00192809-01 - 第76页
8 Autom atic track ing User M anual V 1.15 - Productivity Lift 8.2 Automatic t racking via CAN-B us Software version V 40.1 1 Edition 01/2001 68
User Manual V 1.15 - Productivity Lift 8 Automatic tracking
Software version V 40.11 Edition 01/2001 8.1 Automatic tracking via hybrid light barriers
67
$XWRPDWLFWUDFNLQJ
The Productivity Lift can be fitted with two types of automatic tracking.
1. Tracking via hybrid light barriers
2. Tracking via CAN bus
$XWRPDWLFWUDFNLQJYLDK\EULGOLJKWEDUULHUV
The system is equipped with an automatic tracking facility for the transport width.
In the automatic operating mode, the transport width is tracked automatically. Built-in hybrid light
barriers detect the position of the mobile transport cheek of the previous or following device and
automatically adapt the transport width of the lift. The sensor mechanism detects the direction in
which adjustment is made and proceeds accordingly. If signals overlap, a reference run is per-
formed. In this case, the width setting is increased to the maximum width and then the transport
width is reset.
$XWRPDWLFWUDFNLQJYLD&$1%XV
The lift is connected to other systems via a CAN bus. The data for the current width are transferred
via this CAN bus. The configuration of the lift determines which system is responsible for the width
and how the width is queried and checked.
Communication via CAN bus is only possible with our systems.
8 Automatic tracking User Manual V 1.15 - Productivity Lift
8.2 Automatic tracking via CAN-Bus Software version V 40.11 Edition 01/2001
68
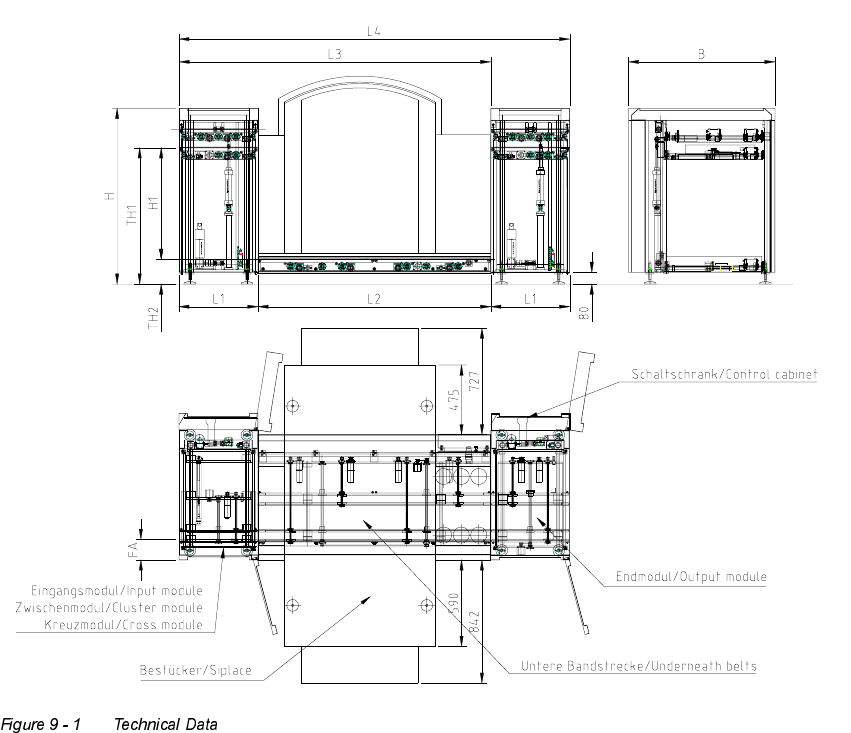
User Manual V 1.15 - Productivity Lift 9 Technical Data
Software version V 40.11 Edition 01/2001
69
7HFKQLFDO'DWD
,QVWDOODWLRQDQGRSHUDWLRQLQVWUXFWLRQV
For the installation and operation of the productivity lift the following advises have to be observed:
1. Area load allowed for undercover 0,2 t/m²
2. Room temperature 15°C to 35°C
3. Humidity in the area 30% to 70%
4. Average humidity ≥ 45%