00197786-02_SI_SIPLACE_HeadVerification_DE.pdf - 第81页
6 Beschreibung der Testergebnisse 6.20 Segmentoffset oben und unten Software Manual SIPLACE Head Verification 03/2018 81 9 Der Segmentoffset dxDown wird aus dem Mittelwert der Segmentposition zur BE-Kame- ramitte bei ei…
6 Beschreibung der Testergebnisse
6.20 Segmentoffset oben und unten
80 Software Manual SIPLACE Head Verification 03/2018
6.20.2 Messergebnis
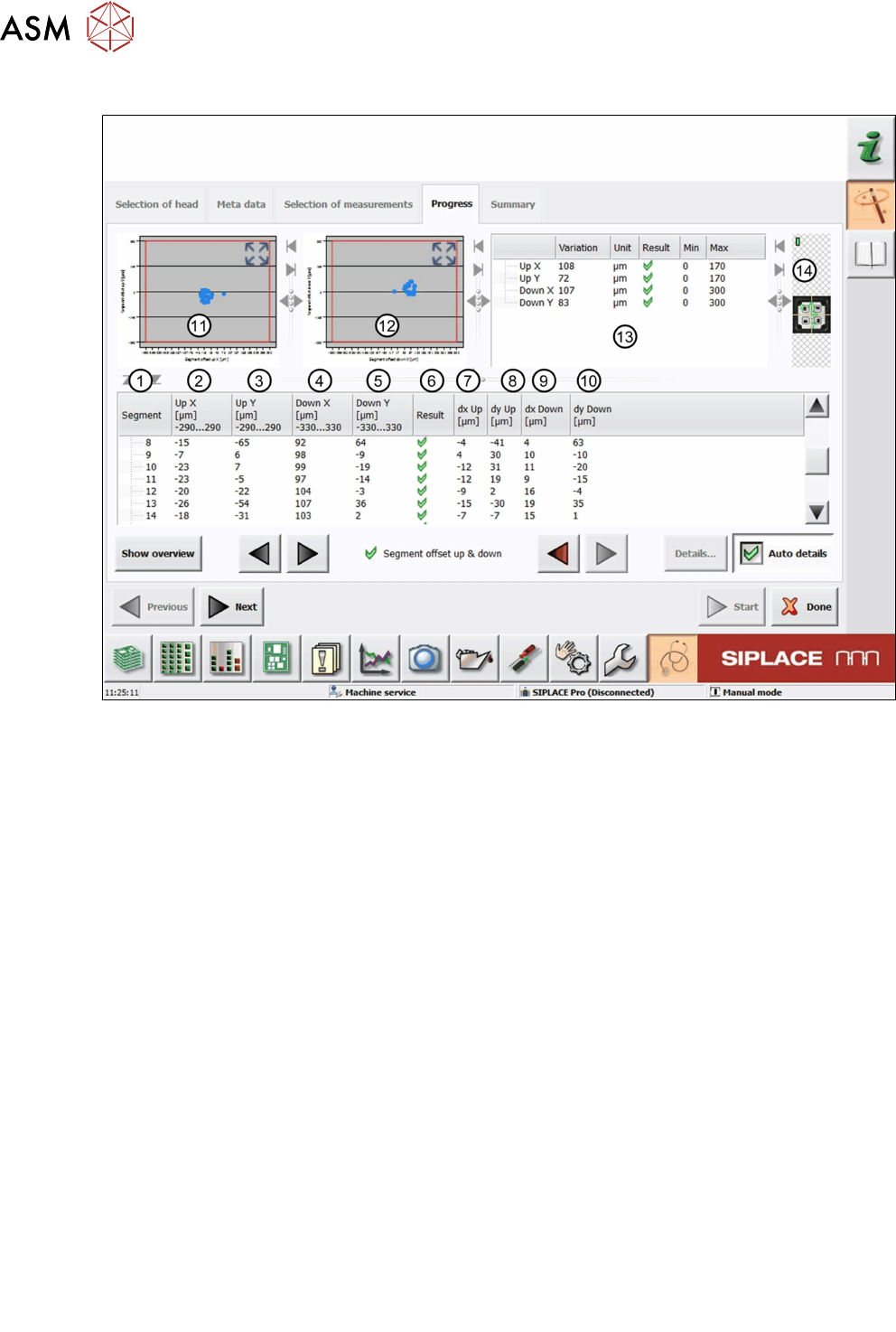
Abb.54: Ergebnisansicht – Segment offset up & down
1 Gemessenes Segment
2 Für das Segmentoffset UpX von Segment 1 wird eine andere Berechnung verwendet als
für alle anderen Segmente.
