00192404-02.pdf - 第37页
Betriebsanleitung SIPLACE S-25 HM 1 Einleitung, technische Daten Softwareversion SR.502.xx Ausgabe 01/2001 DE 1.12 Baugruppe n ü bersicht - Portale 37 1.12.3 T echnische Daten der X-Achse 1 1.12.4 Aufbau de r Y -Achse Di…
1 Einleitung, technische Daten Betriebsanleitung SIPLACE S-25 HM
1.12 Baugruppenübersicht - Portale Softwareversion SR.502.xx Ausgabe 01/2001 DE
36
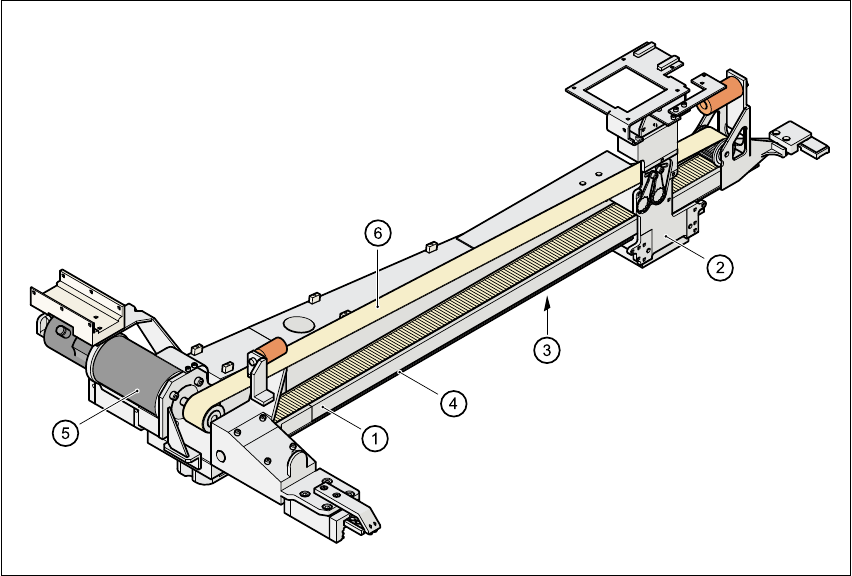
1.12.2 Aufbau der X-Achse
1
Abb. 1.12 - 2 Aufbau der X-Achse
Die X-Achse besteht im wesentlichen aus folgenden Hauptbaugruppen:
– Portalausleger (1)
– Kopfhalterung (2)
– X-Achsenmesssystem (3)
– X-Führungssystem (4)
– X-Drehstrom-Servomotor (5)
– Zahnriemen (6)
Die Kopfhalterung nimmt folgende Komponenten auf
– Unterportalkamera (LP-Kamera des LP-Visionmoduls)
– Kopfplatine
– Messkopf des Messsystems der X-Achse
– Collect&Place-Kopf
Betriebsanleitung SIPLACE S-25 HM 1 Einleitung, technische Daten
Softwareversion SR.502.xx Ausgabe 01/2001 DE 1.12 Baugruppenübersicht - Portale
37
1.12.3 Technische Daten der X-Achse
1
1.12.4 Aufbau der Y-Achse
Die Y-Achse besteht im wesentlichen aus folgenden Hauptbaugruppen:
– Y-Drehstrom-Servomotor
– Y-Zahnriemen
– Y-Führungssystem
– Y-Achsenmesssystem
Jede Y-Achse wird von einem Drehstrom-Servomotor angetrieben. Eine Anticrashschaltung
begrenzt die Verfahrwege der Portale gegeneinander.
1.12.5 Technische Daten der Y-Achse
1
Antrieb Drehstromservomotor/Zahnriemen
Max. Geschwindigkeit 2,5 m/sec.
Verfahrweg 620 mm
Wegmesssystem Linearer Metallmaßstab
Maßstabslänge 646 mm
Auflösung 2,5 µm
Antrieb Drehstrom-Servomotor / Zahnriemen
Max. Geschwindigkeit 2,5 m/sec.
Verfahrweg 910 mm
Wegmesssystem Lineare Metallmaßstäbe
Maßstabslänge 970 mm
Auflösung 2,5 µm
1 Einleitung, technische Daten Betriebsanleitung SIPLACE S-25 HM
1.13 Baugruppenübersicht - Bestückköpfe Softwareversion SR.502.xx Ausgabe 01/2001 DE
38
1.13 Baugruppenübersicht - Bestückköpfe
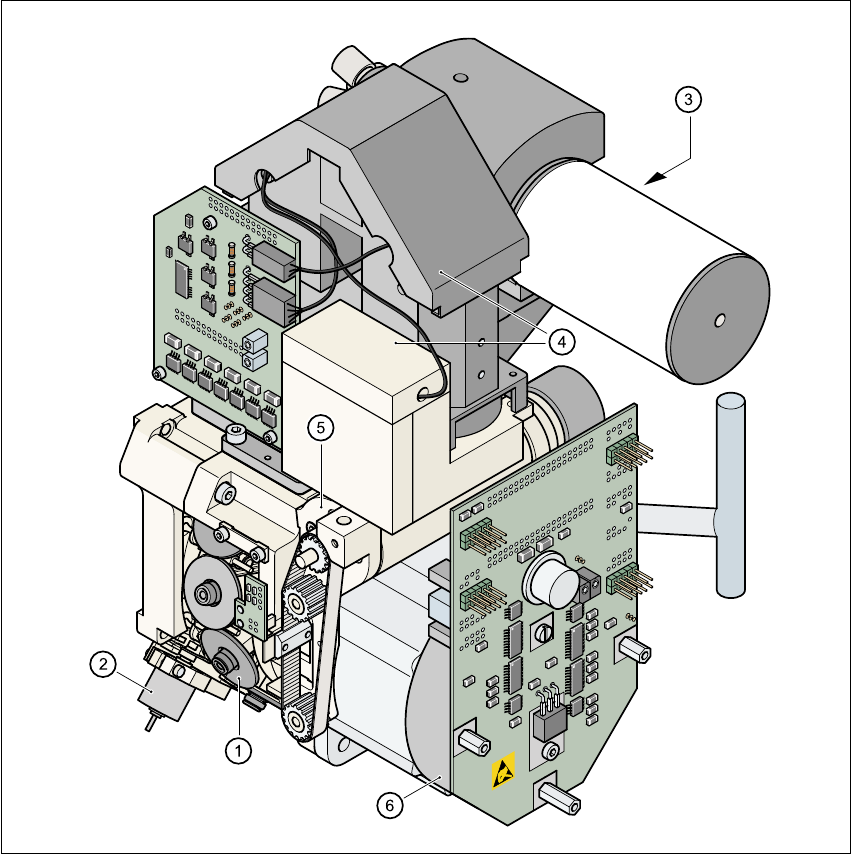
1.13.1 Aufbau des 12-Segment-Collect&Place-Kopfes / DLM1
1
Abb. 1.13 - 1 Aufbau des 12-Segment-Collect&Place-Kopfes / DLM1
Alle Bauelemente werden mit der gleichen Taktzeit bestückt. Bevor das Bauelement bestückt
wird, wird es mit dem Visionmodul optoelektronisch vermessen.
(1) Stern mit 12 Pinolen (2) Motor, Ventilstellantrieb "Abwurf"
(3) Drehstation (4) BE-Visionmodul
(5) Z-Achsantrieb (6) Sternmotor