00198719-01_UM_X-Serie-S_PL.pdf - 第21页
Instrukcja eksploatacji SIPLACE serii X S 1 Wprowadzenie Od wersji oprogramowania 713.0 Wydanie 11/2019 1.2 Opis automatu monta ż owego 21 1.2.2 SIPLACE X4 S 1 Rys. 1.2 - 2 Automat monta ż owy SIPLACE X4 S Automat monta …
1 Wprowadzenie Instrukcja eksploatacji SIPLACE serii X S
1.2 Opis automatu montażowego Od wersji oprogramowania 713.0 Wydanie 11/2019
20
Do przetwarzania podzespołów może być użyty jeden z trzech wariantów uzbrajania:
– metoda Collect&Place,
– metoda Pick&Place oraz
– kombinacja metod Collect&Place i Pick&Place (tryb mieszany).
Automat montażowy SIPLACE X4i S posiada cztery portale. Oba portale w obszarze montażu 1
i oba portale w obszarze montażu 2 skierowane są do wewnątrz.
Głowice montażowe można niezależnie od siebie pozycjonować w kierunku X i Y w sposób szybki
i precyzyjny za pomocą silników liniowych.
Automat montażowy SIPLACE X4i S posiada dwa obszary montażu, jeden układ transportu po-
jedynczego albo jeden układ transportu podwójnego. Przy układzie transportu podwójnego
można jednocześnie uzbrajać dwie płytki drukowane.
Do przygotowania podzespołów dostępne są cztery stanowiska, które za pomocą wózka na po-
dzespoły mogą zostać uzbrojone na maks. 40 śladach. Na stanowiskach 2/3 lub 1/4 można skon-
figurować pozycje stołu w obszarze montażu w pozycji wewnętrznej i zewnętrznej.
1.2.1.1 Przegląd konfiguracji głowic montażowych
1
CPP_H = SIPLACE Multistar CPP w wysokim położeniu montażowym
CPP_L = SIPLACE Multistar CPP w niskim położeniu montażowym
Strefa uzbrajania 1 Strefa uzbrajania 2
C&P20 P / C&P20 P C&P20 P / C&P20 P
C&P20 P / C&P20 P CPP_L/CPP_L
C&P20 P / C&P20 P TH / TH
C&P20 P / C&P20 P CPP_H/TH
C&P20 P2 / C&P20 P2 C&P20 P2/C&P20 P2
C&P20 P2 / C&P20 P2 CPP_L/CPP_L
C&P20 P2 / C&P20 P2 TH / TH
C&P20 P2 / C&P20 P2 CPP_H/TH
CPP_L/CPP_L CPP_L/CPP_L
CPP_L/CPP_L CPP_H/TH
CPP_L/CPP_L TH / TH
Instrukcja eksploatacji SIPLACE serii X S 1 Wprowadzenie
Od wersji oprogramowania 713.0 Wydanie 11/2019 1.2 Opis automatu montażowego
21
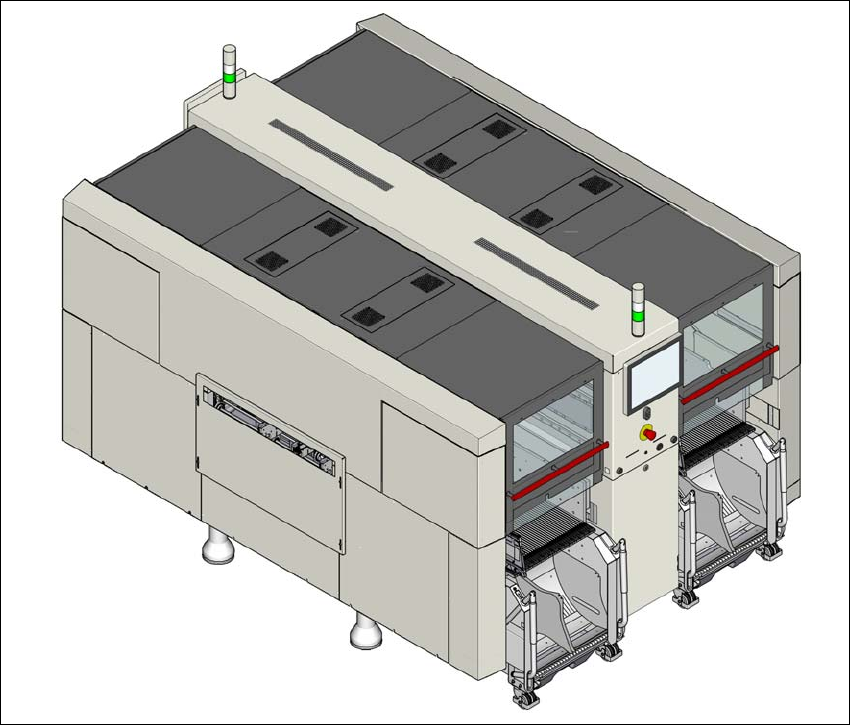