Für Segment 1 wird UpX aus dem Mittelwert der gemessenen X-Offsets (BE- zu LP-
Kamera) bei einem Winkel von 0°, 90°, 180° und 270° plus dem Wert dxUp berechnet:
UPX
Segment 1
= MeanOffsetX
0°, 90°, 180° und 270°
+ dxUp
Segment 1
Für alle anderen Segmente wird UPX mithilfe von Segment 1 als Referenzposition be-
rechnet:
UPX
Segment n
= UPX
Segment 1
- (dxUp
Segment 1
– dxUp
Segment n
)
3 Der Segmentoffset UpY wird auf die gleiche Weise wie für UpX berechnet:
UPY
Segment 1
= MeanOffsetY
0°, 90°, 180° und 270°
+ dyUp
Segment 1
UPY
Segment n
= UPY
Segment 1
- (dyUp
Segment 1
– dyUp
Segment n
)
4 Der Segmentoffset DownX wird auf die gleiche Weise wie für UpX berechnet:
DownX
Segment 1
= MeanOffsetX
0°, 90°, 180° und 270°
+ dxDown
Segment 1
DownX
Segment n
= DownX
Segment 1
- (dxDown
Segment 1
– dxDown
Segment n
)
5 Der Segmentoffset DownY wird auf die gleiche Weise wie für UpX berechnet:
DownY
Segment 1
= MeanOffsetY
0°, 90°, 180° und 270°
+ dyDown
Segment 1
DownY
Segment n
= DownY
Segment 1
- (dyDown
Segment 1
– dyDown
Segment n
)
6 Result-Anzeige mit Angabe, ob die Werte innerhalb (grüner Haken) oder außerhalb (rotes
Kreuz) der Grenzwerte liegen.
7 Der Segmentoffset dxUp wird aus dem Mittelwert der Segmentposition zur BE-Kamera-
mitte bei einem Winkel von 0°, 90°, 180° und 270° berechnet.
8 Der Segmentoffset dyUp wird aus dem Mittelwert der Segmentposition zur BE-Kamera-
mitte bei einem Winkel von 0°, 90°, 180° und 270° berechnet.
6 Beschreibung der Testergebnisse
6.20 Segmentoffset oben und unten
Software Manual SIPLACE Head Verification 03/2018 81
9 Der Segmentoffset dxDown wird aus dem Mittelwert der Segmentposition zur BE-Kame-
ramitte bei einem Winkel von 0°, 90°, 180° und 270° berechnet.
10 Der Segmentoffset dyDown wird aus dem Mittelwert der Segmentposition zur BE-Kame-
ramitte bei einem Winkel von 0°, 90°, 180° und 270° berechnet.
11 Graph mit Segmentoffset UpX (x-Achse) und Segmentoffset UpY (y-Achse).
12 Graph mit Segmentoffset DownX (x-Achse) und Segmentoffset DownY (y-Achse).
13 Zusätzliche Parameter zum Vergleich des kleinsten und größten ermittelten Wertes.
●
Up X = UpX max - Up Xmin
●
Up Y = UpYmax - UpYmin
●
Down X = DownXmax - Down X min
●
DownY = Down Y max - DownY min
6.20.3 Interpretation der erzielten Ergebnisse
"Up X"- und "Up Y"-Fehler bei allen Segmenten
Ursache Lösung
Fehlerhafte Nullpunktkorrektur des Sterns. ► Nullpunktkorrektur des Sterns prüfen.
"Down X"- und "Down Y"-Fehler bei allen Segmenten
Ursache Lösung
Linearlager der Z-Achse locker oder defekt. ► Z-Achse prüfen/austauschen.
"Up X"-, "Up Y"-, "Down X"- und "Down Y"-Fehler bei einzelnen Segmenten:
Ursache Lösung
Segment verbogen, möglicherweise nach
Crash.
► Segment (DP) austauschen.
Linearlager des Segments defekt ► Linearlager (DP) austauschen.
6 Beschreibung der Testergebnisse
6.21 Segmentoffset oben (SOO)
82 Software Manual SIPLACE Head Verification 03/2018
6.21 Segmentoffset oben (SOO)
6.21.1 Prinzip der Messung
Bei der Messung "Segment offset up" wird geprüft, inwieweit sich ein Segment in der oberen Posi-
tion außerhalb der Rotationsachse befindet. Diese Exzentrizität wird auch als Segmentoffset up be-
zeichnet.
Segment offset up ist der Offset der Segmentmitte in der Oben-Position zur Mitte der BE-Kamera.
Die Messung wird für jedes Segment in der oberen Position bei vier Winkeln (0°, 90°, 180° und
270°) durchgeführt, um die exakte Rotation zu bestimmen und den Einfluss der Segment/Z-Ach-
sen-Linearität zu berechnen.
HINWEIS
Segment offset down bei der HCS nicht verfügbar
Für die Messung "Segment offset down" ist eine stationäre Kamera erforderlich, die bei der
HCS nicht verfügbar ist. Daher steht der Test nur bei der Online-Überprüfung zur Verfü-
gung.
HINWEIS
Beenden der Testsequenz
Wenn sich bei einer Messung ein Segment außerhalb der zulässigen Grenzen befindet,
werden alle nachfolgenden Messungen beendet. Es wird davon ausgegangen, dass das
Segment stark verformt ist und der Kopf seine Funktion nicht mehr erfüllen kann.
► Tauschen Sie das Segment sofort aus, bevor Sie weitere Messungen durchführen.