TR7700_SII_DL_Software_ch-v4.8_20130515.pdf - 第475页
Test Research Inc. TR 7700 S II DL Us er Gui de – Software 461 2. 使用 Color Spac e 擷取出想要的焊盤色彩區域。 3. 使用 Get Color 將 Color Space 內的色彩參數套用到比對條檢視窗內。
Test Research Inc.
460 TR7700 SII DL User Guide–Software
4.10.2.25 Pad 框
根據 Pad 的顏色與色彩空間(Color Space)的方式來檢測 Chip 元件的位置,主要是用
來定位其他有影像的檢測框例如[Missing]、[Lead]和[Chip]框(使用連結功能)。Color
Space 的操作請參閱 5.5.10 色彩空間。
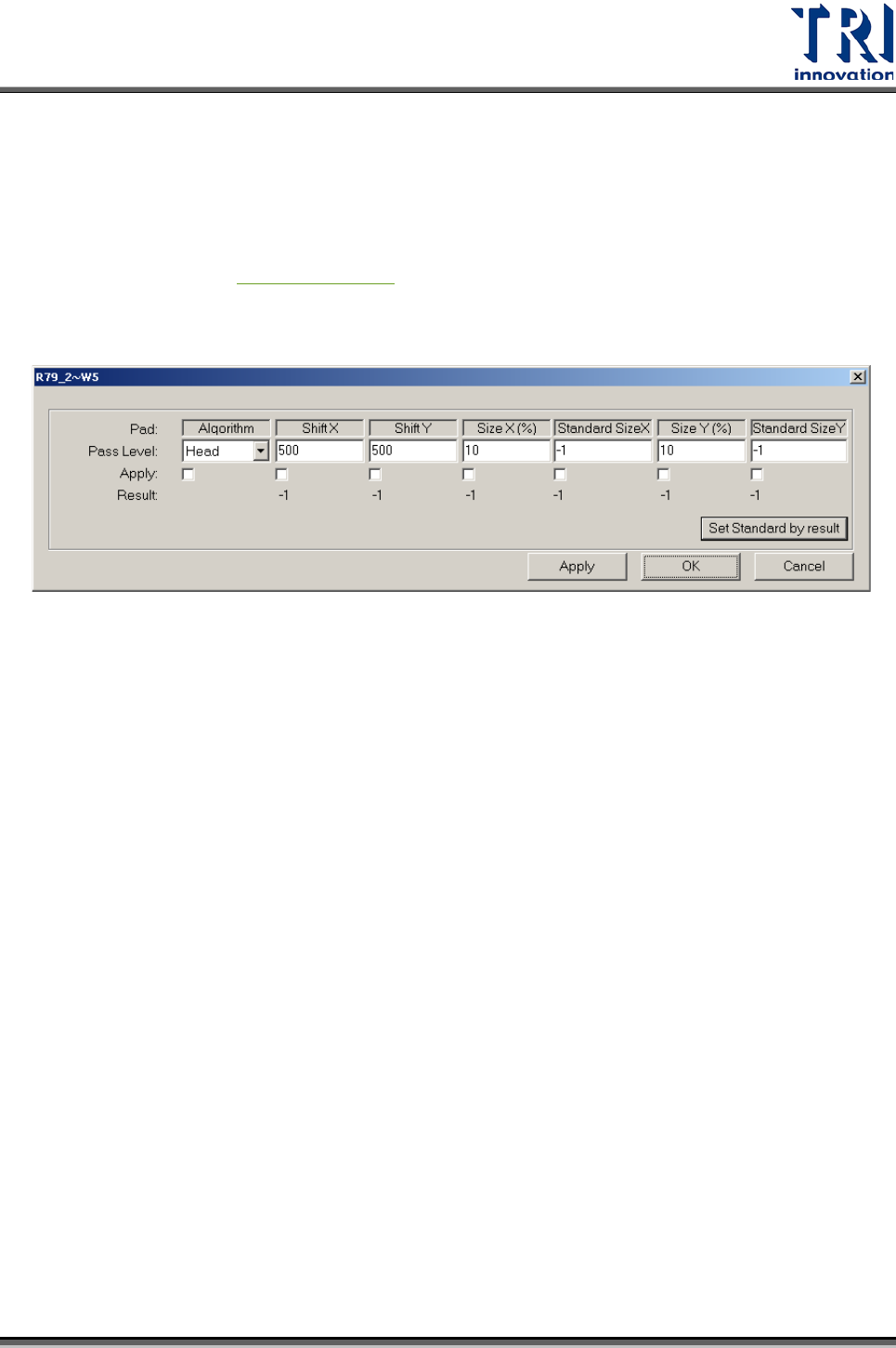
[Train]模式下的檢測參數設定畫面:
參數說明:
位置偏移值 (Shift X/Shift Y,預設 500 µm):設定 Chip 中心點與檢測框中心點的
距離容許值。
旋轉角度 (Rotation,預設預設 8):設定 Chip 旋轉角度的容許值。
尺寸比例(Size X/Size Y(%),預設為 20%):設定標準尺寸與檢測框大小差異百分
比的容許值。
標準尺寸(Standard Size):設定 Chip 元件的標準尺寸。
Set Standard by result:將檢測框大小設定為標準值。
使用說明:
在 Library 下:
1. 新增一個檢測框移動到 Chip 元件上。
2. 使用 Color Space 擷取出想要的焊盤色彩區域。
