M20_Ope_E - 第174页
Chapter 5 Libraries 5-24 Automatic Nozzle ID Recognition Click <Scan Nozzles> button. The head segments move above the beam camera (above the scan camera on the M6/M6ex/M6ez), and the camera sca ns each head for …
Chapter 5 Libraries
5-23
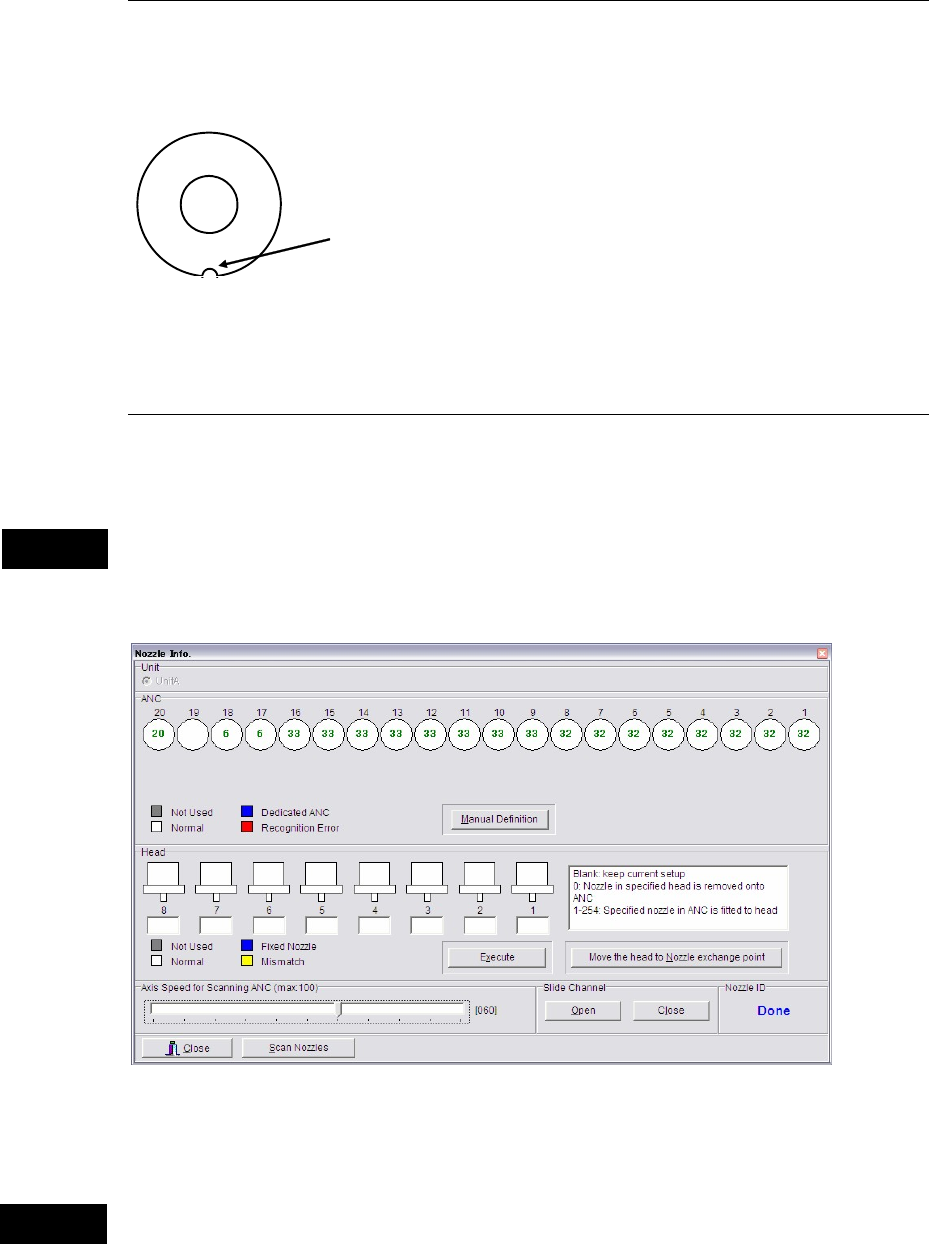
5-1-2-1 Setting Nozzles to ANC
Set nozzles to use to available ANC stations. Open the ANC shutter in advance, Nozzle
Info.>Slide Channel>Open. When setting them, fit the nozzle cutoff to the positioning pin in
the ANC station and insert the nozzle vertically.
Cutoff
Nozzle Top view
Note: When the head assembly or XY shafts locate above the ANC station, make enough space to
work. Click the <Move the head to Nozzle exchange point> button.
