CN_Nordson_EFD_EV_Series_Operating_Manual - 第52页
EV系列自动点胶系统 www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信 EFD 在全球范围内销售专业点胶系统并提供技术支持服务 52 设置输入/输出 设置输入/输出 如果已进行输入/输出连接,请按照如下步骤测试输入/输出连接。 注: 注:所有自动点胶系统都提供了8项标准输入和8项标准输出。您也可选择使用一个工具套件,扩展到8项输入和18项输 出。参阅第70页…
EV系列自动点胶系统
www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信EFD在全球范围内销售专业点胶系统并提供技术支持服务
51
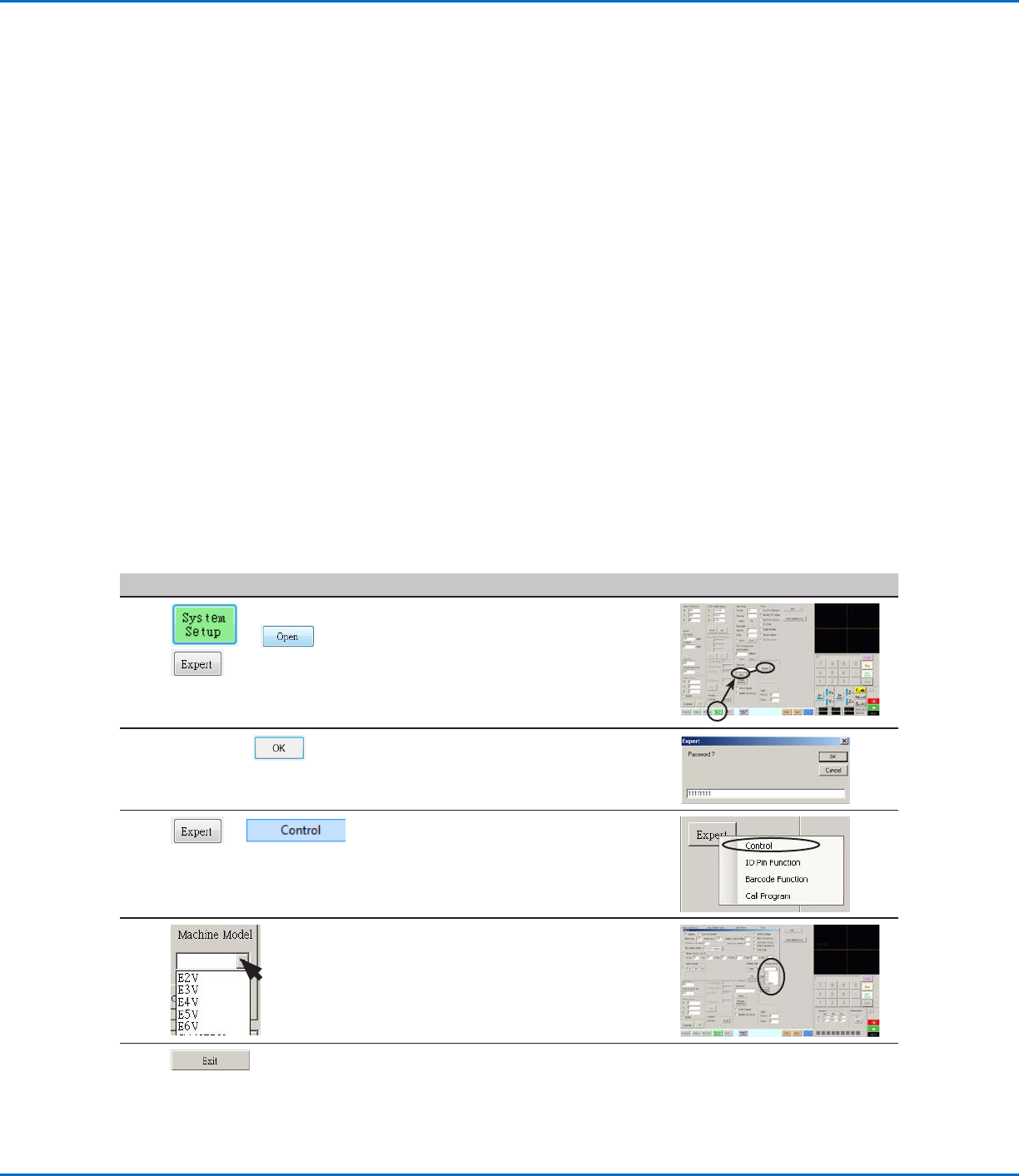
更改机械手型号选择更改机械手型号选择
必须选择正确的机械手型号才能让系统正常运行。 按照下面的程序,根据需要更改机械手型号选择。
## 点击点击 操作步骤操作步骤 基准图像基准图像
1
> > > >
· 单击“系统设置”>“打开”>“专
家”。
2
11111111 > 11111111 >
· 输入11111111,然后单击“确定”。
3
> >
· 单击“专家”,然后单击“控制”。
4
· 从“机器型号”下拉菜单中选择正确
的机械手型号。
5
· 单击“退出”以关闭然后重新打开
DispenseMotion软件以使更改生效。
系统对针头Z轴检测或针头XY轴调节的处理方式系统对针头Z轴检测或针头XY轴调节的处理方式
注:注:在具有可选针头探测器的系统上,“撞针 XY 调整”和“撞针Z检测”按钮都存在。在不带可选针头探测器的系统
上,只存在“撞针 XY 调整”按钮。
点击“针头Z轴检测”(NEEDLE Z DETECT)后,系统会执行以下操作:点击“针头Z轴检测”(NEEDLE Z DETECT)后,系统会执行以下操作:
· 将针头移动至“针头检测器”传感器上方,然后落下,直到与传感器相接触。
· 测量并比较最后一次测量与当前测量之间的差异。