1.2.2 SIPLACE X4 S
1
Rys. 1.2 - 2 Automat montażowy SIPLACE X4 S
Automat montażowy SIPLACE X4 S wyróżnia się
– najwyższą precyzją,
– inteligentną optymalizacją wydajności,
– inteligentnymi strategiami zbrojenia,
–wydajnością montażową sięgająca do etapu technologicznego High-End.
Do przetwarzania podzespołów może być użyty jeden z trzech wariantów uzbrajania:
– metoda Collect&Place,
– metoda Pick&Place oraz
– kombinacja metod Collect&Place i Pick&Place (tryb mieszany).
Automat montażowy SIPLACE X4 S posiada cztery portale. Oba portale w obszarze montażu 1
skierowane są do stanowiska 4. Oba portale w obszarze montażu 2 skierowane są do stanowiska
2.
1 Wprowadzenie Instrukcja eksploatacji SIPLACE serii X S
1.2 Opis automatu montażowego Od wersji oprogramowania 713.0 Wydanie 11/2019
22
Głowice montażowe można niezależnie od siebie pozycjonować w kierunku X i Y w sposób szybki
i precyzyjny za pomocą silników liniowych.
Automat montażowy SIPLACE X4 S posiada dwa obszary montażu, jeden układ transportu poje-
dynczego albo jeden układ transportu podwójnego. Przy układzie transportu podwójnego można
jednocześnie uzbrajać dwie płytki drukowane.
Do przygotowania podzespołów dostępne są cztery stanowiska, które za pomocą wózka na po-
dzespoły mogą zostać uzbrojone na maks. 40 śladach.
1.2.2.1 Przegląd konfiguracji głowic montażowych
1
CPP_H = SIPLACE Multistar CPP w wysokim położeniu montażowym
CPP_L = SIPLACE Multistar CPP w niskim położeniu montażowym
Strefa uzbrajania 1 Strefa uzbrajania 2
C&P20 P/ C&P 20 P C&P20 P/ C&P 20 P
C&P20 P / C&P 20 P CPP_L / CPP_L
C&P20 P / C&P 20 P CPP_H / CPP_H
C&P20 / C&P 20 P2 C&P20 P2 / C&P 20 P2
C&P20 / C&P 20 P2 CPP_L / CPP_L
C&P20 / C&P 20 P2 CPP_H / CPP_H
CPP_L / CPP_L CPP_L / CPP_L
CPP_L / CPP_L CPP_H / CPP_H
CPP_H / CPP_H CPP_H / CPP_H
C&P20 P / C&P 20 P CPP_H / TH
C&P20 P2 / C&P 20 P2 CPP_H / TH
CPP_L / CPP_L CPP_H / TH
CPP_H / CPP_H CPP_H / TH
C&P20 P / C&P 20 P TH / TH
C&P20 P2 / C&P 20 P2 TH / TH
CPP_L / CPP_L TH / TH
CPP_H / CPP_H TH / TH
CPP_H / TH TH / TH
TH / TH TH / TH