00198164-04_UM_E-by-SIPLACE_DK.pdf - 第119页
Betjeningsvejledning E by SIPLACE 3 Tekniske data og konstruktio nsgrupper Fra softwareversion SC 712.1 Udgave 05/2019 DK 3.5 Bestykningshov ed 119 3.5.1.1 Beskrivelse SIPLACE CP14 arbejder efter Collect&Place-pr inc…
3 Tekniske data og konstruktionsgrupper Betjeningsvejledning E by SIPLACE
3.5 Bestykningshoved Fra softwareversion SC 712.1 Udgave 05/2019 DK
118
3
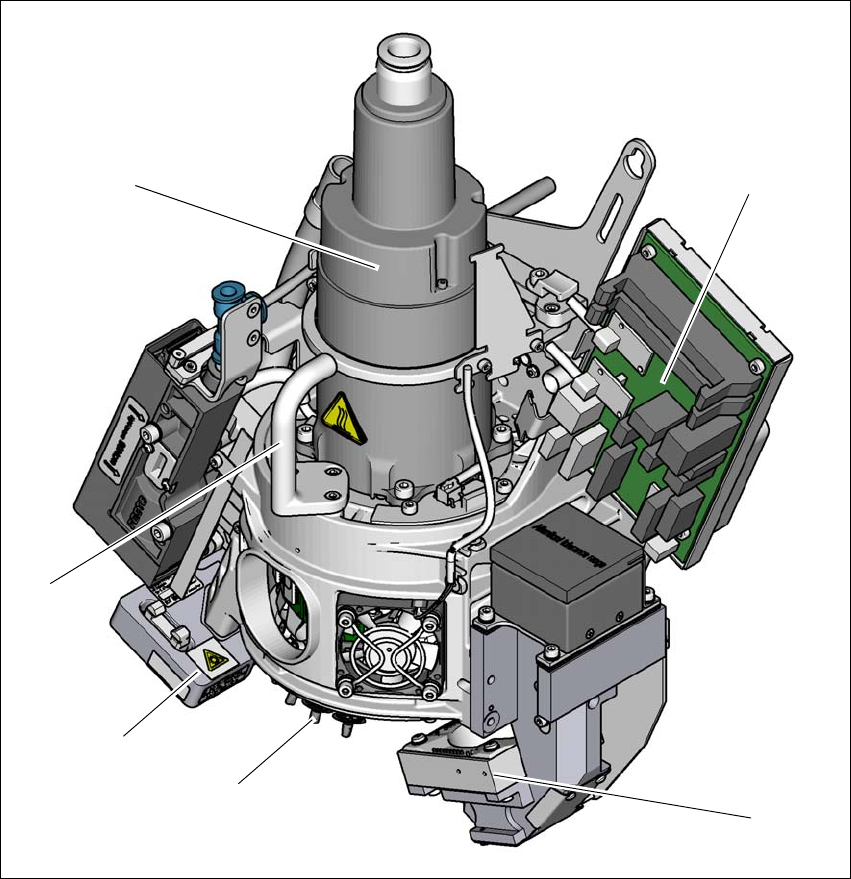
Fig. 3.5 - 2 SIPLACE CP14 - Funktionsgruppe del 2
(1) BE-kamera, Type 23 GigE
(2) Stjerne med 14 pipetter
(3) Komponentsensor
(4) Håndtag
(5) Stjernemotor
(6) Mellemfordeler-printplade
(1)
(2)
(3)
(4)
(5)
(6)

Betjeningsvejledning E by SIPLACE 3 Tekniske data og konstruktionsgrupper
Fra softwareversion SC 712.1 Udgave 05/2019 DK 3.5 Bestykningshoved
119
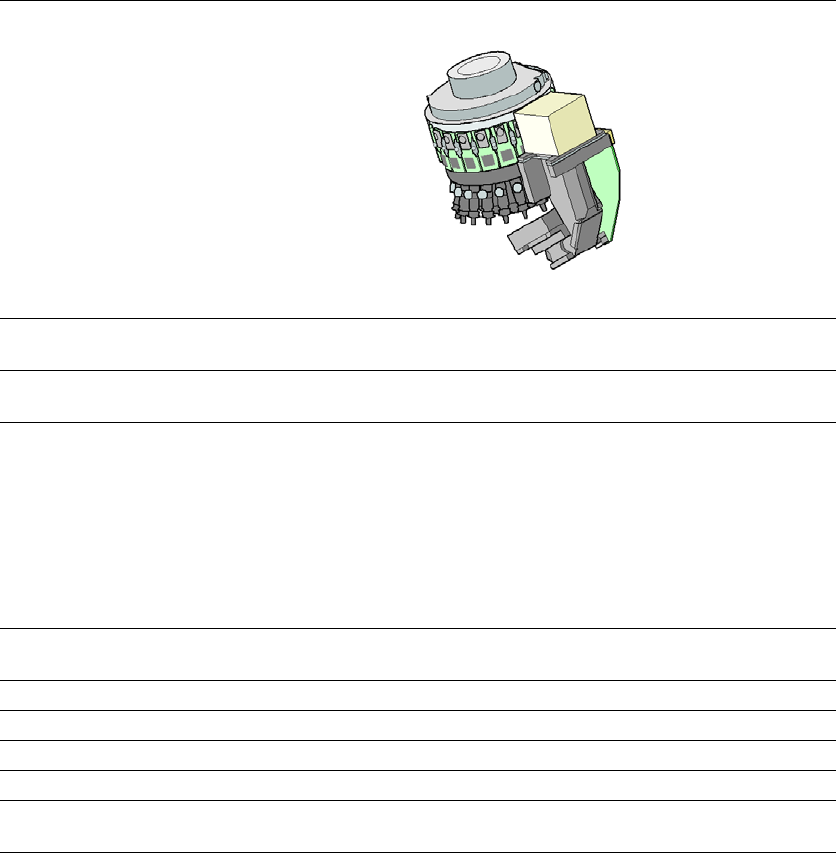
3.5.1.1 Beskrivelse
SIPLACE CP14 arbejder efter Collect&Place-princippet, dvs. inden for en cyklus hentes fjorten
komponenter af bestykningshovedet. Komponentsensoren kontrollerer på bestyknings- /hentepo
-
sitionen, om en komponent er blevet hentet af pipetten. På vej hen til bestykningspositionen cen
-
treres komponenterne rent optisk og drejes i den nødvendige bestykningsposition. Herefter
sættes de forsigtigt og positionsnøjagtigt fra på printpladen med blæseluft.
Med SIPLACE CP14 kan ydelsen for bestykningshoved og herved bestykningsautomaten øges
betydeligt. Den kompakte konstruktion af SIPLACE CP14 muliggør også meget korte cyklustider.
I denne forbindelse står stjerneaksen på skrå i forhold til printpladeniveauet. Denne geometri gør
det muligt at place segmenterne meget tæt.
BE-kamera er integreret i SIPLACE CP14-hovedet. Dette sparer ekstra køreveje til eksterne cen
-
treringskameraer. Desuden har hvert segment sit eget DP-drev til rotering af pipetten. Pipetterne
drejes derfor ikke mere i den rigtige position på en eneste hovedstation. De kan til enhver tid og
uafhængigt af hinanden drejes i deres bestykningsposition.