3. 使用 Get Color 將 Color Space 內的色彩參數套用到屬性視窗內。
4. 設定 Pad window 框的參數設定即完成。
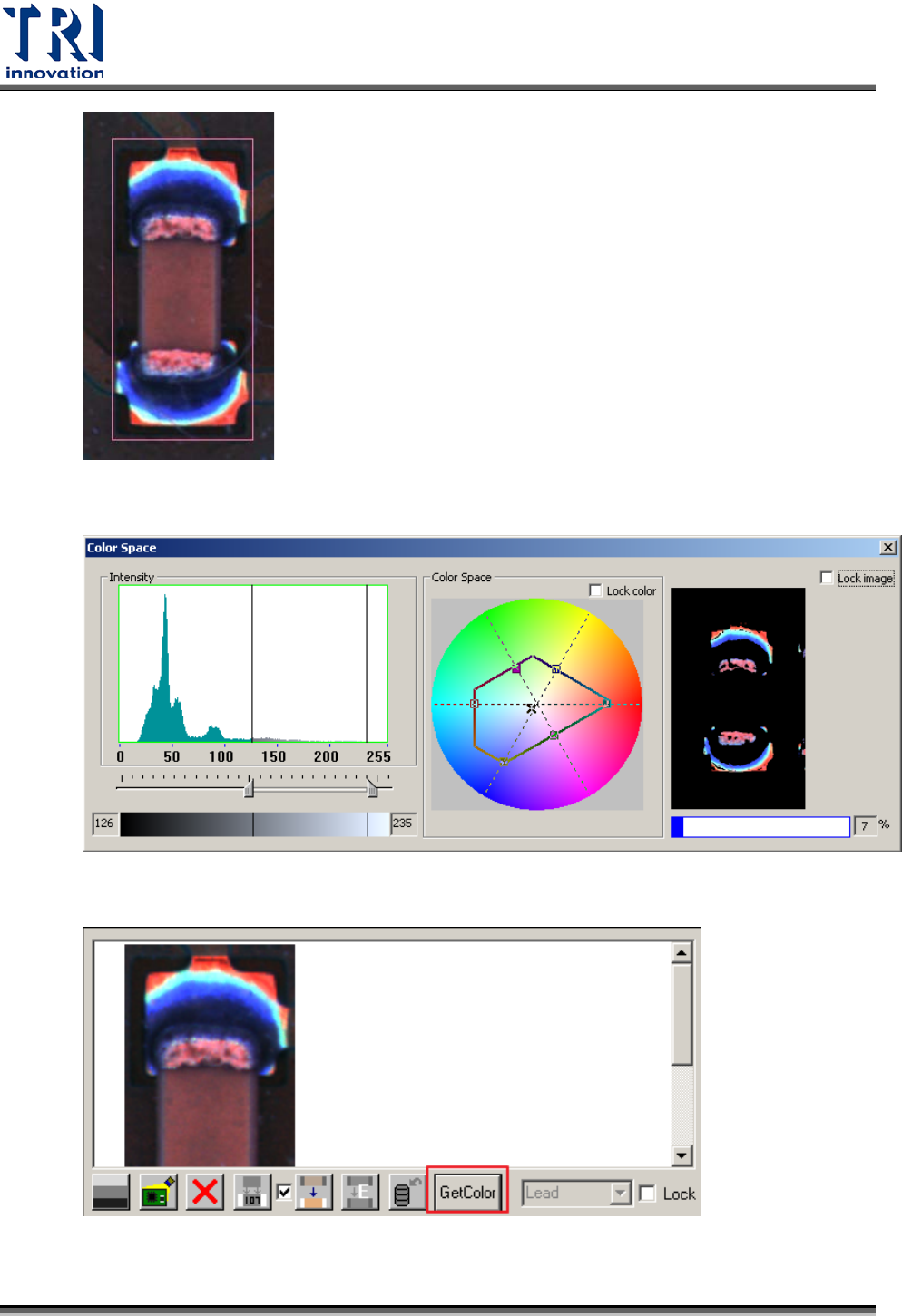
在 Train 模式下:
1. 將萬用框移動到 FOV 影像中 Chip 元件上。
Test Research Inc.
TR7700 SII DL User Guide–Software 461
2. 使用 Color Space 擷取出想要的焊盤色彩區域。
3. 使用 Get Color 將 Color Space 內的色彩參數套用到比對條檢視窗內。

Test Research Inc.
462 TR7700 SII DL User Guide–Software
4. 設定 Pad window 框的參數設定即完成。
4.10.3
CCM 色差比對法及 RGB WEIGHTING 權重設定
4.10.3.1 色差比對法 (Color Check Method)
上方攝影機(Top-View)是採用 3 個 CCD 感光感應器(Sensor)之攝影機,因此在針對各
檢測框之影像,配合 RGB 三原色的擷取及權重設定,能呈現出一般黑白攝影機所無
法呈現之色差大的影像。針對上方攝影機所做的各式檢測框,能有較佳的影像對比之
品質,造成黑白對比反差較大而易於檢測出元件缺陷,在此稱為「CCM 色差比對法
(Color Check Method)」。
Chip 類為例,左圖為黑白攝影機之影像,右圖為彩色攝影機經過 RGB Weighting 所
取得之影像。
SOP 類為例,左圖為黑白攝影機之影像,右圖為彩色攝影機經過 RGB Weighting 所
取得之影像。