5OM-1839-001w_F8S.pdf - 第152页
4-1-44 5OM-1839 1603-001 ロボットケーブル接続図 -X131P1 :A2 :A1 :A3 -X131P1 :B3 :B4 :B5 :B1 :B2 :C2 :D2 :D1 :1A -A31:CNP1 :5A :1 U02:X1 :3 :2 :4 :1 -A31:CN1A :2 :1 U02:CN2 :2 :3 :4 :5 :6 :7 -A31:CN1B [B2-1A] [B1-1B] [B1-1B] [B3-3B]…
4-1-43
5OM-1839
1603-001
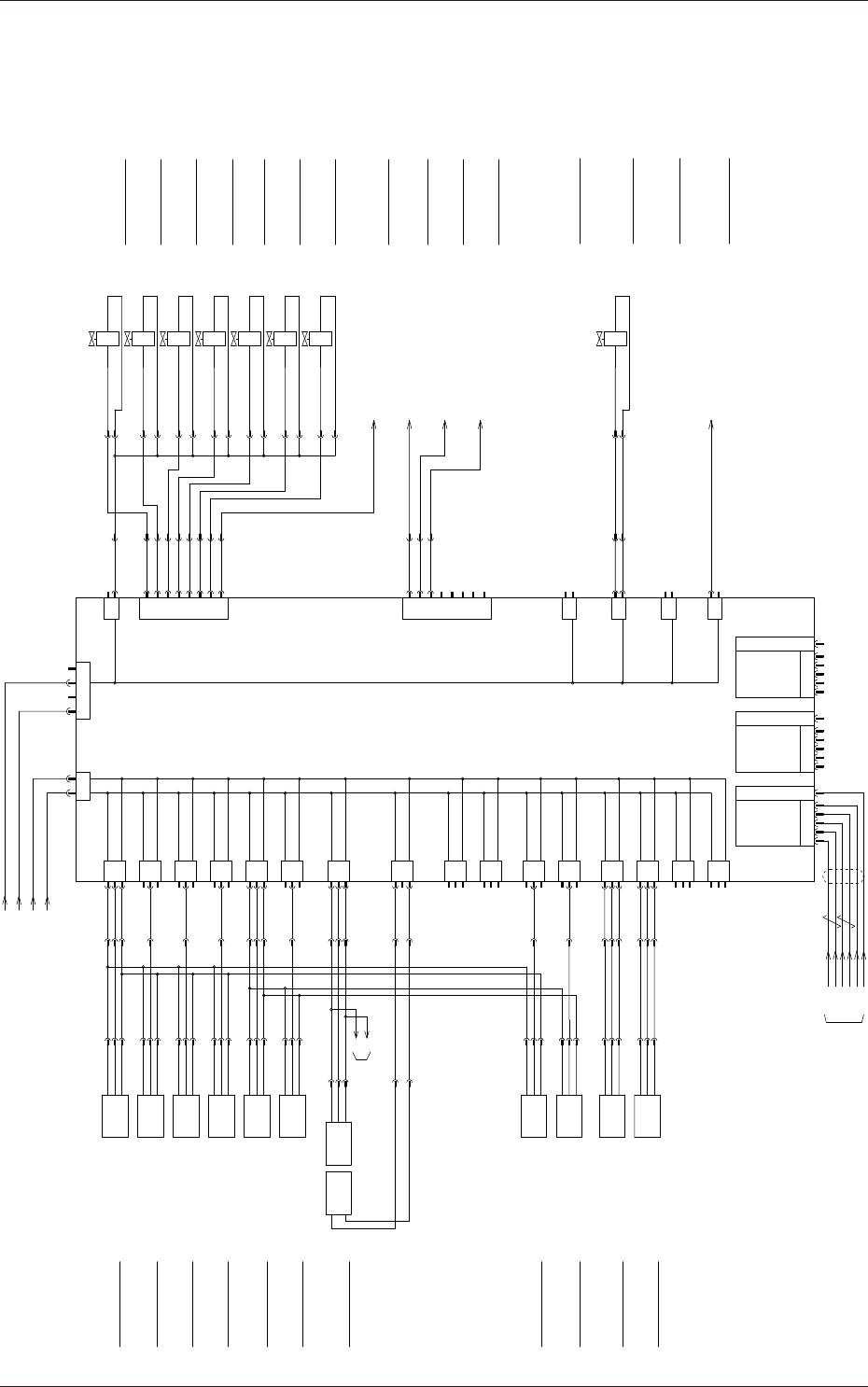
搬送 IO 基板 U14 部
24A6
10
10
24A3
N-X136
N-X131
N-X130
N-B130
N-B130
:3
+
OUT
-
:2
:1
N-B136
+
OUT
-
N-B136T
-
+
N-B1136
:3
:2
:1
可動シュート
バックアップピンセンサ1
N-X132
N-X133
N-B131
+
OUT
-
N-B132
N-B132
:3
+
OUT
-
:2
:1
N-B133
+
OUT
-
N-Y112
BK R
S1Zクランプ シリンダバルブ1
S1Zクランプ シリンダバルブ2
(A:降下)
(B:上昇)
基板ストッパ1 昇降バルブ
N-Y113
BK R
N-Y110
:1
:2
N-Y110
BK R
N-Y111
:3
:4
BK R
N-Y114
N-X114
BK R
[02-3C]
[02-3A/3B]
IN OUT
CN10
1 2
3X2X1 21
CN26
1
2
3
3
2
1
3
2
1
3
2
1
3
2
1
3
2
1
1
2
3
1
2
3
1
2
3
1
2
3
3
2
1
2
1
CN40
CN39
CN38
CN37
CN36
CN35
CN34
CN33
CN32
