Q170226E01 中文版.pdf - 第282页
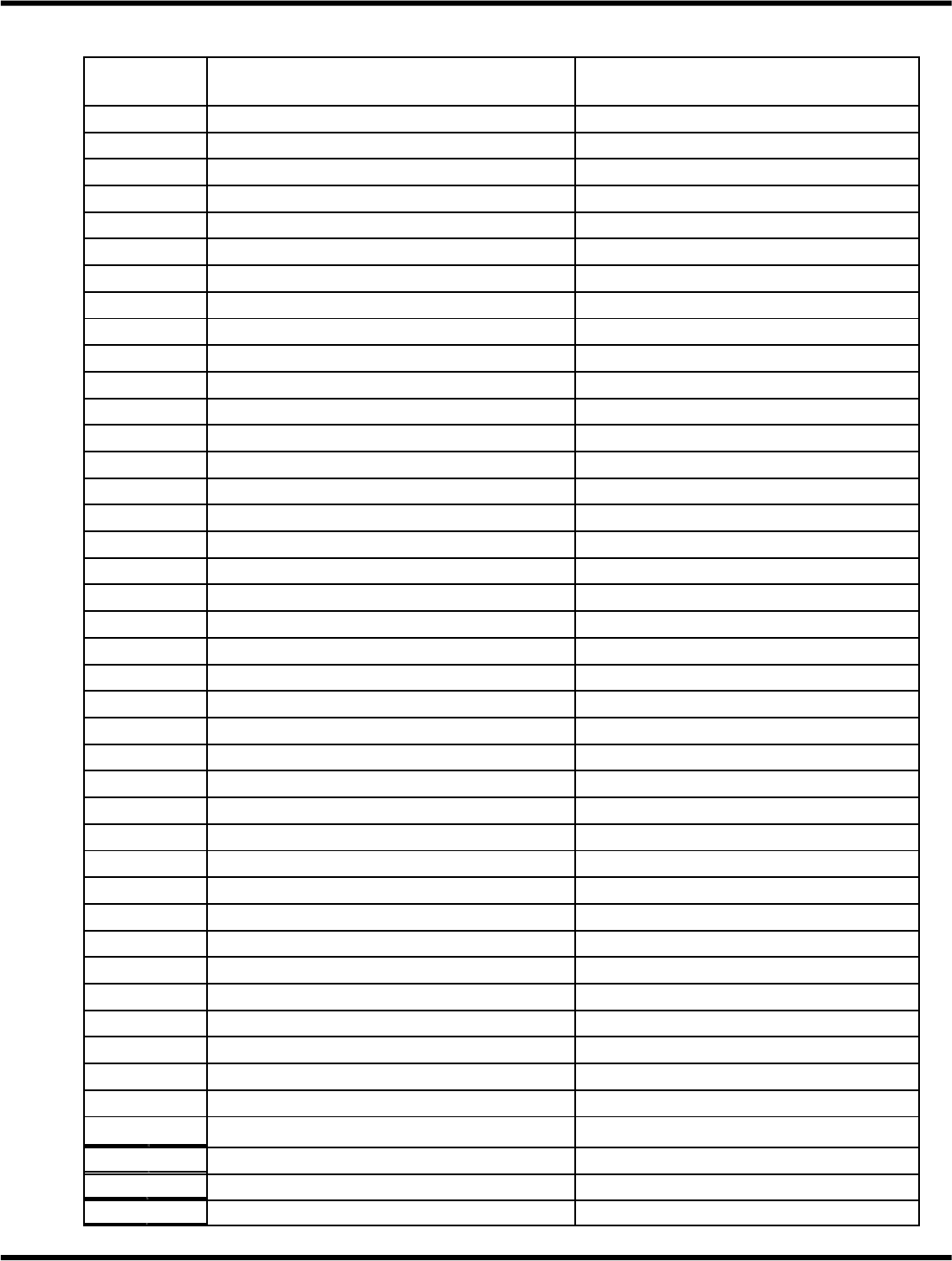
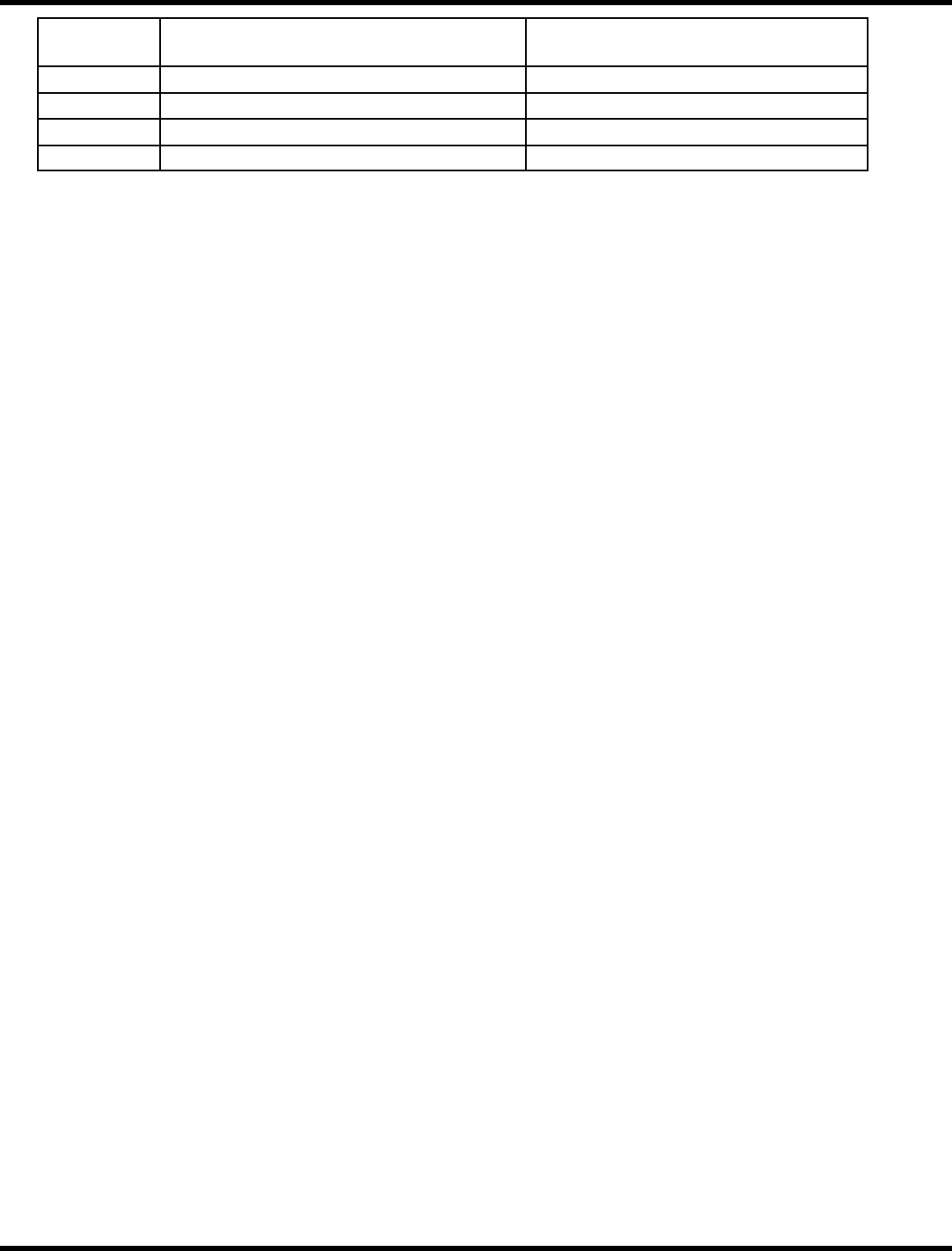
rh5 服务手册 7.2交流伺服电 机调整 7.2 − 13 13 da3s ec − 84 − 300 − a0 参数编号。 名字 默认 CN − 2A 电机选择 165 cn − 2B 控制系统选择 0 CN − 2C PG电源电压变化 52500 CN − 2D 输出信号选择 210
rh5
服务手册
7.2交流伺服电机调整
da3sec−84−300−a0
7.2
−
10
12
(凸轮轴)
参数编号。
名字
默认
cn−00−0003
抵消
cn−01
内存开关1
0000000000001100
cn−02
内存开关2
0000000000000000
cn−03
速度指令增益
1400
cn−04
速度循环增益
180
cn−05
恒速回路集成
1000
cn−06
紧急停止扭矩
800
cn−07
软启动时间(加速)
0
cn−08
正常旋转扭矩限制
800
第九−
反向旋转扭矩限制
800
cn−0A
编码器脉冲分割比
1000
cn−0B
