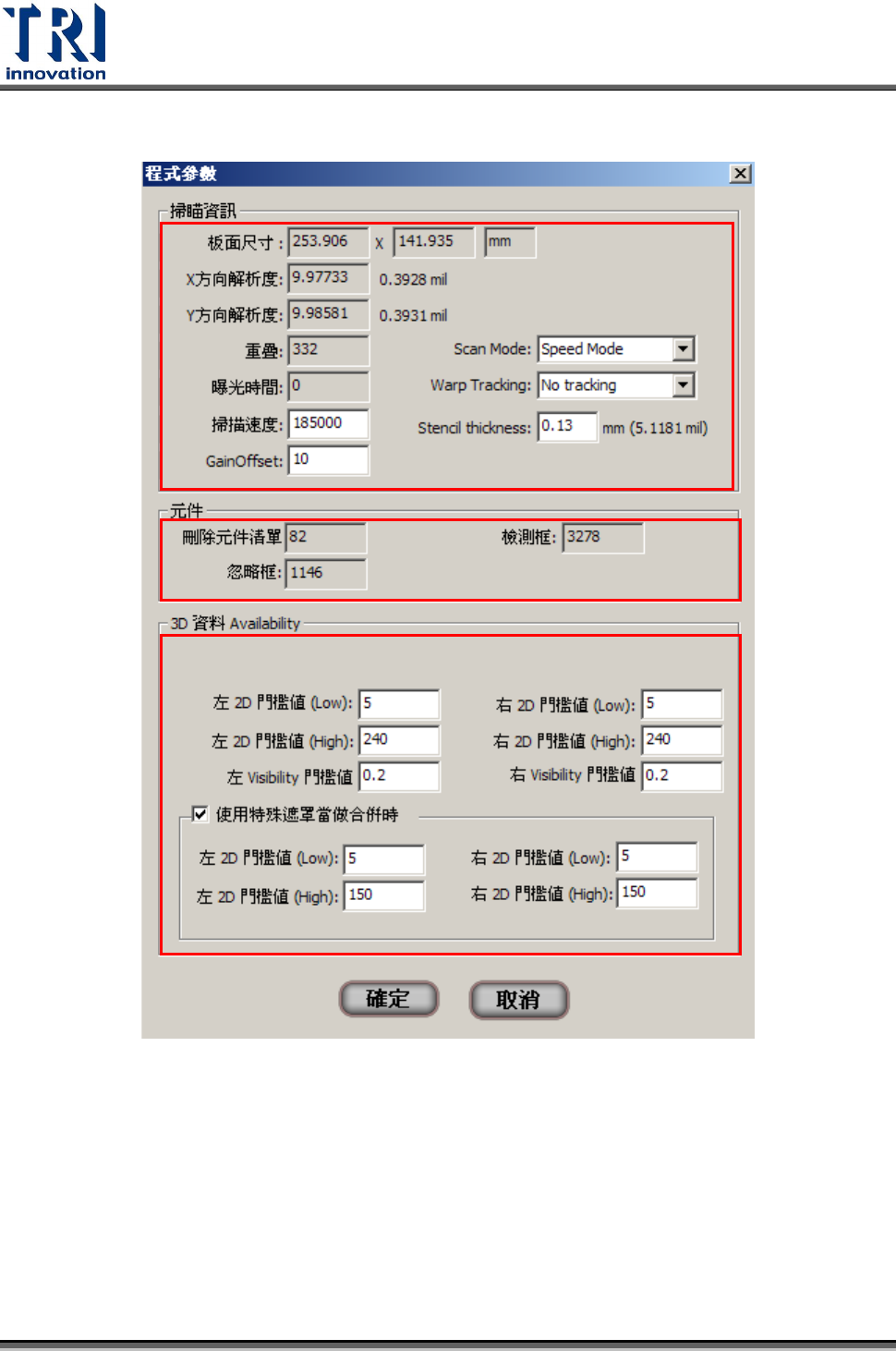
1) 掃描資訊
板面尺寸–顯示此機種設定的待測板大小。
X 方向解析度–目前使用 X 方向的解析度,此項目可調。
Y 方向解析度–目前使用 Y 方向的解析度,此項目可調。
重疊–顯示掃瞄的 Y 方向重複區域大小。
1
2
3

Test Research Inc.
TR7007 SII User Guide – Software 191
曝光時間–攝影機目前使用的曝光時間。單位為 µm/sec (十的負六次方秒)。
掃描速度–顯示或設定掃描速度。單位為 µm/sec。
GainOffset-增加補償(Administrator 才能更改)。
Scan Mode – 使用者可在下拉式選單中選擇[Speed Mode]或[Normal Mode]
Warp Tracking–板彎補償追蹤方式選擇。
No Tracking–直接檢測,不進行追蹤補償。
Y tracking learning–Y 方向板彎補償追蹤。
Y tracking fix–以第一片板子所做的板彎補償資料做接下來板子的板彎設定。
Stencil thickness-鋼板厚度
2) 元件
刪除元件清單–板上未刪除的元件數量。
檢測框–板上檢測框數量。
忽略框–板上設定不測的元件數量。
3) 3D 資料 Availibility
左 2D 門檻值(Low) –左燈取像時的最小灰階(低於設定值的就濾除)
左 2D 門檻值(High) –左燈取像時的最高灰階(高於設定值的就濾除)
左 Visibility 門檻值–左燈的信噪比(低於設定值的就濾除)
以上皆為前處理,如果 2D 門檻值(Low)設 0,2D 門檻值(High)設 255,
左 Visibility 門檻值設為 0,則代表不做任何降噪處理。
使用特殊遮罩當作合併時
左 2D 門檻值(Low)–2D 遮罩 左燈取像時的最小灰階(低於設定值的就濾除)
左 2D 門檻值(High)–2D 遮罩 左燈取像時的最高灰階(高於設定值的就濾除)
Test Research Inc.
192 TR7007 SII User Guide – Software
這個部分是關於 FOV 部分的顯示,由於 2D 合成原因,最低值為 0,最
高值為 150。