· 确认针头至工件偏移值(Z轴工作高度)有无任何变化。
· 按照新的针头至工件偏移值(Z轴工作高度)重新校准当前打开程序中的所有点。
· 自动执行“针头XY轴调节”程序(如下所示)。
点击针头XY轴调节”(NEEDLE XY ADJUST)后,系统会执行以下操作:点击针头XY轴调节”(NEEDLE XY ADJUST)后,系统会执行以下操作:
· 移动针头至工件上预设位置。
· 进行单点点胶。
· 将摄像头移动至胶点的上方。
· 根据标记库中保存的标记图像对该点的校准情况进行比对。
· 摄像头至针头偏移发生任何改动,需进行确认(XY偏移)。
· 按照新的XY偏移值重新校准当前打开程序中的所有点。

EV系列自动点胶系统
www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信EFD在全球范围内销售专业点胶系统并提供技术支持服务
52
设置输入/输出设置输入/输出
如果已进行输入/输出连接,请按照如下步骤测试输入/输出连接。
注:注:所有自动点胶系统都提供了8项标准输入和8项标准输出。您也可选择使用一个工具套件,扩展到8项输入和18项输
出。参阅第70页上的“附件”。
前提条件前提条件
系统得到正确安装和设置。请参见第18页“安装”以及第38页“设置”。
输入/输出接线正确连接。关于接线图,请参见第75页“输入/输出端口”。
##
点击点击 操作步骤操作步骤
1
> >
· 点击“系统设置”(SYSTEM SETUP) > IO 。
2
点击想要开启(ON)或关闭(OFF)的输入/输出项,然后点击X,关闭窗口。
注:注:
· 输入闪烁为红色,表示输入已开启。
· 仅使用输入/输出1-8。剩余的输入/输出用于系统使用。
配置专用输入/输出配置专用输入/输出
输入输出引脚功能可提供一系列影响机械手操作的用户配置条件。请参见第114页“附录G - 输入/输出引脚功
能设置”。
EV系列自动点胶系统
www.nordsonefd.com/cn china@nordsonefd.com +86 (21) 3866 9006 诺信EFD在全球范围内销售专业点胶系统并提供技术支持服务