CN31
CN30
1
2
4
N-X1X1
N-X1X2
I/O P.C.B
U14
B302:5
基板停止センサ 装着部1リモート
基板停止センサ 装着部1リモート
B302:10
基板停止センサ 装着部2リモート
基板停止センサ 装着部2リモート
[C2-2B]
基板ストッパ2 昇降バルブ
N-Y115
BK R
S2Zクランプ シリンダバルブ1
S2Zクランプ シリンダバルブ2
(A:降下)
(B:上昇)
基板ストッパ1 下限検出
基板ストッパ1 上限検出
基板ストッパ2 下限検出
基板ストッパ2 上限検出
N-X110
N-X126
N-X134
N-X135
N-B134
N-B134
:3
+
OUT
-
:2
:1
N-B135
:6
+
OUT
-
:5
:4
基板ストッパ3 下限検出
基板ストッパ3 上限検出
基板ストッパ3 昇降バルブ
N-Y116
BK R
B305:5
基板停止センサ 装着部3リモート
基板停止センサ 装着部3リモート
B305:10
基板停止センサ 装着部4リモート
基板停止センサ 装着部4リモート
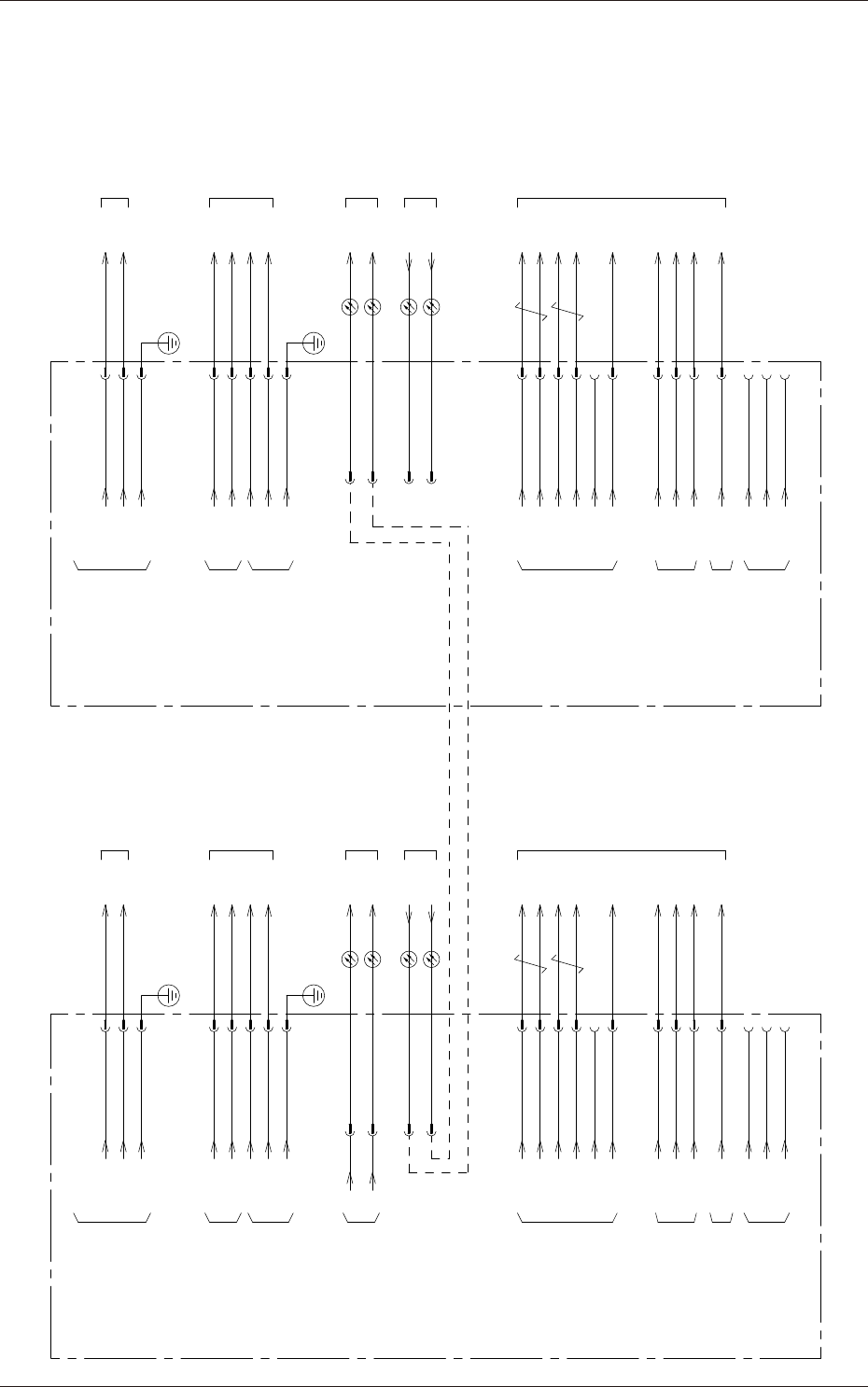
注記
1.ドレイン線はコネクタケースに接続される。
2.N-I/O1,N-I/O2,N-I/O3コネクタにはAレーン識別ラベルが付与する。
CN23
CN25
1
2
3
3
2
1
3
2
1
3
2
1
3
2
1
CN45
CN43
CN42
CN41
CN24
1
2
1
2
1
2
CN44
UP_RXD_0(+)
FG(コネクタケース)
2 61 3
UP_RXD_0(-)
UP_TXD_0(+)
UP_TXD_0(-)
DN_RXD_0(+)
DN_RXD_0(-)
DN_TXD_0(+)
DN_TXD_0(-)
4
SG
SG
FG(コネクタケース)
2 61 3 4
注1注1
T_RXD_0(+)
T_RXD_0(-)
T_TXD_0(+)
