Q170226E01 中文版.pdf - 第356页
rh5 服务手册 8.4交流伺服电 机驱动 器 数字操作 员指示故 障排除 da3s ec − 85 − 480 − a0 8.4 − 4 4 数字操作员 指示故障排除 数字操作 员指示( =注 =1) (追踪监 测) 照明条件 可能的原 因 反措施 太大了 当电源提供 给控制时,请 点亮 电路。 缺陷控制电 路板(1PWB ) 替换 servopac k。 当电源供应 到主电源时, 请点亮 电路和伺服 电源打开。 电流反馈电 路缺陷主…
rh5
服务手册
8.4交流伺服电机驱动器
8.4
−
1
3
da3sec−85−480−a0
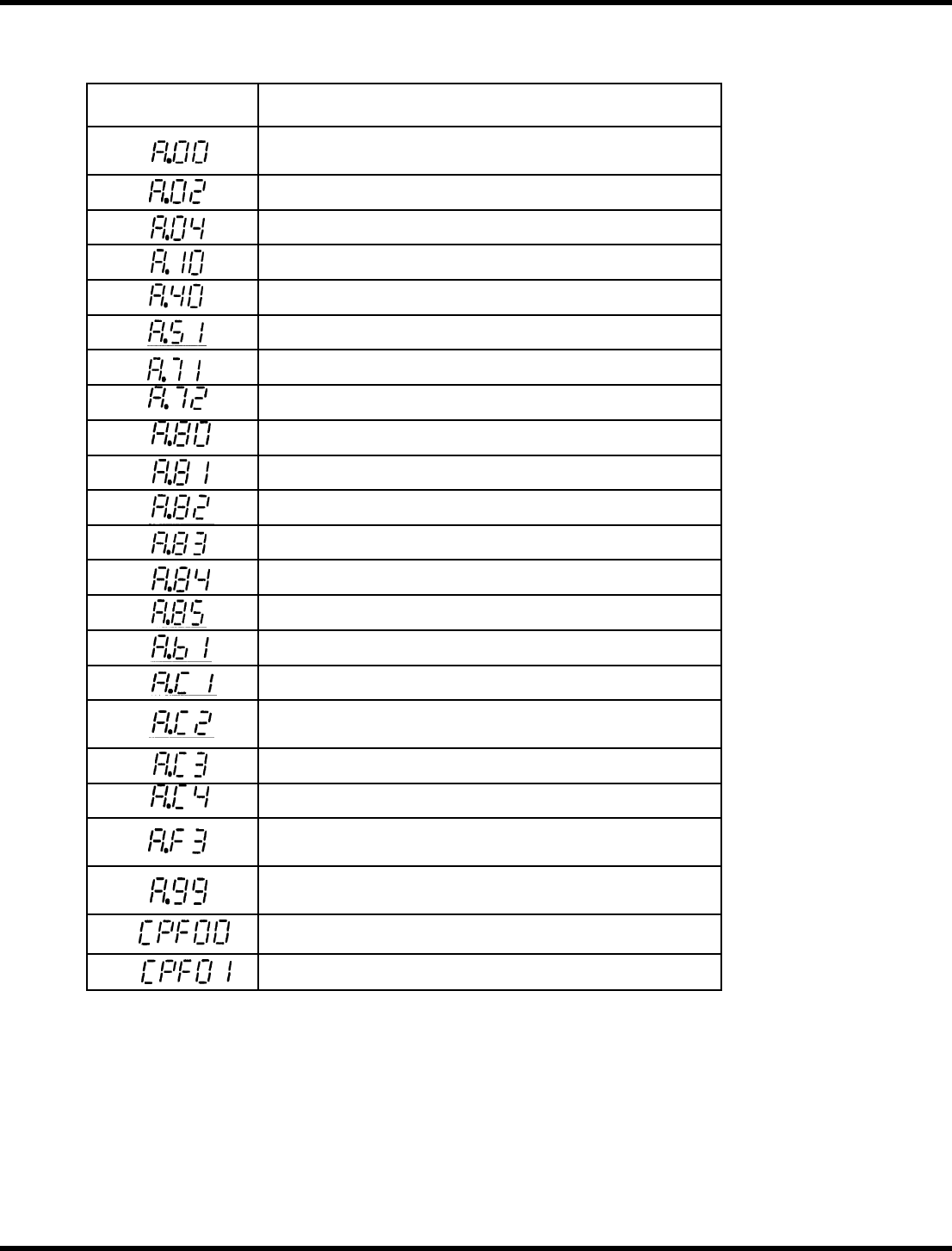
数字操作员显示确认错误
使用数字运算符和回溯数据显示错误
数字操作员
(回溯数据)
探测
绝对编码器数据错误(只有当使用绝对编码器时。 )
参数分解
参数设置错误
过流(或散热器过热)
压力过大
超速(检测到110%的最大值。 速度)
过载(瞬间过载)
过载(连续过载)
编码器错误(只有当使用绝对编码器时。 )
编码器备份报警 *1
编码器检查和错误*1
编码器电池错误 *1
编码器绝对错误 *1
