YGOS V2用户操作手册.pdf - 第20页
1-10 1 基 板 程 序 的 生 成 和 编 辑 H : 目 前 下 料 枚 数 记 录 已 传 入 下 料 机 的 基 板 数 量 。 初 始 值 设 置 为 「 0 」 。 I : 预 定 下 料 枚 数 指 定 下 料 机 的 1 个 载 料 箱 可 以 容 纳 的 基 板 数 量 。 完 成 设 置 数 的 基 板 生 产 后 , 机 器 会 中 断 生 产 基 板 的 传 出 , 直 到 下 料 机 更 换 载…
1-9
1
基板程序的生成和编辑
4.1 基板参数
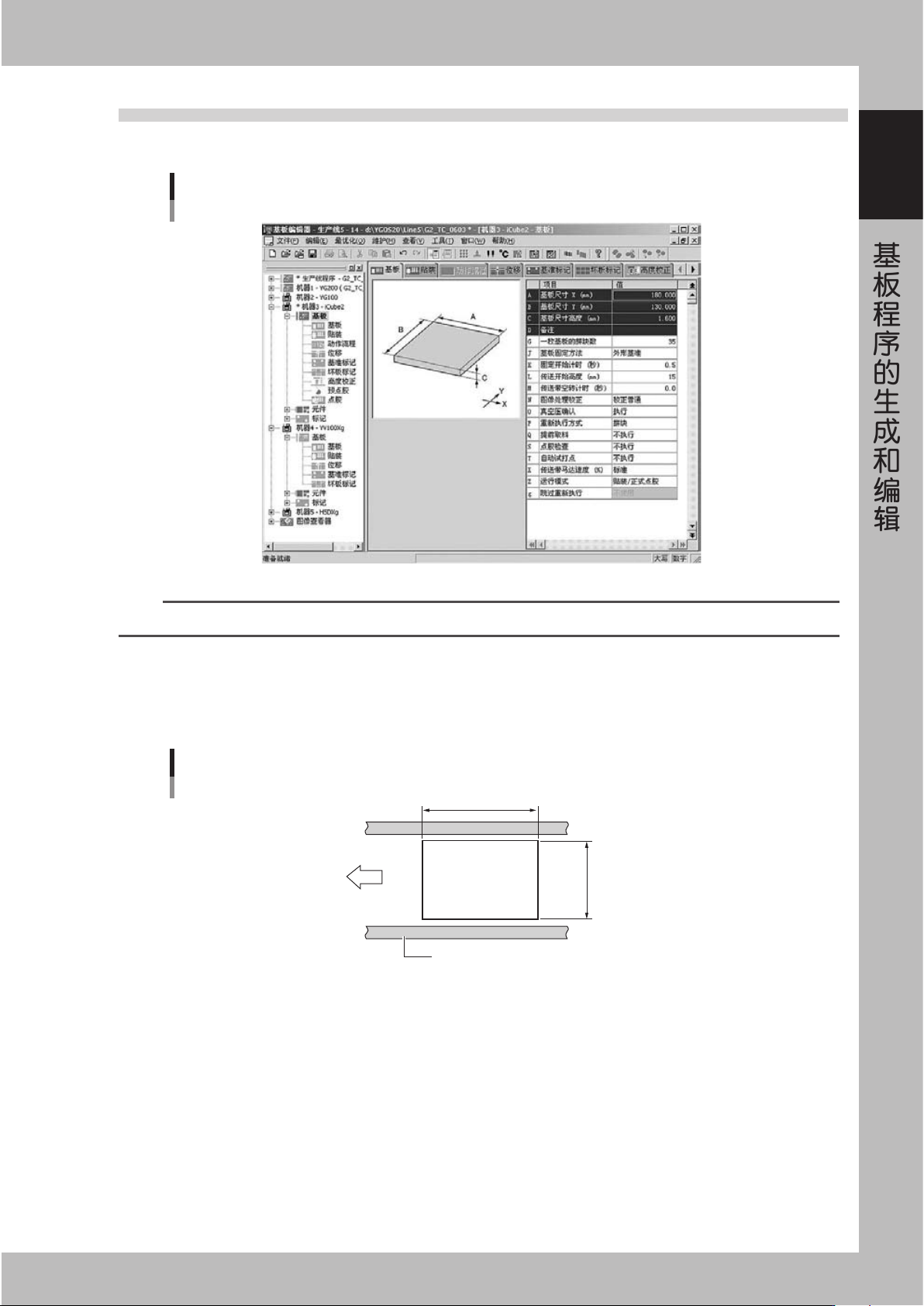
打开树状目录「基板」-「基板」(或主画面的「基板」图标)画面,确认或设置基板参数。
基板参数画面
66109-X6-00
参考
显示的项目随规格不同而各异。
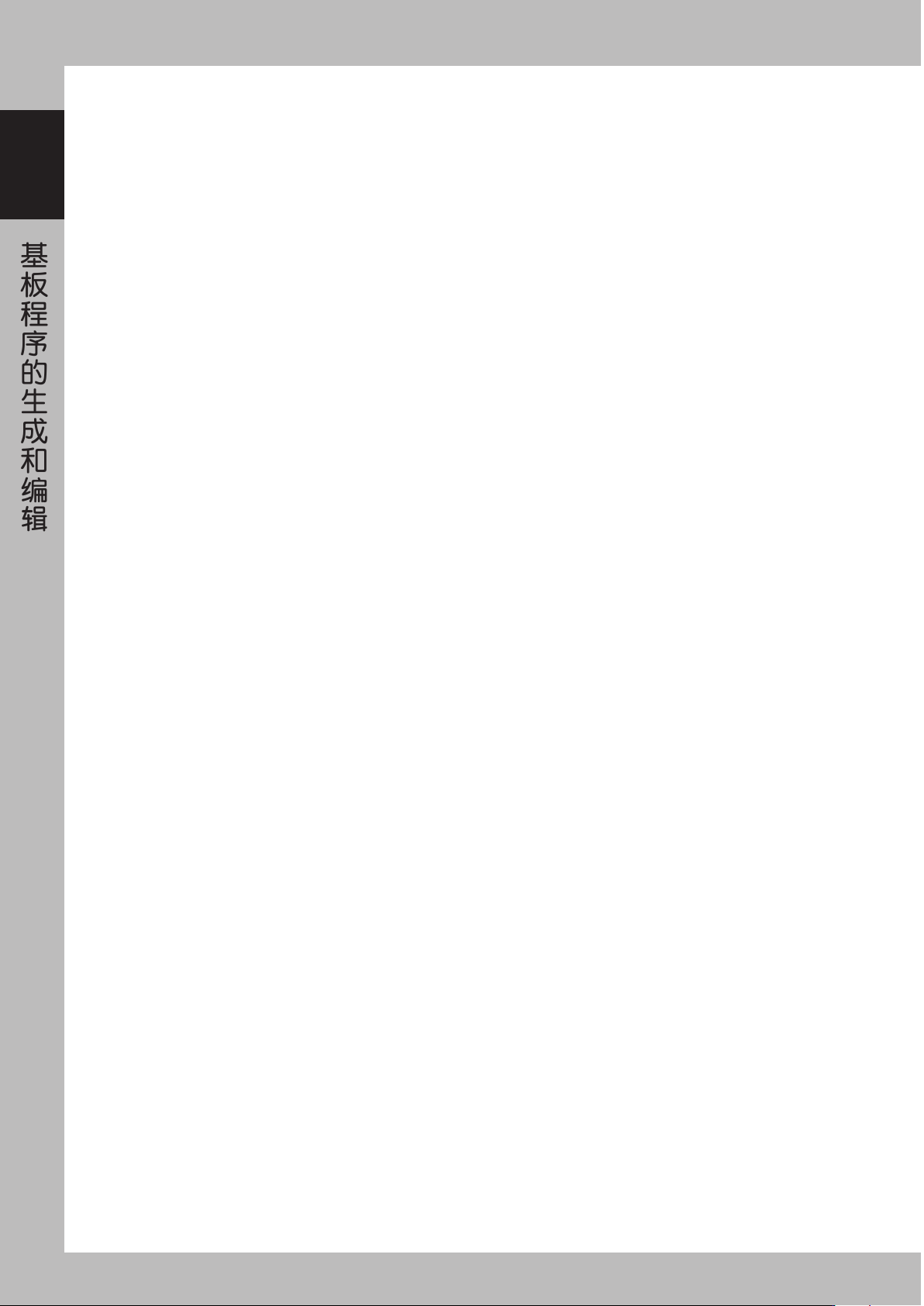
A、B:基板尺寸 X、Y
以 mm 为单位输入基板 XY 方向的尺寸。自动运行时,传送带宽度 (W 轴 ) 自动控制为 Y 的尺寸。
X:基板传送方向的尺寸
Y:放置基板时传送带宽度方向的尺寸
基板
X [mm]
Y [mm]
基板
基板传送方向
基板外形
传送轨道
65101-X6-00
C: 基板尺寸高度
以 1/100mm 为单位,输入所用基板的厚度。
D: 备注
记录有关基板的备注事项,空栏也无妨。
E: 目前生产枚数
记录已完成生产的基板数量。初始值设置为「0」。
F: 预定生产枚数
输入需生产的基板数量,输入「0」时,只要供给基板,生产就会持续。
G: 1 枚基板的拼块数
输入 1 枚基板中拼块的数量。
1-10
1
基板程序的生成和编辑
H: 目前下料枚数
记录已传入下料机的基板数量。初始值设置为「0」。
I: 预定下料枚数
指定下料机的 1 个载料箱可以容纳的基板数量。完成设置数的基板生产后,机器会中断生产基板的传出,直到下料机更换