T_TXD_0(-)
SG
FG(コネクタケース)
2 61 3 4
注1注1
CN1 CN2 CN3
N-X125
X10144:1
[18-5B]
コンベア緊急停止(UC18)
バックアップピン用
:1
:2
:3
:6
:4
:1
:2
N-B1136T
N-X140
B0840
N-B140
:3
+
OUT
-
:2
:1
B0841
N-B141
:3
+
OUT
-
:2
:1
S1固定Zクランプ下限検出
S2固定Zクランプ下限検出
N-X141
[C2-2B]
[C2-2C]
[C2-2C]
BL
BK
BR
BL
BK
BR
BL
BK
BR
BL
BK
BR
BL
BK
BR
BL
BK
BR
BL
BK
BR
BL
BK
BR
BL
BK
BR
BL
BR
STLT_CNVR
B LANE
未接続
未接続
(内部ロジック)
基板ストッパ4 昇降バルブ
N-X123
N-Y117
:1
:2
Y117
BK R
N-X142
N-X143
N-B142
B142
:3
+
OUT
-
:2
:1
N-B143
:6
+
OUT
-
:5
:4
基板ストッパ4 下限検出
基板ストッパ4 上限検出
BL
BK
BR
BL
BK
BR
:17
:18
:11
N-I/O2
:12
:13
N-I/O2
3
4
5
6
7
8
:16
:15
:14
:19
:19
:20
N-I/O2
:21
:6
:5
:8
:7
:2
:1
:4
:3
:6
:5
:1
:2
N-I/O3
CN11-22
2
1
:3
N-I/O3
:4
:5
:6
:7
:8
N-I/O1
:10
:11
:12
:13
:14
:15
:23
:25
:18
:22
:24
:17
:19
:20
:21
:16
:26
N-X137
:6
:5
:4
:6
:5
:4
:2
:1
to N-B1301
[C3-2A]
CN27
1
2
N-X127
3
4
5
6
7
8