编码器超速 *1
参考输入读取错误
过载(电机或编码器布线错误)
相位检测错误(只有当使用增量编码器时。 )
−,PG信号线的PB−相断开
上位机−PG信号线的相位断开
瞬间失电报警(当电源再次打开时,在电源保持时间内检测
到。 )
不适用于报警
报警复位电源打开(仅用于回溯数据)
数字操作员传输错误1 *2
数字操作员传输误差2 *2
*1 只有当使用12−位绝对编码器时。
*2 以下表示数字运算符错误。 未检测为回溯数据。
=检查=
在检查X轴和Y轴时,使用连接到Z−轴驱动程序的数字运算符。
rh5
服务手册
8.4交流伺服电机驱动器
数字操作员指示故障排除
da3sec−85−480−a0
8.4
−
4
4
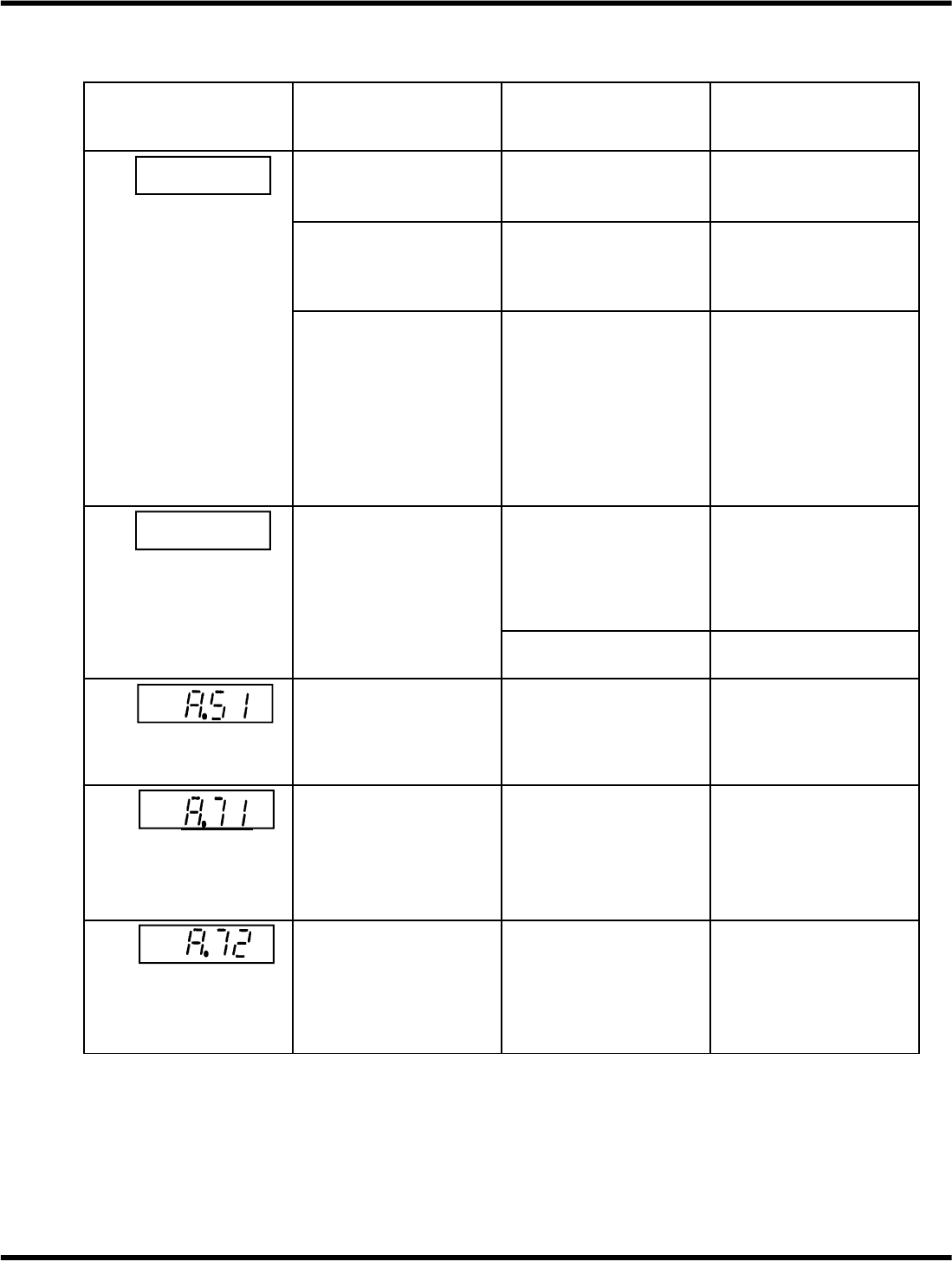
数字操作员指示故障排除
数字操作员指示(=注
=1)
(追踪监测)
照明条件
可能的原因
反措施
太大了
当电源提供给控制时,请
点亮
电路。
缺陷控制电路板(1PWB)
替换
servopack。
当电源供应到主电源时,
请点亮
电路和伺服电源打开。
电流反馈电路缺陷主电
路晶体管模块
替换
servopack。
在操作过程中保持。
即使在关闭电源后也要