5-1-2-2 Setting Nozzles to Heads
Menu: Manual>NozzleInfo.
This system is capable of automatic nozzle setting to a head.
Do not manually attach a nozzle to a head. If a nozzle is not attached properly, it can hit other
parts of the machine to result in head damage.
This menu allows you to see which nozzles are on the heads and in ANC.
* The number of units and heads
varies according to machine
models and types.
ANC operation allows a head to move. When using this menu, do not stick head, hands,
or other parts of the body inside the mounter. Serious injury can result. Also make sure
non-operators are a safe distance from the machine.
Caution
Warning
Chapter 5 Libraries
5-24
Automatic Nozzle ID Recognition
Click <Scan Nozzles> button.
The head segments move above the beam camera (above the scan camera on the
M6/M6ex/M6ez), and the camera scans each head for nozzle presence.
Then, the main teach camera scans the ANC to read the nozzle ID labels. The heads remove
nozzles and put them onto available nozzle stations.
1
The main teach camera scans the remaining nozzles that have been removed from the heads.
The result is shown in [ANC] table. [Head] table shall be blank since all the nozzles have been
removed from the heads.
To attach a specific nozzle to a specific head for ADA or the image test, enter the nozzle number,
and click <Execute> button. When ADA or image test finished, to remove the nozzle and place
it to a nozzle station, enter the head with the nozzle and nozzle number=0. Then click
<Execute> button.
Note: This operation can be performed in Prearrange> [ANC] tab>Manual Nozzle Operation.
Note: On the M7, Automatic Nozzle ID Recognition is performed at all units at the same time.
When actuating manually, Unit must be selected.
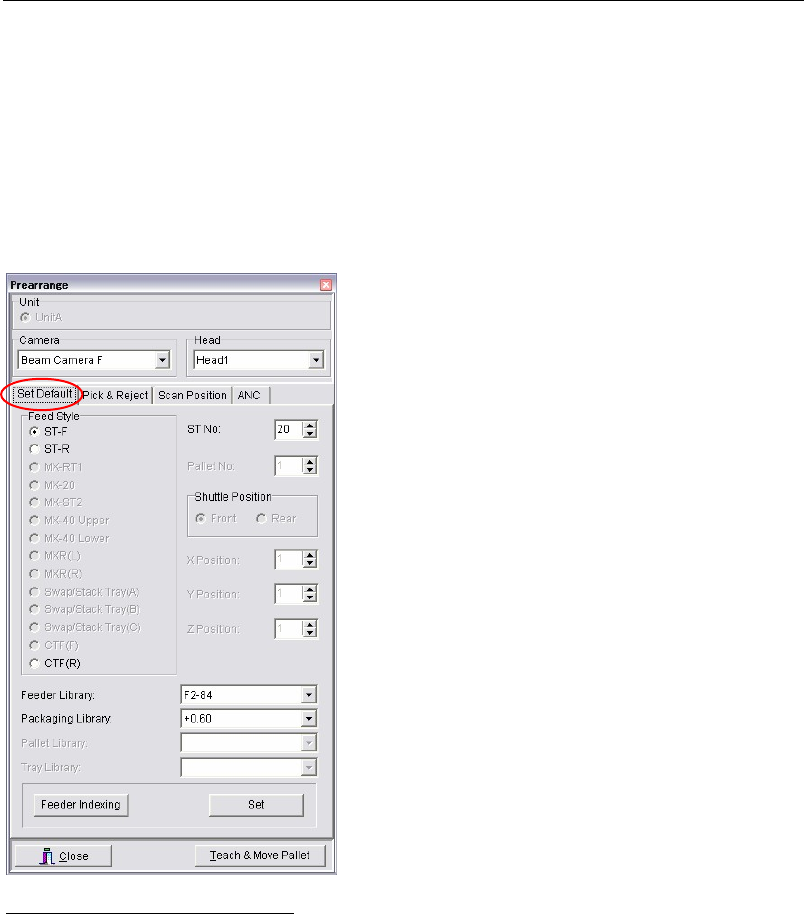
5-1-2-3 Prearrange
Prearrange allows a specified component to be picked up by a specified nozzle. The Prearrange
window can be accessed from the Image Library edit screen.
Window:
Unit: On the M7, select a Unit to be used.
Camera: Select a camera to process the specified component. The camera
selected in the Image Library edit window appears.
Head: Select a head to process the specified component.
Teach & Move Pallet: You can access the Teach dialog box.
1
If the nozzles in the heads are more than the ANC can accommodate, the operation results in an error. Remove
nozzles from the ANC as necessary and redo the operation.
