00196511-02_UM_X-Serie_SR705_RU.pdf - 第130页
Техническ ие данные автомата Руководство по эксплуатации SIPLACE серия X Монтажная головка ПО - версия SR.70x.xx и выше Издание 01/2011 130 встроенной камерой для ко мп оне нт о в . С кр упными компонента ми до 50 x 40 м…
Руководство по эксплуатации SIPLACE серия X Технические данные автомата
ПО-версия SR.70x.xx и выше Издание 01/2011 Монтажная головка
129
3
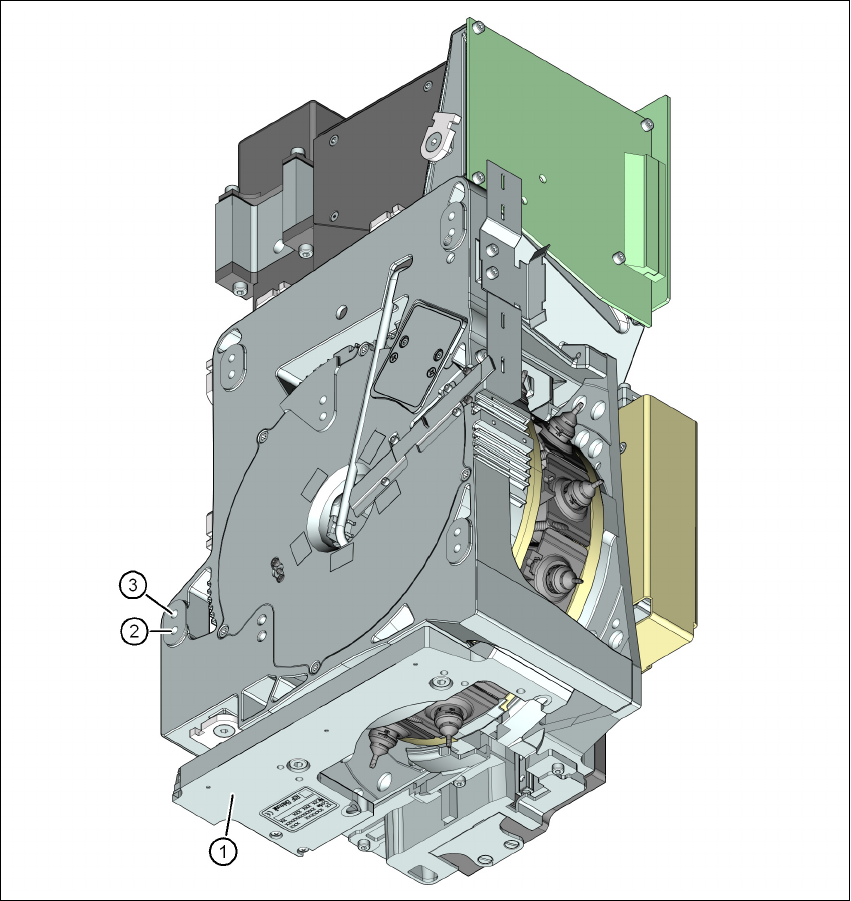
Pис. 3.5 - 5 SIPLACE MultiStar - вид сзади, функциональные узлы часть 3
(1) Датчик компонентов
(2) Монтажное положение для высоты компонента до 11,5 мм
(3) Монтажное положение для высоты компонента до 6 мм
3.5.2.1 Описание
Головка MultiStar соединяет в себе два противоположных качества: высокую монтажную
производительность и большую гибкость. С малыми компонентами до 27 x 27 мм² головка
MultiStar работает по принципу Collect&Place, иными словами, с высокой монтажной произ-
водительностью. Кроме этого, выполняется оптическое центрирование компонентов со
Технические данные автомата Руководство по эксплуатации SIPLACE серия X
Монтажная головка ПО-версия SR.70x.xx и выше Издание 01/2011
130
встроенной камерой для компонентов. С крупными компонентами до 50 x 40 мм² монтажная
головка работает по принципу Pick&Place, при котором выполняется оптическое центриро-
вание компонентов со стационарной камерой для компонентов.
Своему названию головка MultiStar обязана сочетанию двух принципов монтажа C&P и P&P.
Мы ненадолго назовем ее головкой CPP.
12 сегментов головки CPP образуют звезду. Моментный двигатель
с высоким крутящим мо-
ментом вращает звезду вокруг горизонтальной оси, оси звезды.
