OM-1460-001_w.pdf - 第60页
57 0709-001-(M845WC--A1005) X 軸 (3) モータ回路図 3 M -X12102 -X2102 W V L2 L3 CN2 PE PE U L1 3φAC200V AC200V CN10 -X2410 -X241 1 CN1 1 CN3 -X2103 10B 24B1R -U24 D C P L21 L1 1 :2 :1 :3 -M21E :3 :2 -X2100 :1 :1 -M21 -L136 -L236…
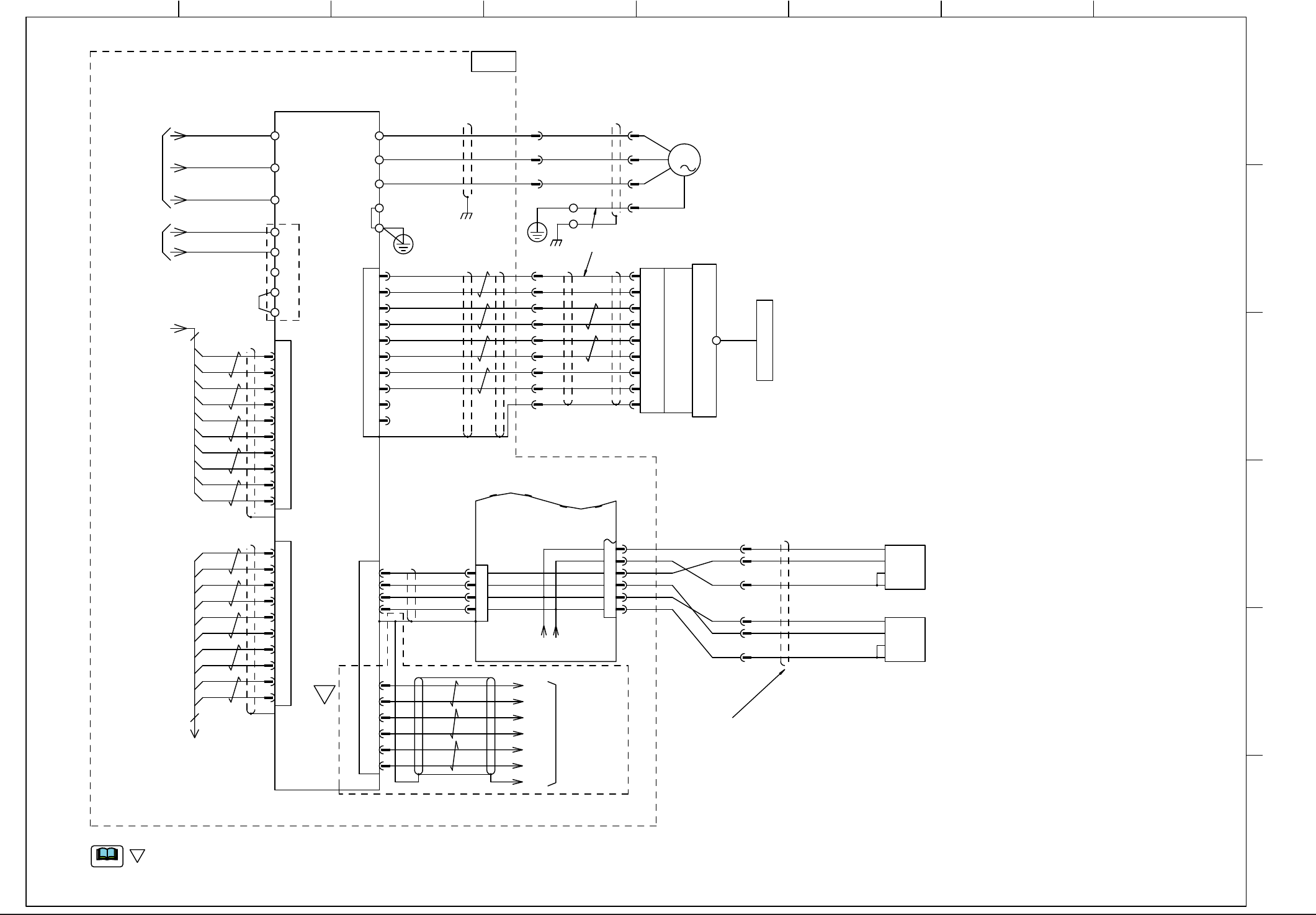
56
0709-001-(M845WC--A1004)
X 軸 (2) モータ回路図
3
M
-X12102
-X2102
W
V
L2
L3
CN2
PE
PE
UL1
3φAC200V
AC200V
CN10
-X2410
-X2411
CN11
CN3
-X2103
10B 24B1L
-U24
D
C
P
L21
L11
:2
:1
:3
-M21E
:3
:2
-X2100
:1
:1
-M21
-L136
-L236
-L336
-L121
-L221
:5
:6
:4
:1
:3
-X12103
:2
-U21
-U21
[B-/01/6H]
[B-/01/6H]
[C-/01/7H]
[C-/01/7H]
-X211A
CN1A
-X211B
CN1B
10
10
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
15
5
LG
LG
15
5
LG
LG
OUT
-
+
-B2101
L
OUT
-
+
-B2102
L
X-Axis
-M21
-A21
Servo Motor AMP
X
[R-/12/6A]
:SD
:15
:8
:10
:12
:4
:2
:5
:13
Yビーム(1)-X231Bから
1
17
7
1
1
20
6
16
4
14
19