旋转检测水平
20
CN−0C
模式开关(扭矩命令)
200
cn−0D
模式切换(速度命令)
0
CN−0E
模式切换(加速命令)
0
cn−0F
模式开关(偏差脉冲)
0
cn−10
慢跑速度
500
cn−11
编码器脉冲计数
4096
cn−12
基础区块等待时间
0
第13−
扭矩命令增益
30
第14−
转矩控制I处的转速控制
10000
cn−15
输出制动命令的速度电平
100
cn−16
等待时间从SV关闭到制动命令
50
cn−17
扭矩命令过滤常数
(4)
cn−18
正常旋转侧外扭矩限制
100
cn−19
反向旋转侧外扭矩限制
100
cn−1A
位置回路增益
40
cn−1B
定位完全宽度
7
CN−1C
偏见
0
CN−1D
向前进
0
CN−1E
太多了
1024
CN−1F
内部设置速度选择(第一速度)
100
cn−20
内部设置速度选择(第二速度)
200
cn−21
内部设置速度选择(第三速度)
300
cn−22
速度重合信号输出宽度
10
cn−23
软启动时间(减速)
0
cn−24
电子齿轮比(分子)
4
cn−25
电子齿轮比(分母)
1
第26−
恒定在定位命令速度变化
0
第27−
前馈滤波器
0
cn−28