亮起来,然后再打开。
操作可以在一段时间后
通过按下<重置>键恢
复。
在SERVOPACK附近的环境
温度超过55°C。
的环境温度进行调节
服务范围为55°C
或者更低。 (热沉过热)
压力过大
电机加速或减速时亮起
灯。
加载CD
2
太大了。
•
用转换到电机轴的值检
查机器的惯性。
•
连接 再
生装置。
缺陷控制电路板
替换
servopack。
超速了
当引用是
输入,电机运行快速,LED
打开。
•
电机连接错误
•
光学 编码器连
接错误
•
校正电机连接。
•
在2CN上检查A、B和C阶
段 的 脉 冲 , 并 正 确 布
线。
(瞬时过载)
操作过程中亮灯。
关闭电源到控制电路,
然后打开开始操作。
操作持续数秒到几十
秒,扭矩超过额定值。
检查过载情况,必要时进
行调整。
(连续超载)
操作过程中亮灯。
关闭电源到控制电路,
然后打开开始操作。
行动持续了几十年
秒到几百秒,扭矩超过
额定值。
检查过载情况,必要时进
行调整。
rh5
服务手册
8.4交流伺服电机驱动器
数字操作员指示故障排除
8.4
−
5
5
da3sec−85−480−a0
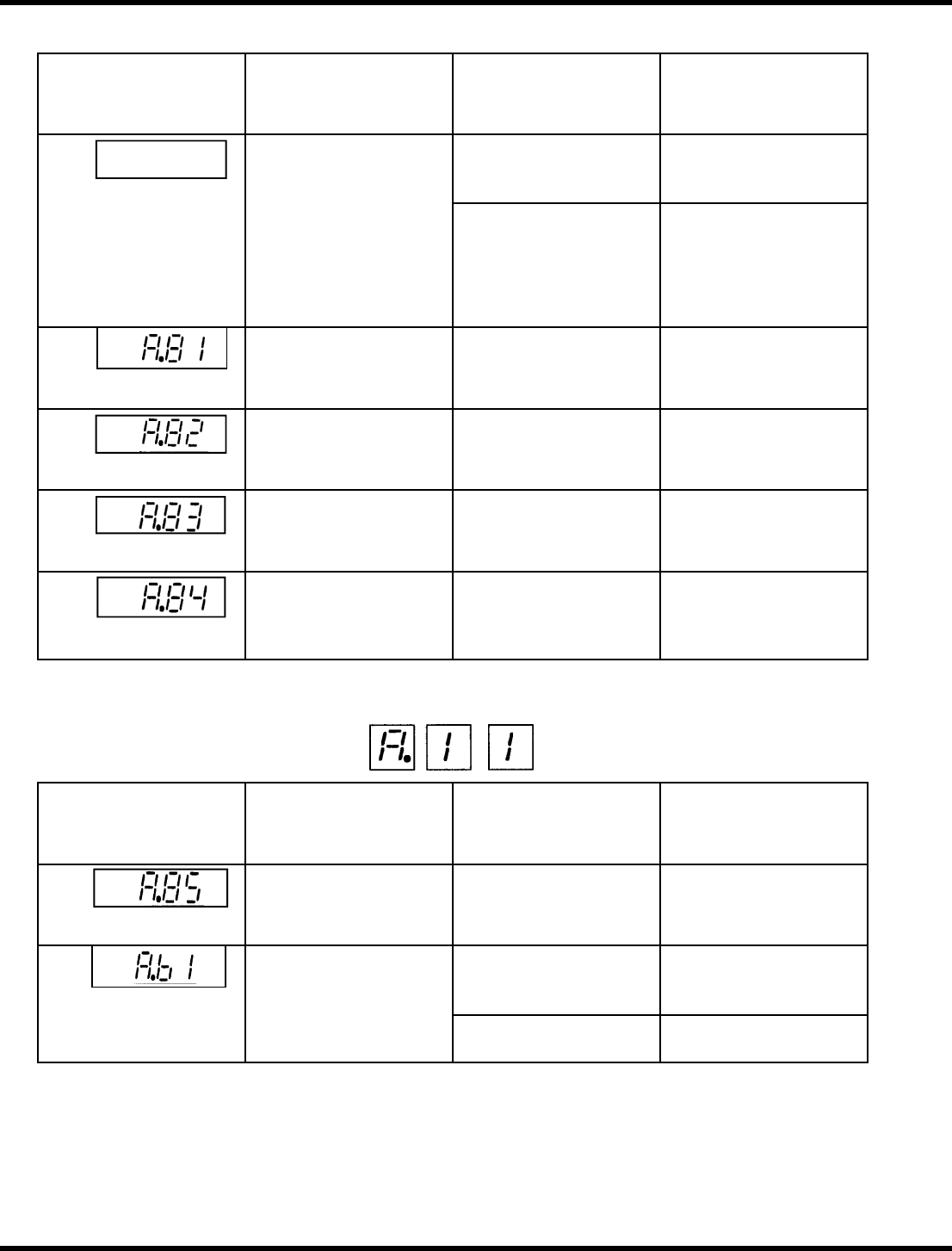
