Q170226E01 中文版.pdf - 第116页
rh5 服务手册 5.3X − Y表的 来源和超限检 查和调整 da3s ec − 83 − 8ko − a0 5.3 − 2 4 检查/调 整X − Y表极限分 配器 1. 通 过 主 控 面 板 选 择 “NCAXIS 移 动 CHECK”=“ NCAXIS JOG CHECK 。 输 入 到 X 和 的距离( 数值 − 轴 限 制 传 感 器 , 并 移 动 轴 , 以 确 保 传 感 器 相 应 亮起。 <m> 十 …
rh5
服务手册
5.3X−Y表的来源和超限检查和调整
5.3
−
1
3
da3sec−83−8ko−a0
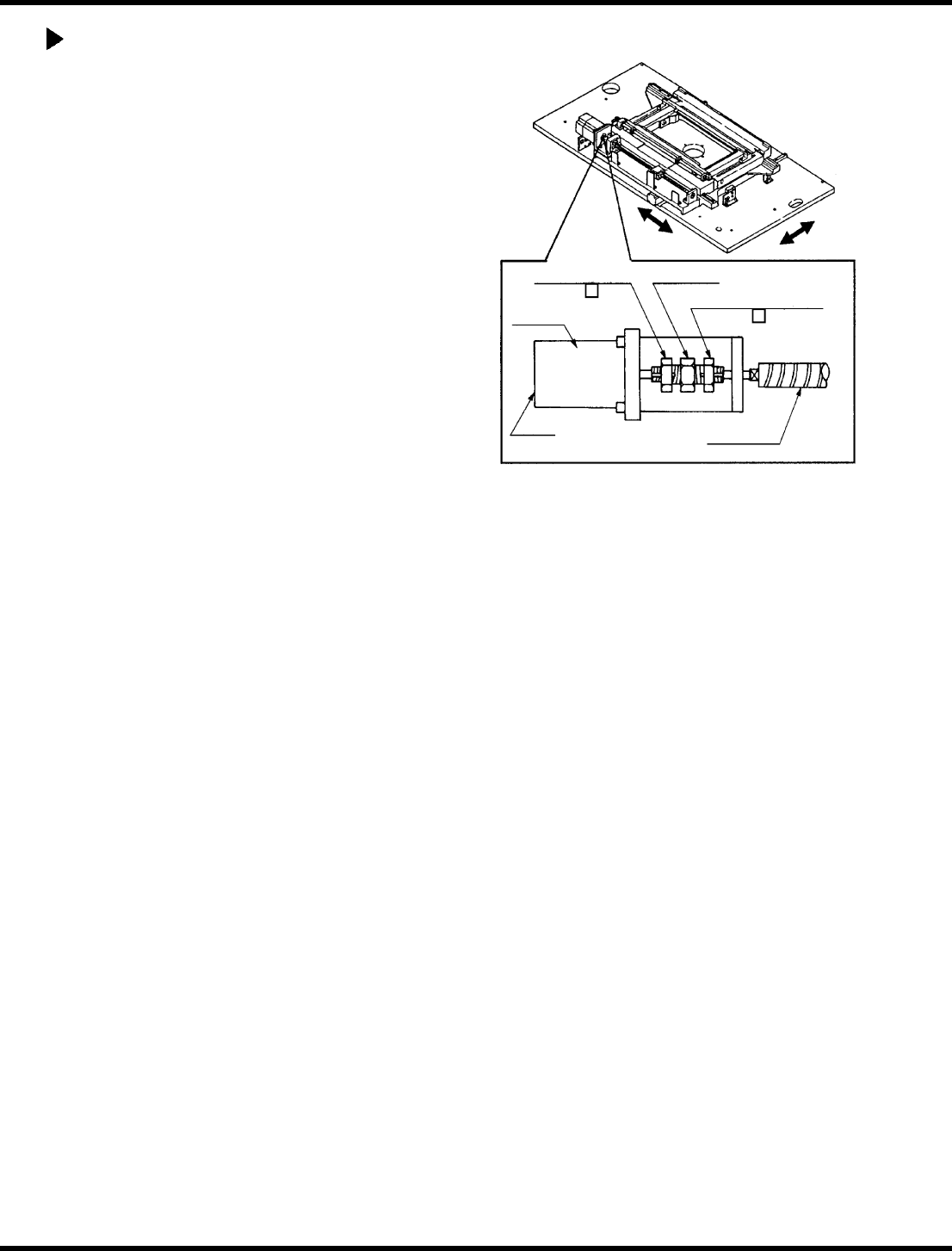
调整原点位置
1.
将X轴(Y轴)驱动器的CH4(速度环增益)从
200更改为100。
2.
关闭电源并将其打开。
3.
手动将X−Y表返回到其原点,并将其移动
到步骤4中在“检查原点位置”中创建的
数据位置’。
4.
断开N耦合。
5.
手动移动X−Y表,引导销通过转动手轮从
原点板中出来。
6.
将手轮返回原点,然后拧紧N个联轴器。
7.
将X轴(Y轴)驱动器的CH4(速度环增益)从
100更改为200。
8.