速度回路补偿常数
0
cn−29
零钳位
10
rh5
服务手册
7.2交流伺服电机调整
7.2
−
13
13
da3sec−84−300−a0
参数编号。
名字
默认
CN−2A
电机选择
165
cn−2B
控制系统选择
0
CN−2C
PG电源电压变化
52500
CN−2D
输出信号选择
210
rh5
服务手册
7.2交流伺服电机调整
da3sec−84−300−a0
7.2
−
10
14
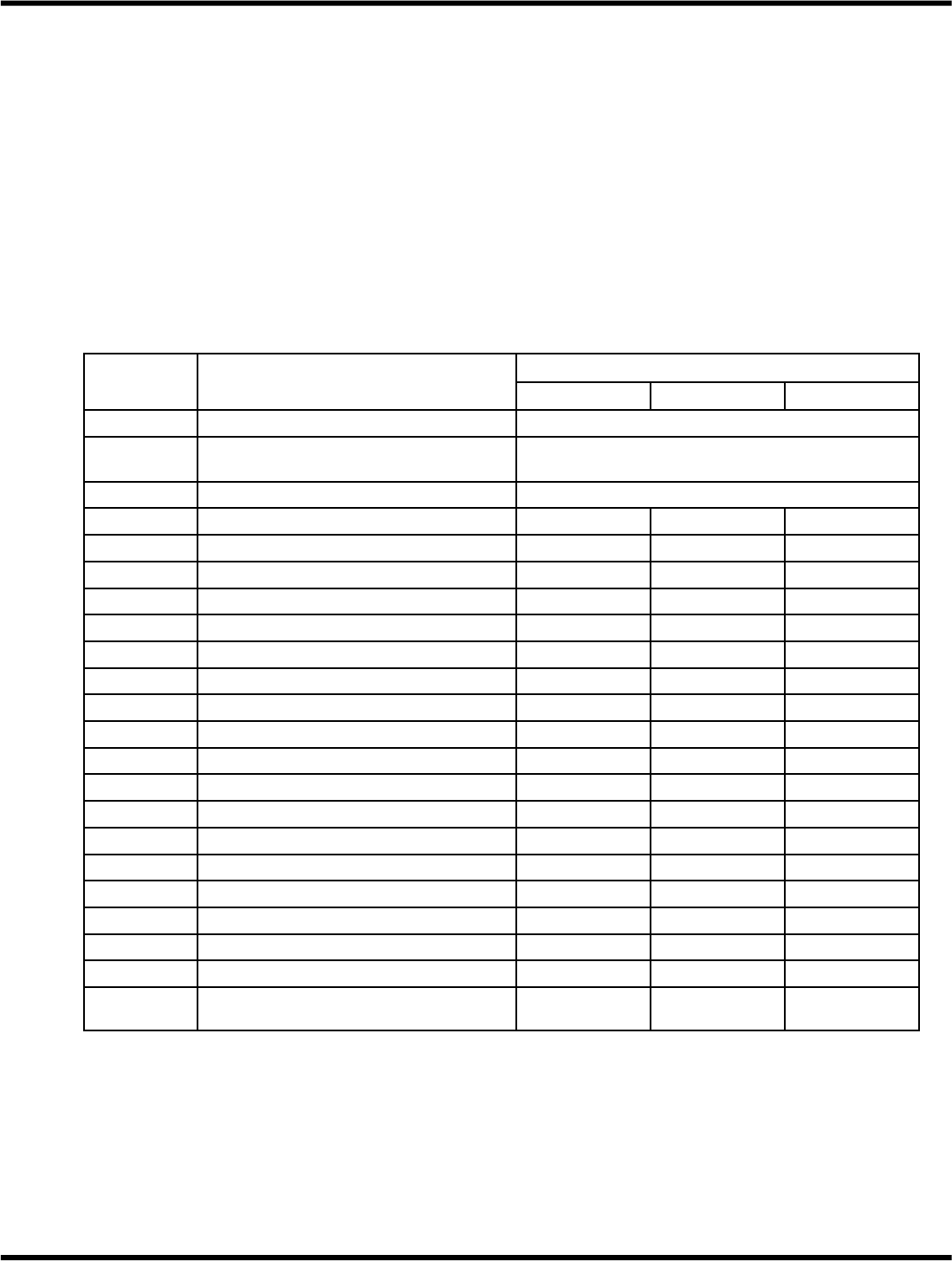
交流电机驱动器设置表(RH5(M)<NM
−
8844R>)
=参考=
•
值()需要微调。
•
如果表停止后电机振荡,则调整Cn−17。
•
使用电机驱动器如下:
X轴:DR2−02ACY27,Y轴:DR2−04ACY27,Z轴(62−给料机):DR2,
08ACY27,Z轴(80−给料机):CACR−SR15VE13S,凸轮轴:
CACR−SR20VE17SY19
•
通过数字运算器调整Cn−00−003的偏移量。 (参见“7.3’。 )
•
用星号标记的值显示与定位延迟误差对应的新参数。
•
设置Cn−01和Cn−0A后,关闭机器的电源。
X/Y/Z轴(62
−
馈线)
参数编号。
名字
默认
X轴
Y轴
Z轴
cn−00−003
抵消
cn−01
内存开关1
ffdcba9876543210000
10000000000
cn−02
内存开关2
0000000000000000
cn−03
速度指令增益
1300
1300
cn−04
速度循环增益
(140)
(150)
cn−05
咨询速度回路集成
* 50000
* 50000
cn−06
紧急停止扭矩
300
300
cn−07
软启动时间(加速)
0
0
cn−08
正常旋转扭矩限制
300
300
第九−
反向旋转扭矩限制
300
300
cn−0A
编码器脉冲分割比
1000
1000
cn−0B
旋转检测水平
20
20
CN−0C
模式开关(扭矩命令)
200
200
cn−0D
模式切换(速度命令)
* 100
* 100
CN−0E
模式切换(加速命令)
0
0
cn−0F
模式开关(偏差脉冲)
0
0
cn−10
慢跑速度
500
500
cn−11
编码器脉冲计数
2048
2048
cn−12
从制动命令到SV关闭的延迟时间
0
0
第13−
扭矩命令增益
30
30
第14−
转矩控制I处的转速控制
4500
4500
cn−15
输出制动命令的速度电平
100
100