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
ロボットケーブル
Xビーム(2)
Yビーム(2)-X221Aへ
BA
6
4
5
3
3
19
20
5
SG
LSP
LSN
COM
プレート
SD
6
4
3
5
1
2
ロボットケーブル
主回路電源
制御回路電源
6
15
8
10
12
4
2
5
13
変換器
/RQ
RQ
FG
5V/センサ
0V/センサ
0V
/SD
SD
5V
リニアエンコーダ
X軸 オーバーラン(+)
X軸 オーバーラン(-)
1
7
6
3
5
2
LAR
LA
LZR
LZ
LB
LBR
16
17
7
8
18
6
SIELD
X29401
認識CPU
カウンターボードへ
U94
1 2 3 4 5 6 7 8
A
B
C
D
E
F
S
ノート
S
マークは、
多機能ヘッドをblock2に搭載する場合、
サーボモータアンプ-A21-CN3と認識ボードU94-X19401間の配線を変更する。
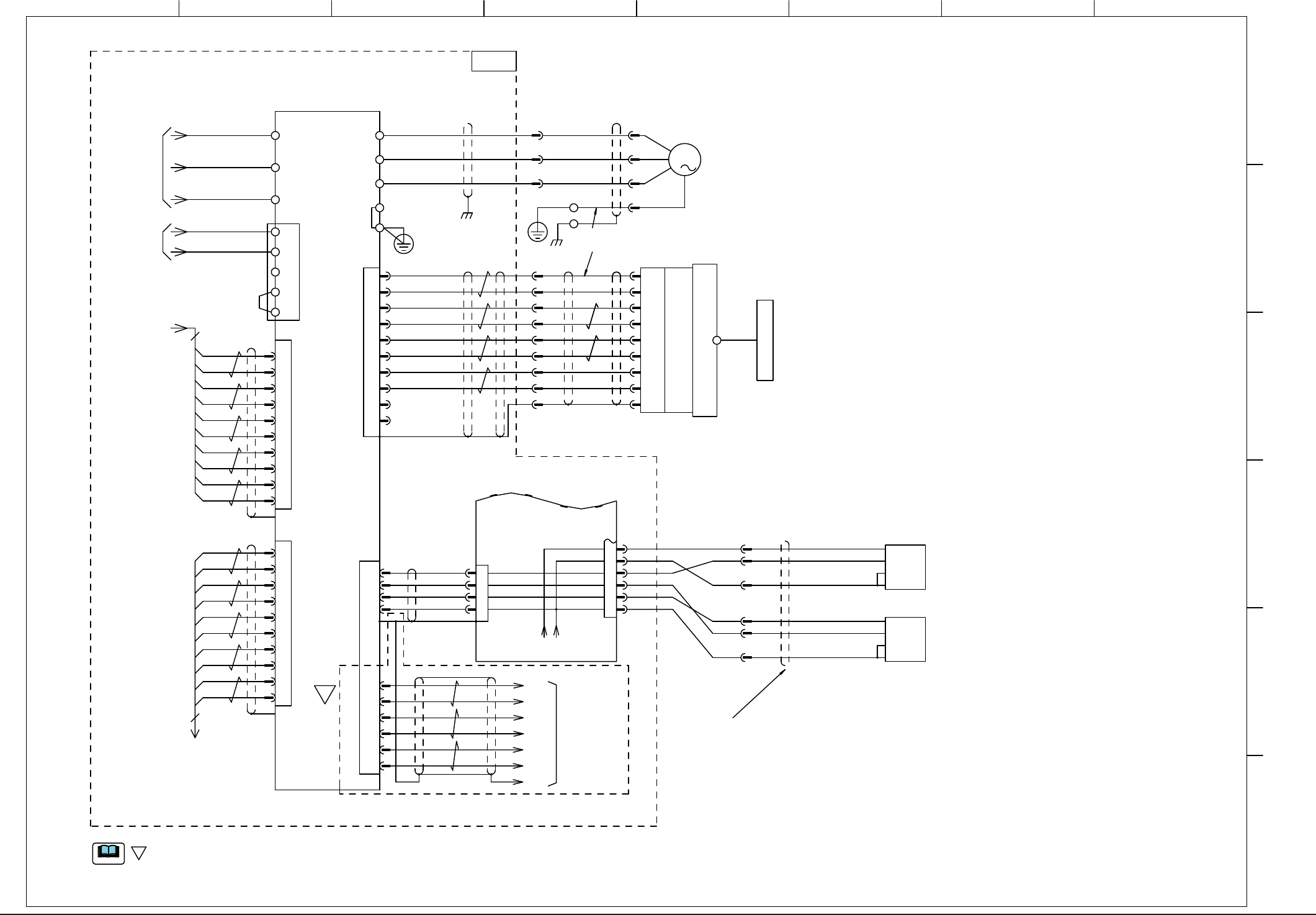
57
0709-001-(M845WC--A1005)
X 軸 (3) モータ回路図
3
M
-X12102
-X2102
W
V
L2
L3
CN2
PE
PE
UL1
3φAC200V
AC200V
CN10
-X2410
-X2411
CN11
CN3
-X2103
10B 24B1R
-U24
D
C
P
L21
L11
:2
:1
:3
-M21E
:3
:2
-X2100
:1
:1
-M21
-L136
-L236
-L336
-L121
-L221
:5
:6
:4
:1
:3
-X12103
:2
-U21
-U21
[B-/01/12D]
[B-/01/12D]
[C-/02/1B]
-X211A
CN1A
-X211B
CN1B
20
10
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