关闭电源并将其打开。
9.
通过以下方法再次检查X−Y表
步骤7和8在“检查原点位置’。
电机侧螺母
N耦合
(17毫米 )
滚珠丝杠侧螺母
马达
(17毫米 )
领导
滚珠丝杠
rh5
服务手册
5.3X−Y表的来源和超限检查和调整
da3sec−83−8ko−a0
5.3
−
2
4
检查/调整X
−
Y表极限分配器
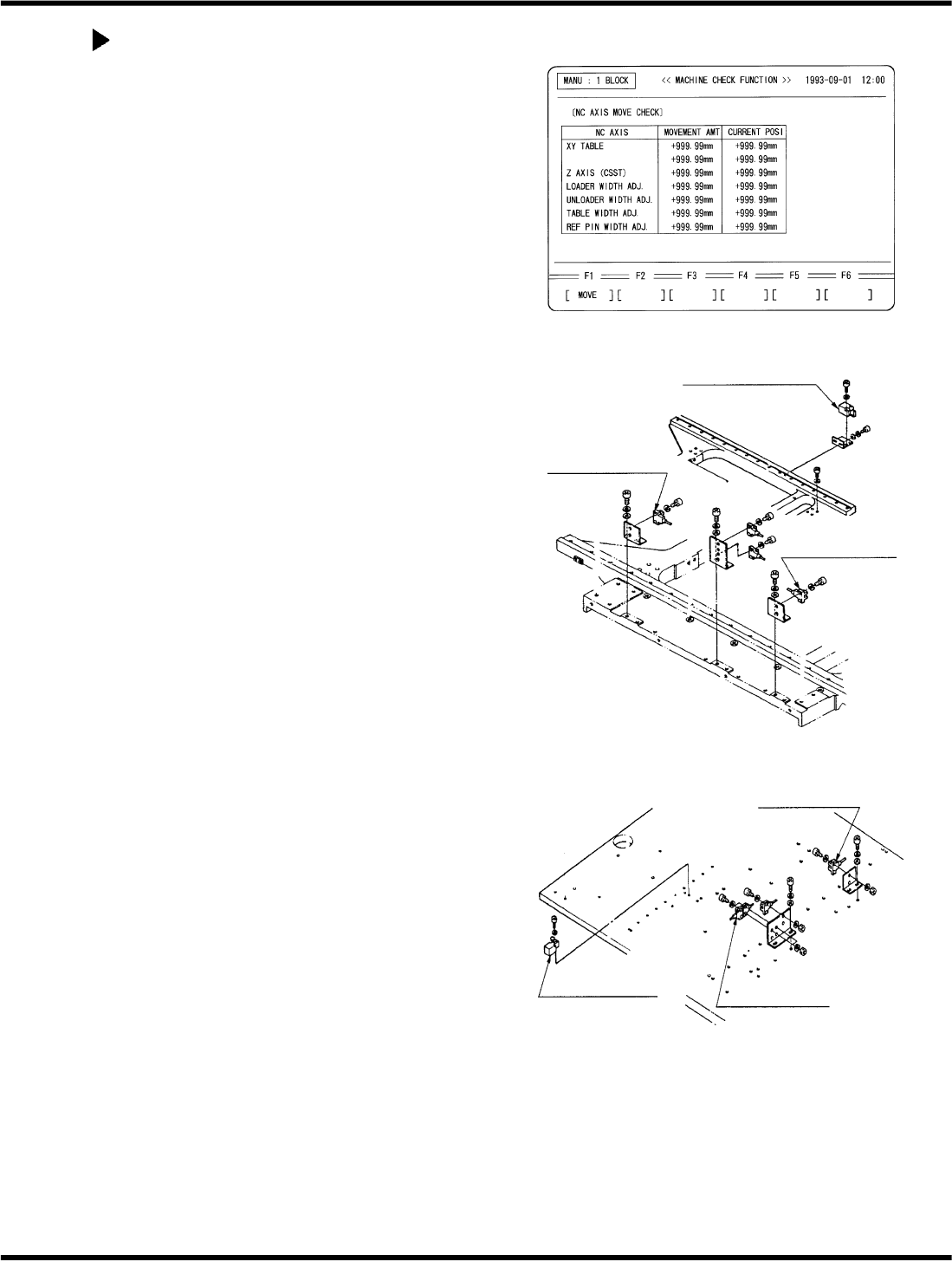
1.
通 过 主 控 面 板 选 择 “NCAXIS 移 动
CHECK”=“NCAXIS JOG CHECK。 输入到X和
的距离(数值
−轴限制传感器,并移动轴,以确保传感器相应
亮起。
<m>
十−轴限位传感器:
加上限制
(第273.40+至第273.50+)
减去上限
(−183.40至−183.50)
−轴极限传感器:
加上限制
(+1.40至+1.50)
减去上限
(−256.40至256.50−)
<会>的
十−轴限位传感器:
加上限制
(第346.40+至第346.50+)
减去上限
(−256.40至256.50−)
−轴极限传感器:
加上限制
(+1.40至+1.50)
减去上限
(386.40−至386.50)
2.