■ Set Default tab
Specify pickup position of the component used for
ADA or ima
g
e test. Under [Feed St
y
le], select a feed
style. Depending on your choice, unnecessary
settin
g
s are dimmed. Enter all the active settin
g
s and
click <Set> button. Coordinate data will be entered
to [Pickup Coordinates] and [Reject Coordinates] in
[Pick & Reject] tab.
If you specify “Not Use” to library data setting
fields, [Pickup Coordinates] cannot reflect the offset
settings of the feeder/pallet library, nor [Reject
Coordinates] cannot be entered.
In using a tray component, be sure to specify tray
library data for [Tray Library], since [X Position] and
[Y Position] settings won’ be effective without the
component pitch setting of the tray library data.
<Feeder Indexing> button is enabled only when
<ST-F> or <ST-R> button is selected. Clicking
<Feeder Index> button allows the feeder to perform
indexing motion.
Chapter 5 Libraries
5-25
ANC tab
Refer to 9. Running a Job>ANC Initial Setting.
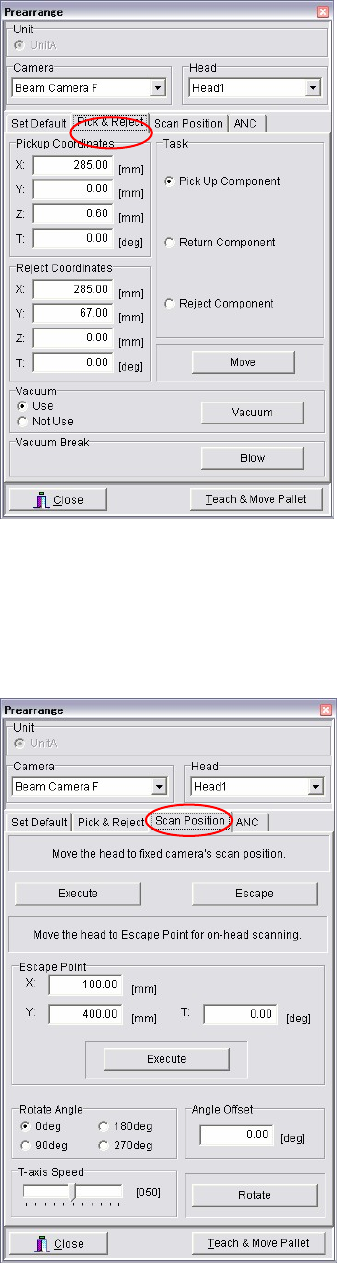
■ Pick & Reject tab
When the cursor is at a setting field of [Pickup
Coordinates] or [Reject Coordinates], the Teach
dialog box can be opened by right-clicking the
mouse. By using the Teach dialog box, you can
adjust the coordinates or move the tray pallet.
To pick up a component, select [Task], <Pick Up
Component>, <Execute>. After the pickup, the head
moves to the Head Escape coordinates.
After performing ADA or image test, a tray
component can be returned to the tray by selecting
<Return Component>. Also, a component can be
re
j
ected to the re
j
ect coordinates b
y
selectin
g
<Re
j
ect
Component>.
You can also manually attach the component to the
nozzle. The specified head starts vacuuming by
selecting [Vacuum], <Use>, <Execute>. Attach the
component in the direction of the package state.
To remove the component manuall
y
, move the head
to the machine front and place your hand below the
head. Then select [Vacuum], <Not Use>, <Execute>
to stop the vacuum and receive the component. If
the component keeps stuck to the nozzle, select
[Vacuum Break], <Use>, <Execute>.
■ Scan Position tab
[Move the head to fixed camera’s scan position.] is
available only when a fixed camera is specified.
Click <Execute> button and the component-loaded
head moves down for 5mm. Then the head assembl
y
travels to the scan position over the fixed camera. In
this state, select the VCS Control dialog box and
click <ADA> or <Image Test> button. Clicking
<Escape> button enables the head to move up to its
XY movement height.
When the scan camera is specified, you can specify
the head position where ADA or image test is
performed on-head. Enter coordinates of the head
position to [Escape Point] with teach entry
(right-click the mouse). Manual entry from the
keyboard is also available.
To rotate the component, select a rotation angle
under [Rotate Angle] and choose <Rotate> button.
To rotate by different angle from the suggested
options, enter offset angle to [Degree Offset], which
is added to the specified an
g
le for obtainin
g
desired
angle.
To adjust the T-axis speed, before executin
g
rotation,
specify per cent of the maximum speed (=100%) by
dragging the slider of [T-axis Speed].
* The function [Move the head to Escape Point for
on-head scanning.]does not work for now.