00198719-01_UM_X-Serie-S_PL.pdf - 第141页
Instrukcja eksploatac ji SIPLACE serii X S 3 Dane techniczne i zespo ł y Od wersji oprogramowania 713.0 Wydanie 11/2019 3.6 System portali 141 3.6.6 Budowa osi Y 3 Rys. 3.6 - 6 Budowa osi Y (przyk ł ad SIPLACE X2 S / X3 …
3 Dane techniczne i zespoły Instrukcja eksploatacji SIPLACE serii X S
3.6 System portali Od wersji oprogramowania 713.0 Wydanie 11/2019
140
3.6.5 Budowa osi X
3
Rys. 3.6 - 5 Budowa osi X - widok uchwytu głowicy
(1) Zamocowanie głowicy z silnikiem liniowym X (część pierwotna)
(2) Silnik liniowy Y ze stałą podporą (element pierwotny)
(3) System prowadnic z magnesem trwałym (część wtórna silnika liniowego osi X)
(4) Bufor położenia krańcowego (cztery sztuki)
(5) Wysięgnik portalu
(6) Uchwyt płyt głowicy
(7) System pomiaru długości
(4)
(3)
(1)
(5)
(2)
(6)
(4)
(7)
Instrukcja eksploatacji SIPLACE serii X S 3 Dane techniczne i zespoły
Od wersji oprogramowania 713.0 Wydanie 11/2019 3.6 System portali
141
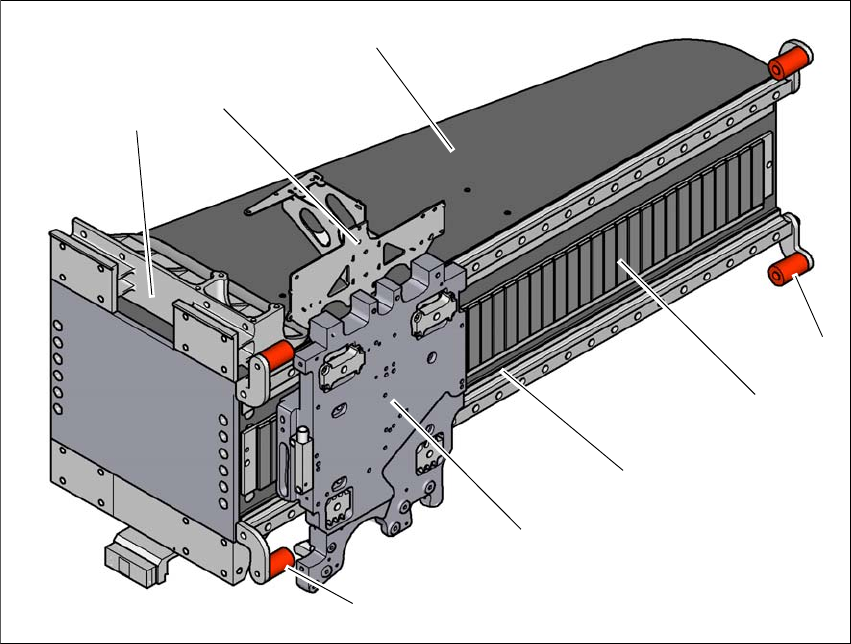
3.6.6 Budowa osi Y
3
Rys. 3.6 - 6 Budowa osi Y (przykład SIPLACE X2 S / X3 S / X4 S)
Oś Y składa się z następujących głównych zespołów:
(1) Silniki liniowe Y (część pierwotna) w osi X z łożyskiem stałym i przesuwnym
(2) Magnes stały (część wtórna silnika liniowego Y)
(3) Liniowy układ pomiarowy położenia
(4) System prowadnic
(1)
(4)
(2)
(3)
(4)
3 Dane techniczne i zespoły Instrukcja eksploatacji SIPLACE serii X S
3.7 Układ transportowy POD Od wersji oprogramowania 713.0 Wydanie 11/2019
142
3.7 Układ transportowy POD
3.7.1 Opis
Transportery POD wykonane są jako komponenty pięcioczłonowe, z taśmą podającą, obszarem
montażu 1, taśmą pośrednią, obszarem montażu 2 i taśmą wylotową. Wszystkie trzy obszary -
transporter podający, pośredni i wylotowy - służą jako strefy buforowe dla płytek drukowanych.
Taśmy transporterów są napędzane bezszczotkowymi silnikami prądu stałego. Transport płytek
drukowanych jest nadzorowany i sterowany fotokomórkami. Gdy płytka drukowana dojdzie do
sekcji uzbrajania i minie zaporę świetlną, jest wyhamowywana. Laserowa zapora świetlna reje-
struje pozycję płytki drukowanej. Gdy tylko płytka drukowana osiągnie pozycję zadaną, taśma
transportera jest zatrzymywana i płytka drukowana zaciskana od spodu.
Odległość między górną powierzchnią p
łytki drukowanej i głowicą montażową pozostaje niezmie-
niona dla każdej płytki drukowanej i nie zależy od jej grubości. Odpowiednio także prędkość
uzbrajania nie zależy od grubości płytek. Ponadto możliwe jest zoptymalizowanie centrowania
znaczników płytek drukowanych. Dzięki stałej odległości między powierzchnią płytki drukowanej
i kamerą, ogniskowa kamery jest zawsze dokładnie ustawiona na powierzchnię płytki drukowanej.
Kontury znaczników płytki drukowanej są optymalnie odwzorowane na układzie CCD kamery do
płytek drukowanych.
Szerokość transportera płytek drukowanych jest ustawiana i monitorowana elektronicznie przez
zintegrowany obwód regulacji. Może być wybierana wywołaniem programowym. W tym celu elek-
troniczny układ regulacji włącza silnik napędowy tak długo, aż zostanie osiągnięta żądana szero-
ko
ść. Regulacja szerokości jest więc niezależna od innych komponentów maszyny.
W automacie można wybrać taką wysokość przenośnika, aby można go było zintegrować z liniami
o wysokości przenośników 900, 930 lub 950 mm. Standardowa wysokość wynosi 930 mm.
Komunikację pomiędzy przenośnikami płytek drukowanych poszczególnych automatów monta-
żowych zapewnia The Hermes Standard lub interfejs SMEMA.