载料箱。如果输入值为「0」,即使基板数量达到下料机可容纳的最大限度,生产也会连续进行。符合下列条件时,可以输入「0」。
·使用装有载料箱更换信号的下料机。
·设置在回流焊机前面的机器,使用该数据。
J: 基板固定方法
根据生产基板的种类,选择适当的固定方法。
·「外形基准」
从外侧固定基板的方法。
·「定位针」(选项装置)
只用定位针固定基板的方法。该固定方法为选项设置。
·「顶针」(选项装置)
通过定位针和顶针固定基板的方法。
K: 固定开始计时
基板一通过主挡板近前方的基板检出传感器,机器就开始固定基板的动作。因为基板尺寸和传送速度各异,所以机器开始固
定基板的时机也不相同。可以通过设置该参数推迟机器开始固定基板的时机。在 0.0 〜 1.9 秒的范围内输入。
L: 传送开始高度
贴装后,顶针装置一下降便立即向传送带出口传送基板。如果基板背面已贴有元件,不完全降下顶针装置就传送基板,会发
生元件与装置相碰撞的现象。这时,可以通过该参数分别指定各种基板顶针装置的下降高度。如果将基板固定后的顶针高度
作为 0mm,则输入从该位置下降几 mm 为传送开始高度。可以在 3 〜 30mm 的范围内输入。
M: 传送带空转计时
如生产基板为普通形状,设置为「0 秒」。
如生产基板为特殊形状 ( 缺口、中间镂空等 ),传送带出口传感器在运出基板时容易发生误识别现象。这时如果设置传送带
空转时间,即使关闭基板检出传感器,传送带在设置的时间内还会转动,这样就可以完成传出基板的作业。在 0.0 〜 9.9 秒
的范围内输入。
N: 图像处理校正
设置为「校正普通」。因为设置为「校正普通」后,可以在吸附元件时实施图像识别检查。
O: 真空压确认
设置为「执行」。因为设置为「执行」后,可以通过视觉识别和真空压确认两方面确认吸嘴是否吸附着元件。
P: 重新执行方式
选择在贴装中发生吸附、识别错误时的重新执行方式。
·「组」
继续重新执行,直至 1 个贴装组的生产完成。但不可进行贴装头的更换。
·「拼块」