X0803
U08(搬送IO)
[C6-2D]
4-1-44
5OM-1839
1603-001
ロボットケーブル接続図
-X131P1
:A2
:A1
:A3
-X131P1
:B3
:B4
:B5
:B1
:B2
:C2
:D2
:D1
:1A
-A31:CNP1
:5A
:1
U02:X1
:3
:2
:4
:1
-A31:CN1A
:2
:1
U02:CN2
:2
:3
:4
:5
:6
:7
-A31:CN1B
[B2-1A]
[B1-1B]
[B1-1B]
[B3-3B]
[B3-3A]
X10202
:A1
:B1
:A5
:A2
:B2
48D3
10D
アース
-X231P1
:A2
:A1
:A3
10
24A6
10
24A
アース
-X231P1
:B3
:B4
:B5
:B1
:B2
-X1311A
(:2)
(:1)
-X1311B
(:2)
(:1)
IO
:1
:2
:3
:4
ケース
TX
-TX
RX
-RX
FG
ヘッドILB
[17-5A/5C]
基板高さ(OP)
ヘッドIL
DC48V電源
[02-12A/12C]
DC24V(B)
DC24V(A)
[02-7E/7F]
[02-7C/7D]
SSCNET
[42-5A/43-5A]
OP
:3
:4
:2
:1
[17-2A/2C]
-X31P1
-X02X1
-X311A
-X311B
X0202
U01(UC18)
本体側
(後)
CPU2:U82(1CH)
:1
:2
:1
:2
:1
:2
U01(UC18)
CPU2:U83(2CH)
RX
-RX
SG
:C1
:C4
:D4
予備(OP)
:6
:7
:8
:C3
:8
:10
:A3
:5
SG
-X131P1
:A2
:A1
:A3
-X131P1
:B3
:B4
:B5
:B1
:B2
:C2
:D2
:D1
:1A
-A31:CNP1
:5A
:1
U02:X1
:3
:2
:4
:1
-A31:CN1A