数字操作员指示(=
注=1)(回溯监视器)
照明条件
可能的原因
反措施
开灯的时候
行动。
接线错误或
不完整的接触
检查并校正信号
阶段A,B的电缆
编码器错误
绝对编码器。
和2CN的C。
SERVO PACK脉冲计数器故
障。
•
关闭SEN信号,重置警
报,然后将SEN信号打
开。
•
接受 噪声−控制措
施。
输入SEN信号后点亮。
绝对编码器电池电压下
降。
设置绝对编码器。
编码器备份错误
编码器校验和错误
输入SEN信号后点亮。
绝对编码器
内存数据检查错误
设置绝对编码器。
编码器电池报警
输入SEN信号后点亮。
绝对编码器电池电压下
降。
更换电池,进入SEN信号两
次。
编码器绝对错误
输入SEN信号后点亮。
绝对编码器故障。
关闭SEN
信号,重 置 警 报, 然
后将SEN信号打开。
=暗示=
显示格式如所示。
数字操作员指示(=
注=1)(回溯监视器)
照明条件
可能的原因
反措施
编码器超速
输入SEN信号后点亮。
当输入SEN信号时,电机
正在转动。
当电机停止时输入SEN信
号。
操作过程中亮灯。
与参考输入阅读器的错误
操作
按<复位>键,恢复操作。
引用读取错误
参考输入阅读器故障
替换
servopack。