53
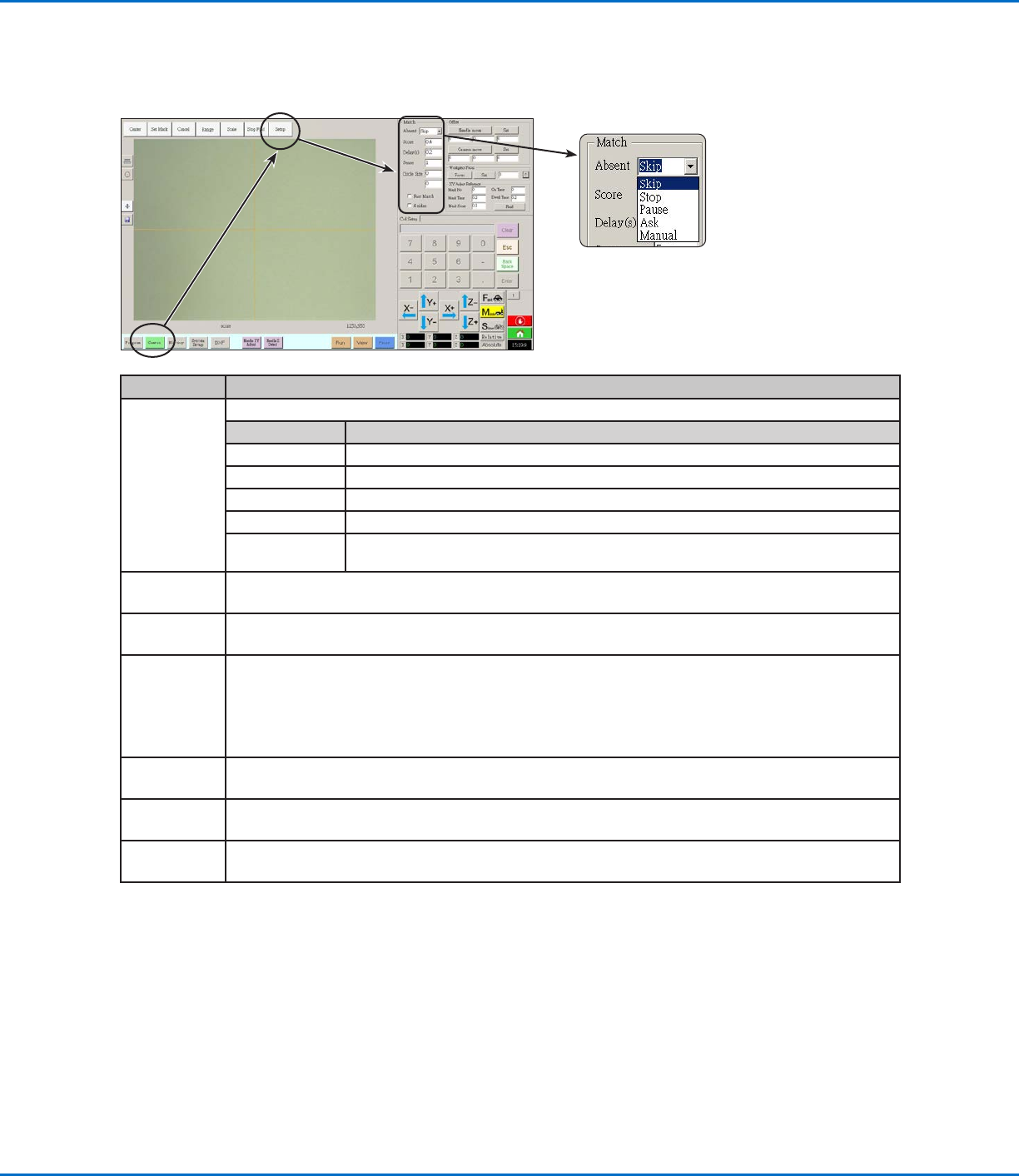
设置如何使系统查找标记(可选)设置如何使系统查找标记(可选)
使用“摄像头”>“设置”>“匹配”下面的字段调整系统在搜索标记时的运行方式。
项目项目 功能功能
Absent
(缺失)
指定系统无法识别标记时的响应方式。
参数参数 描述描述
Skip (跳过) 机械手跳到下一个程序地址。
Stop (停止) 机械手停止操作。
Pause (暂停) 机械手暂停操作。
Ask (询问) 系统询问您是否想要:再次查找、查找下一个、停止查找或使用手动模式。
Manual (手动) 系统会让您将摄像头移动至下一个标记,然后选择“暂停”,继续执行程序。这种情况
下,“暂停”意味着跳过没有找到标记这个问题,继续运行。
Score
(准确分值)
通过0.1 - 1范围内的一个值来反映摄像头查找到某一标记的准确度。值越高,匹配就越精确。值越低,匹配就越
不精确。
Delay(s)
(延迟)
设置系统在达到标记区域时查找一个标记的延迟时间(秒)。
Sense
(感应)
通过1 - 200范围内的一个值来反映摄像头同一个标记的像素相对齐的准确度。如果感应值较低,摄像头同标记进
行对齐的操作速度会减慢,因为为了获得较高准确度而需要不断重复检查标记的位置。如果感应值较高,摄像头
对齐速度会变快,但准确度下降。例如,感应值为1,意味着偏差不能超过1个像素。如果感应值为200,则偏差最
大可达200个像素。
注:要想让查找速度减慢但准确度提升,应输入较低的感应值和准确分值;要想加快查找速度但准确度下降,可
输入较高的感应值和准确分值。
Circle Size
(圆尺寸)
在“摄像头”屏幕上设置黄色和绿色圆圈的尺寸大小。值越高,圆就越大。
Fast Match
(快速匹配)
如果勾选此项,摄像头会更快速地查找标记,但准确度下降。
4 sides
(4面)
面设置摄像头搜寻标记的区域。如果未勾选此项,摄像头仅在指定范围内查找(在“范围”下设置)。如果勾选
了此项,摄像头会忽略范围设置,在整个屏幕进行搜索。这会增大找到该标记的概率,但会减慢速度。