如果发生了错误,完成该拼块的贴装后,由发生错误的贴装头重新贴装。
·「自动」
如果发生了错误,完成该拼块的贴装后,不必由发生错误的贴装头,只需用空着的贴装头重新执行即可。
Q: 提前取料
一般设置为「不执行」。
如果设置为「执行」,当前一块基板的生产完成后,在传入下一块基板的同时就开始元件的吸附和识别。这样可以缩短生产
的单位时间。
R: 托盘元件优先
供给托盘元件,一般设置为「执行」。这样可以配合托盘元件的供给状态,以最短的单位时间进行托盘元件的吸附和贴装。
S: 点胶检查
如设置为「执行」,就会对已涂的胶点进行图像识别,根据预点胶数据指定的标记序号,检查点胶液是否用完,点胶嘴是否
堵塞,是否存在拉丝、拖尾现象等。
1-11
1
基板程序的生成和编辑
T: 自动试打点
在打点站进行试点胶。
U: 引脚翘起检出 /3D 共面度检测
具备引脚翘起检出功能(选项功能)的机器或配备了 3D 共面度检测仪的机器,在使用该功能时设置为「使用」,不使用
该功能时,设置为「不使用」。
V: 传送带 Y 轴速度
因传送带 Y 轴的运转,使已贴装的元件发生了位置偏移时,可以变更传送带 Y 轴的速度。
W:传送方法
从「单个传送」和「多个传送」中选择。一般设置为「单个传送」。
X: 传送带马达速度(%)
设置传送马达(传送基板)速度。以在「机器设置」画面中设置的数值为标准,10% 为单位,“+”侧可以在 10% 〜 50%,“-”
侧可以在 10% 〜 90% 的范围内设置。
Y: 传入前元件高度(mm)
取在上道工序所贴装的元件的最大高度值来设置。
设置的高度至少保证要使贴装头在基板上方移动时不与该高度的元件相碰撞。
Z: 运行模式
从「贴装/正式点胶」和「动作流程」中选择一个。如果选择「贴装/正式点胶」,「贴装」图标和「点胶」图标有效。如果
选择动作流程,「动作流程」图标有效,而「点胶」图标无效。
g: 跳过重新执行
设置因元件吸附错误、元件识别错误和元件用完等原因而不能使用元件时是否贴装其它可以使用的元件。