Hvert segment har sin egen vakuumgenerator. Omkoblingstiderne mellem vakuum og blæseluft
kan således forkortes betydeligt. Desuden kan en vakuumkontrol gennemføres i holdekredsen for
hver enkelt pipette.
Z-drevet for segmenterne er realiseret med en linearmotor med linear vejmålesystem og dermed
meget præcis. I hente-/bestykningspositionen kører Z-drevet segmenterne lodret op eller ned.
3.5.1.2 Sensor til komponent-udsmidningsbeholder
Artikel-nr, 03103405-xx Sensor for den BE-afkastbeholder
Sensoren til komponent-udsmidningsbeholderen overvåger, om fejlvarebeholderen sidder korrekt
i sin holder.
– Er fejlvarebeholderen ikke blevet sat korrekt i, kan automaten ikke startes.
– Springer fejlvarebeholderen ud af sin holder under bearbejdningsprocessen, stopper auto
-
maten med det samme for at undgå et hovedcrash.
Hver afkastbeholder overvåges af en sensor.
3.5.1.3 Drift med vakuumpumpe
Der benyttes en vakuumpumpe for SIPLACE CP14, for effektivt vakuum (se afsnit 3.5.4, side
129).
3 Tekniske data og konstruktionsgrupper Betjeningsvejledning E by SIPLACE
3.5 Bestykningshoved Fra softwareversion SC 712.1 Udgave 05/2019 DK
120
3.5.1.4 Tekniske data SIPLACE CP14
3
SIPLACE CP14
med BE-kamera Type 23
GigE
BE-spektrum
*a
*)a Vær opmærksom på, at det bestykbare komponent-spektrum også påvirkes af pad-geometrierne, de kun
-
despecifikke standarder og komponent-emballagetolerancerne.
01005 til 2220, Melf, SOT,
SOD
BE-specifikationer
maks. højde
min. benraster
min. benbredde
min. ball-raster
min. ball-diameter
min. dimensioner
maks. dimensioner
maks. vægt
4 mm
0,25 mm
0,1 mm
0,4 mm
0,2 mm
0,4 mm x 0,2 mm
6mm x 6 mm
0,25 g
Programmerbar
påsætningskraft
1,3 - 4,5 N
Pipettetyper 4xxx
X/Y-nøjagtighed
*b
*)b SIPLACE præcisionsværdien måles ved maskinens afleveringsprøve. De modsvarer betingelserne i
SIPLACE leverings- og ydelsesomfang.
± 41 µm / 3σ
Vinkelnøjagtighed ± 0,5° / 3σ
Belysningsniveauer 5
Indstillingsmuligheder for
belysningsniveauer
256
5