:2
:1
U02:CN2
:2
:3
:4
:5
:6
:7
-A31:CN1B
[B2-1A]
[B1-1B]
[B1-1B]
[B3-3B]
[B3-3A]
X10202
:A1
:B1
:A5
:A2
:B2
48D3
10D
アース
-X231P1
:A2
:A1
:A3
10
24A6
10
24A
アース
-X231P1
:B3
:B4
:B5
:B1
:B2
-X1311A
(:2)
(:1)
-X1311B
IO
:1
:2
:3
:4
ケース
TX
-TX
RX
-RX
FG
ヘッドILB
[17-5B/5D]
基板高さ(OP)
ヘッドIL
DC48V電源
[02-12A/12C]
DC24V(B)
DC24V(A)
[02-7E/7F]
[02-7C/7D]
SSCNET
OP
:3
:4
:2
:1
[17-2B/2D]
-X31P1
-X02X1
-X311A
-X311B
X0202
U01(UC18)
本体側
(前)
:1
:2
:1
:2
:1
:2
U01(UC18)
RX
-RX
SG
:C1
:C4
:D4
予備(OP)
:6
:7
:8
:C3
:8
:A3
:5
SG
:10
4-1-45
5OM-1839
1603-001
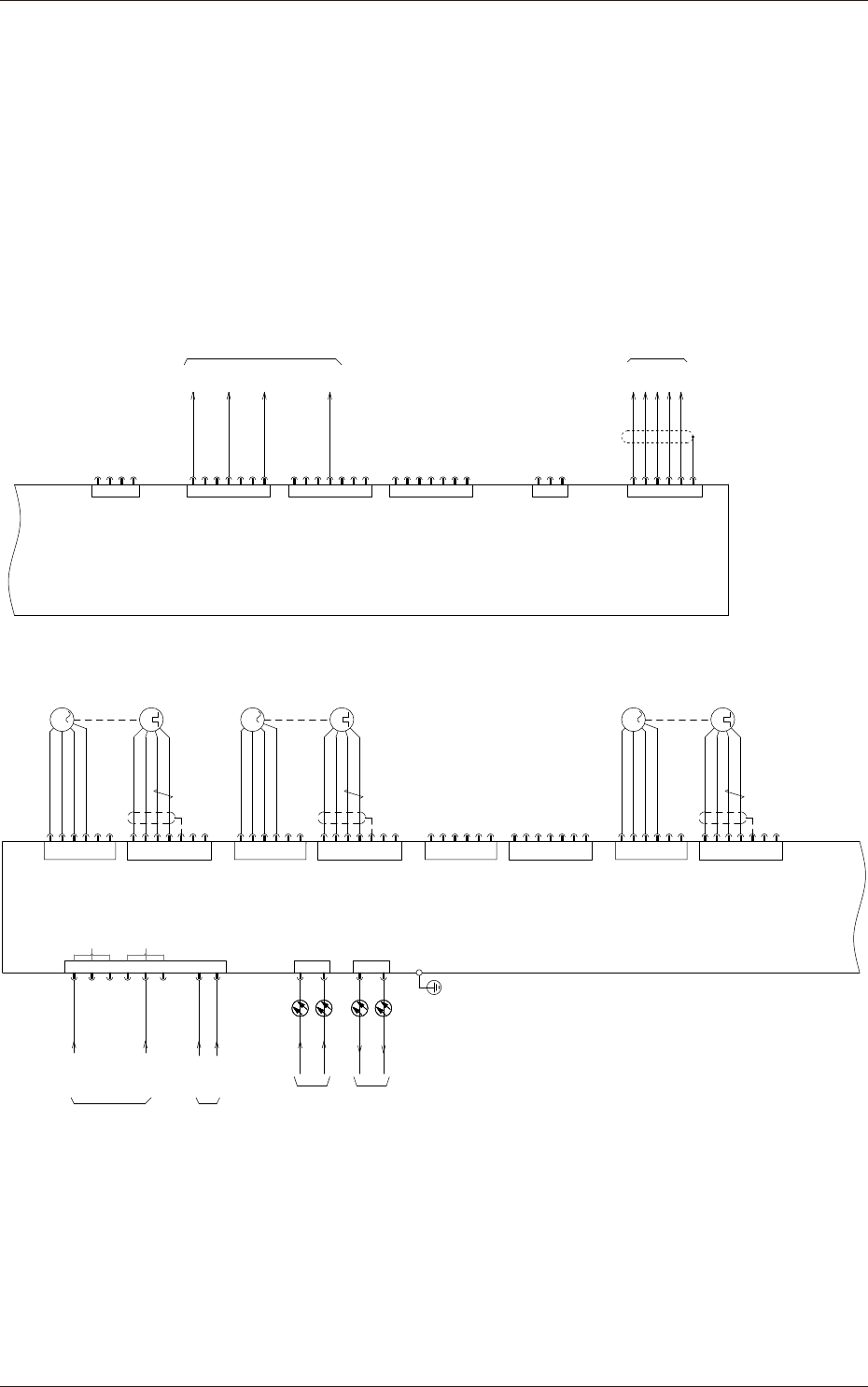
サーボモータ部
A31
DC24V
制御回路電源
主回路電源
DC48V
U02(CN1)
[B1-2B]:(後)
[B3-2B]
SSCNET
Servo Motor AMP
[B1-2B]:(後)
3
M
MRR
P5G
MR
P5
U
SSG
DD
M31
V
W
E
B1
B2
MDR
SHD
MD
B2_C
[B1-4B]:(前)
[B1-4B]:(前)
SSCNET
[B1-2B]:(後)
N.C.(前)
B1_C
B2_D
B1_D
VV
1
2
3
4
5
6
7
X314B
CN4B
1
2
3
4
5
6
7