如果这些传感器没有早期检测或检测,则通过移
动传感器支架来调整传感器。
=检查=
•
调整后,再次移动轴,并检查它们在传感
器上被检测到,轴的移动不超过指定的距
离(显示数值)。
•
检 查 狭 缝 板和 每 个光 子 模 拟 没 有 任 何 阻
碍。
十−轴安全限位开
关
X−轴+极限传
感器
−轴−极限传
感器
−轴−极限传
感器
−轴安全限位开关
−轴+极限传
感器
rh5
服务手册
da3sec−83−8lo−a0
5.4
−
2
5.4
装载机/卸载皮带更换和调整
5.4
装载机/卸载皮带更换和调整
判决编号。
da3sec−83−8lo−a0
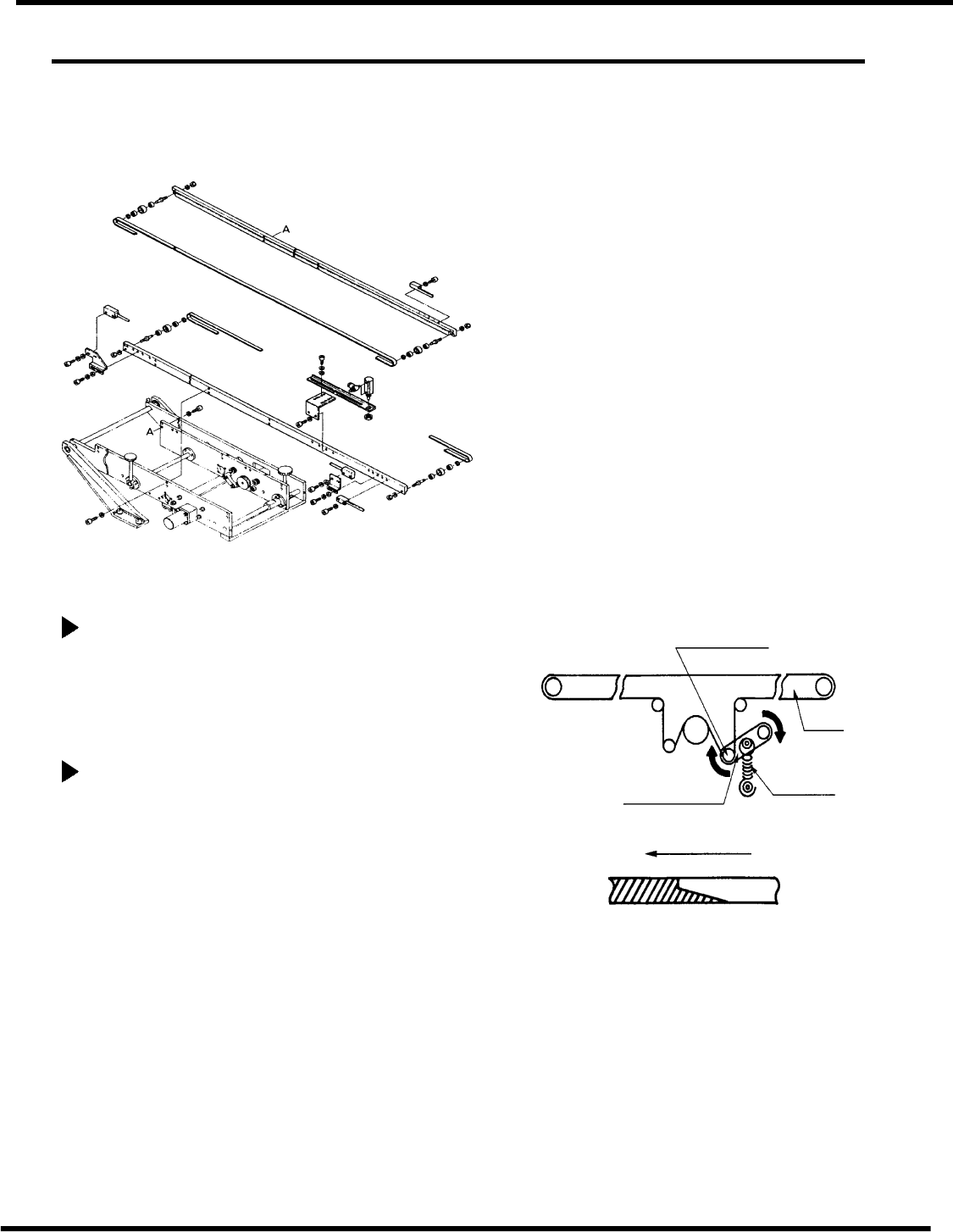
拆除皮带
1.
拆下弹簧,提高张力杆。 然后用手拆下
皮带。
什么时候表演
•
当皮带弹出或切断时
•
当皮带因磨损而打滑时
张力辊
带了条新皮带
1.
在钢轨上设置一个新的皮带,并将其钩到张
力辊上,观察到接缝。
=检查=
•
确保皮带接缝朝左如图所示。
•
当一个或多个皮带因磨损而需要更换
时,一次更换所有四个皮带。
旋转方向
带缝
腰
带
春天
张力杠杆