15
5
LG
LG
15
5
LG
LG
[F-/22/6A]
OUT
-
+
-B2101
L
OUT
-
+
-B2102
L
X-Axis
-M21
-A21
Servo Motor AMP
X
[R-/12/6A]
:SD
:15
:8
:10
:12
:4
:2
:5
:13
1
17
7
11
20
6
16
4
14
19
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
ロボットケーブル
Xビーム(3)
Yビーム(3)-X221Aへ
BC
6
4
5
3
3
19
20
5
SG
LSP
LSN
COM
プレート
SD
6
4
3
5
1
2
ロボットケーブル
主回路電源
制御回路電源
6
15
8
10
12
4
2
5
13
変換器
/RQ
RQ
FG
5V/センサ
0V/センサ
0V
/SD
SD
5V
リニアエンコーダ
CPU2-R
FD-U82(ID:0)
SSCNET
(-X8201)
X軸 オーバーラン(+)
X軸 オーバーラン(-)
1
7
6
3
5
2
LAR
LA
LZR
LZ
LB
LBR
16
17
7
8
18
6
SIELD
X39401
認識CPU
カウンターボードへ
U94
1 2 3 4 5 6 7 8
A
B
C
D
E
F
S
ノート
S
マークは、
多機能ヘッドをblock3に搭載する場合、
サーボモータアンプ-A21-CN3と認識ボードU94-X19401間の配線を変更する。
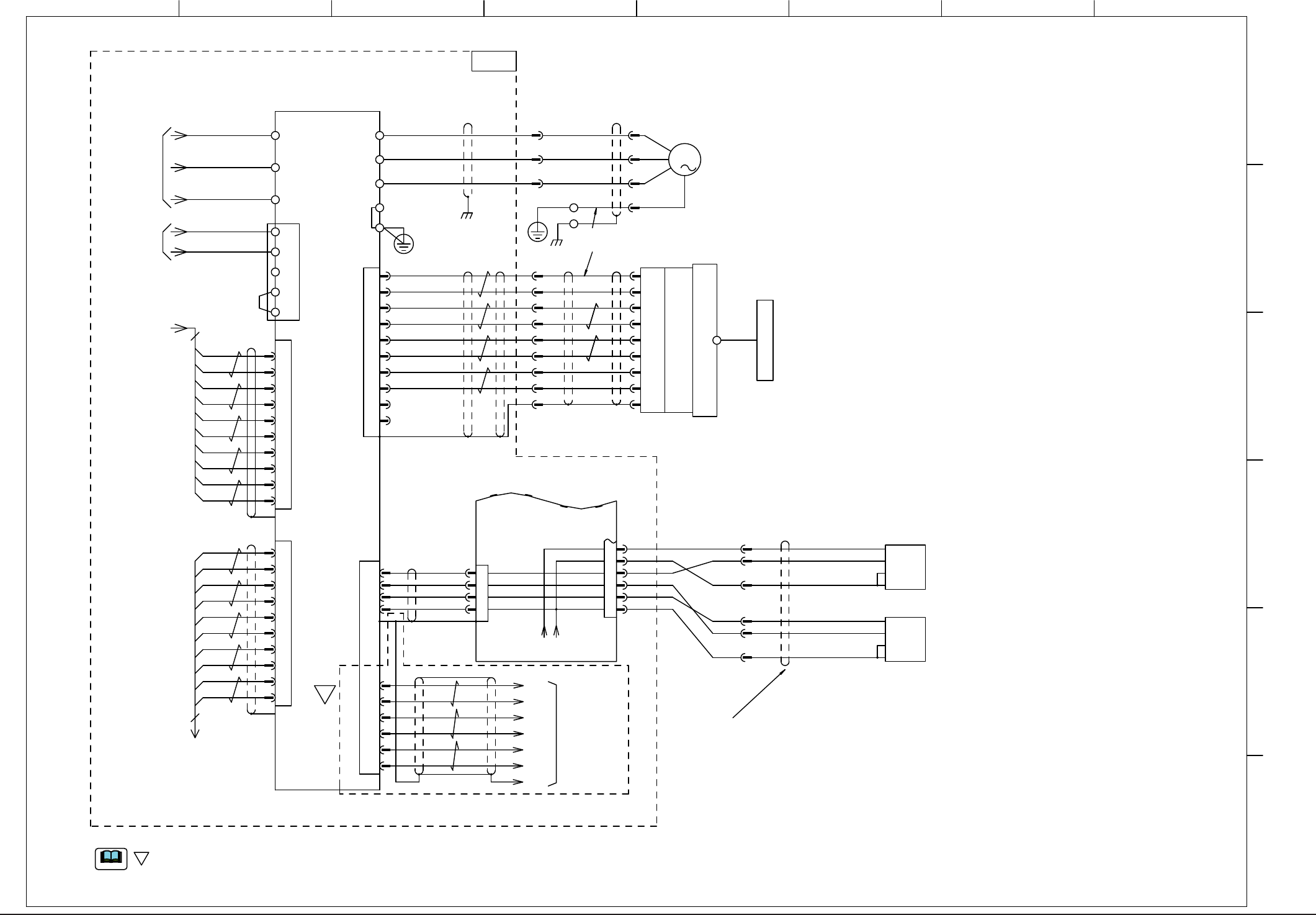
58
0709-001-(M845WC--A1006)
X 軸 (4) モータ回路図
3
M
-X12102
-X2102
W
V
L2
L3
CN2
PE
PE
UL1
3φAC200V
AC200V
CN10
-X2410
-X2411
CN11
CN3
-X2103
10B 24B1R
:2
-X12103
:3