X314D
CN4D
1
2
3
4
5
6
7
X314C
CN4C
1
2
3
X3103
CN3
24A P24I
DI1
DI2
DI3
DO1
DO2
SGI
P24I
DI1
DI2
DI3
DO1
DO2
SGI
P24I
DI1
DI2
DI3
DO1
DO2
SGI
DICOM
EMG
DOCOM
A31
1
5
7
13
X3105
3
CN5
PA1
PAR1
PB1
PBR1
GND
:1
:2
:3
:4
:8
LINE SENSOR(CN5)
[B3-6C]
U03
2B
1A
2A
1B
3A
3B
4A
4B
1A
1B
5A
2A
2B
CNP2A
X31P2A
X312A
CN2A
3
M
SSG
NS
M32
X31P2B
X312B
3
M
SSG
NL
M33
X31P2D
X312D
1A
1B
2A
4B
5A
5B
6A
6B
P48M
P48G
1
2
1
2
P24M
P24G
1
2
3
4
X31P3
CNP3
10
48D3
10D
CN1B
X311B
CN1A
X311A
CNP1
X31P1
X0201:8
X131P1:A2
X131P1:A1
X0201:7
:6
X0201
:1
:5
:2
HEAD ILB(CN1)
[B3-2B]
U02
MRR
P5G
MR
P5
U
V
W
E
B1
B2
MDR
SHD
MD
VV
2B
1A
2A
1B
3A
3B
4A
4B
1A
1B
5A
2A
2B
CNP2B
CN2B
MRR
P5G
MR
P5
U
V
W
E
B1
B2
MDR
SHD
MD
VV
2B
1A
2A
1B
3A
3B
4A
4B
1A
1B
5A
2A
2B
CNP2C
CN2C
MRR
P5G
MR
P5
U
V
W
E
B1
B2
MDR
SHD
MD
VV
2B
1A
2A
1B
3A
3B
4A
4B
1A
1B
5A
2A
2B
CNP2D
CN2C
X0305
16
SD