Каждый сегмент оснащен собственным приводом DP для вращения присоса. Теперь при-
сосы занимают правильное положение не только на единственной головной станции. Они
могут в любой момент и независимо друг от друга повернуться в требуемое монтажное по-
ложение.
Каждый сегмент
оснащен собственным вакуум-генератором. Это позволило значительно
сократить время переключения между нагнетанием вакуума и выдуванием воздуха. Кроме
этого, для каждого отдельного присоса в контуре удержания может быть проведена вакуум-
ная проверка.
Привод оси Z сегментов оснащен линейным электродвигателем с линейной системой из-
мерения перемещения и поэтому является предельно точным. В положении забора
/монта-
жа привод оси Z перемещает вниз или вверх по вертикали.
Цифровая камера для компонентов установлена на монтажной головке, как на всех голо-
вках SIPLACE Collect&Place. Отказ от дополнительных перемещений для оптического цен-
трирования компонентов позволил значительно увеличить скорость обработки.
Датчик компонентов на нижней стороне монтажной головки отслеживает перемещение
компонентов в положении забора/
монтажа. Каждое перемещение по оси Z фиксируется
датчиком на наконечнике присоса, что позволяет определить, не произошло ли сцепления
компонента с присосом и на какой высоте находится компонент.
3.5.2.2 Монтажные положения головки SIPLACE MultiStar
Головка CPP может быть установлена в двух различных положениях на держателе головки:
– Головка MultiStar в верхнем монтажном положении
В этом положении происходит обработка компонентов, имеющих размеры 50 x 40 мм²
и высоту 11,5 мм. 3
– Головка MultiStar в нижнем монтажном положении
В этом положении головка CPP выполняет монтаж компонентов размером до 27 x
27 мм² и высотой до 6 мм по принципу Collect&Place. 3
При выборе монтажного положения соблюдайте следующие правила:
→Высота монтажных головок в одной зоне монтажа должна быть одинаковой.
→ Всегда выполняйте установку головки CPP в верхнем монтажном положении, если она
соединена со следующими блоками:
– со стационарной камерой для компонентов;
– с механизмом смены лотков;
– с головкой TwinStar.
Руководство по эксплуатации SIPLACE серия X Технические данные автомата
ПО-версия SR.70x.xx и выше Издание 01/2011 Монтажная головка
131
3.5.2.3 Классификация подвергаемого обработке спектра компонентов
3
3.5.2.4 Монтажные режимы головки MultiStar
В зависимости от класса компонентов головка CPP может применяться в различных мон-
тажных режимах. Для процесса оптимизации лучше всех подходит монтажный режим с ми-
нимальной длительностью шага. В таблице далее приведена взаимосвязь между классом
компонента и монтажным режимом.
Табл. 3.5 - 2 Взаимосвязь между классом компонентов и монтажными режимами
3
3
Класс
компонентов
Размеры
компонентов
Монтажное
положение
a
головки CPP
Высота
компонента
Тип камеры для
компонентов
Малый
компонент
K_BE
01005
b
-
27 x 27 мм²
наверху до 8,5 мм
Камера для
головки, тип 30
внизу до 6 мм
01005
b
-
16 x 16 мм²
внизу до 6 мм
Камера для
головки, тип 38
Cредний
компонент,
тип M_BE_1
< 27 x 27 мм²
наверху
между
8,5 и 11,5 мм
Стационарная
камера для
компонентов,
тип 33
(см. раздел 6.7.1
,
страница 406
)
внизу невозможно
Cредний
компонент,
тип M_BE_2
между
27 x 27 мм² и
32 x 32 мм²
наверху 11,5 мм
внизу невозможно
Крупный
компонент
G_BE
между
32 x 32 мм² и
50 x 40 мм²
наверху до 11,5 мм Стационарная
камера для ком-
понентов,
тип 33
внизу невозможно
Табл. 3.5 - 1 Классификация подлежащего обработке спектра компонентов
a) См. рекомендации по высотам монтажных положений в разделе 3.5.2.2, на стр. 130.
b) 01005-BE: тип камеры 30; тип камеры 38 - рекомендованы для соответствия высоким требованиям
качества.
Монтажный режим Класс компонента
Малый компонент Средний компонент Большой компонент
Режим
Collect&Place
да нет нет
Cмешанный режим да да нет
Усиленный режим
Pick&Place
да да да
Cтандартный ре-
жим Pick&Place
нет нет да