:1
:4
:6
:5
-U24
D
C
P
L21
L11
:2
:1
:3
-M21E
:3
:2
-X2100
:1
:1
-M21
-L136
-L236
-L336
-L121
-L221
-U21
-U21
[B-/01/12G]
[B-/01/12G]
[C-/02/7H]
[C-/02/7H]
-X211A
CN1A
-X211B
CN1B
10
10
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
15
5
LG
LG
15
5
LG
LG
OUT
-
+
-B2101
L
OUT
-
+
-B2102
L
X-Axis
-M21
-A21
Servo Motor AMP
X
[R-/12/6A]
:SD
:15
:8
:10
:12
:4
:2
:5
:13
Yビーム(3)-X231Bから
1
17
7
1
1
20
6
16
4
14
19
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
ロボットケーブル
Xビーム(4)
Yビーム(4)-X221Aへ
BC
6
4
5
3
3
19
20
5
SG
LSP
LSN
COM
プレート
SD
6
4
3
5
1
2
ロボットケーブル
主回路電源
制御回路電源
6
15
8
10
12
4
2
5
13
変換器
/RQ
RQ
FG
5V/センサ
0V/センサ
0V
/SD
SD
5V
リニアエンコーダ
X軸 オーバーラン(+)
X軸 オーバーラン(-)
1
7
6
3
5
2
LAR
LA
LZR
LZ
LB
LBR
16
17
7
8
18
6
SIELD
X49401
認識CPU
カウンターボードへ
U94
1 2 3 4 5 6 7 8
A
B
C
D
E
F
S
ノート
S
マークは、
多機能ヘッドをblock4に搭載する場合、
サーボモータアンプ-A21-CN3と認識ボードU94-X19401間の配線を変更する。