WPC6服务手册.pdf - 第92页
维修手册 WPC5 / WPC6 第 3 页 - 92 对于光栅 LB 类型 1 : 碰撞光栅的状态将通过集成 LE D 显示: 红色 LED 亮起 = 未触发(正常模 式) 红色 LED 不亮 = 触发(光束中断 - 崩溃情况) 绿色 LED 亮起 = 运行准备就绪 / 稳定显示(最佳光栅设置) 绿色 LED 不亮 = 运行准备就绪 / 稳定性显示(无最佳光栅设 置) LED 闪烁红色和绿色 = 正确设置(激光…
维修手册 WPC5 / WPC6
第 3 页-
91
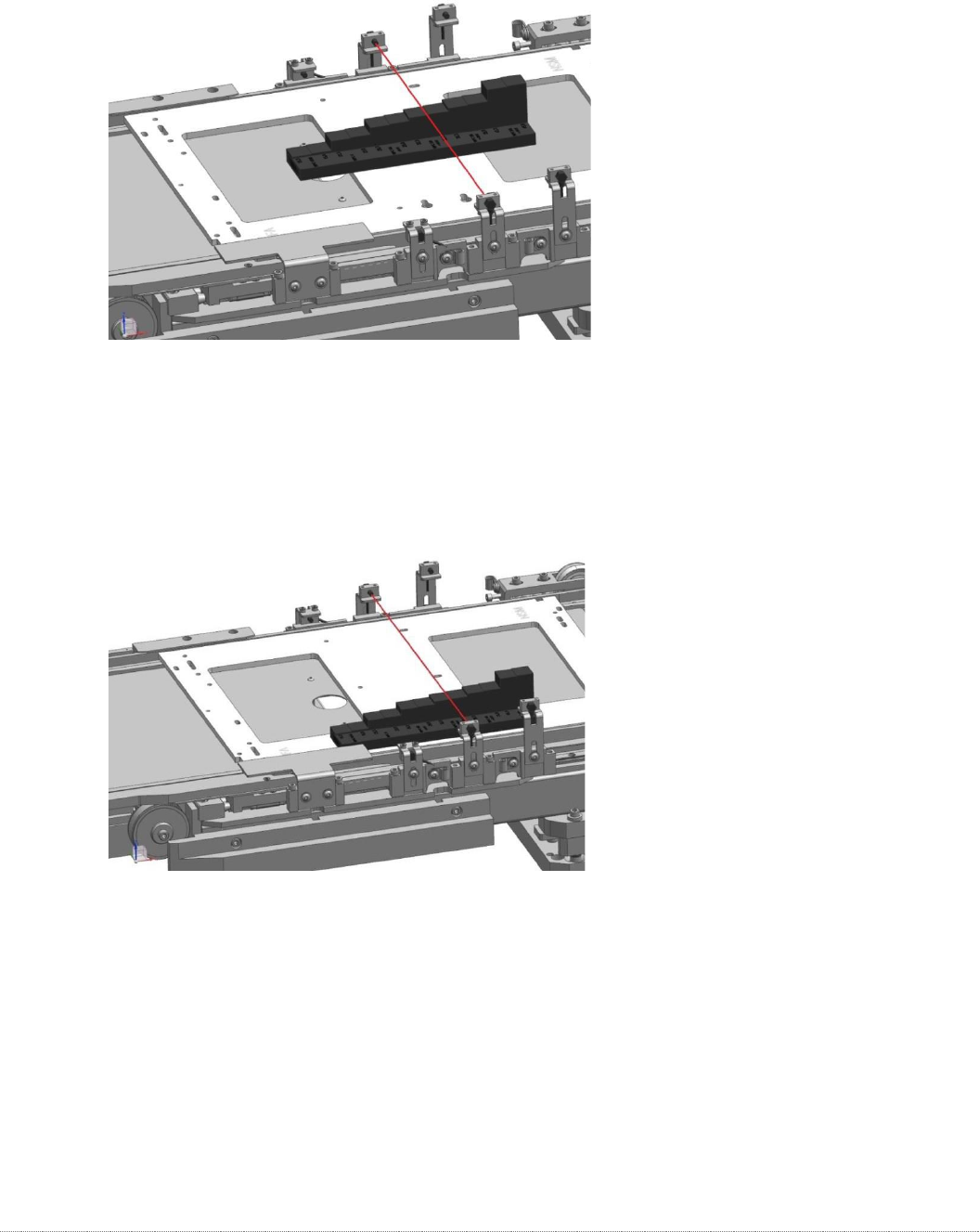
现在将
“
Adjustment-Jig crash-LS-WPC4-6 (step)
”
[03093895-01] 插入底板的中心位置。
将带有“步距规”的底板在进给轴上缓慢向前移动。
挡光板必须恰好位于相应平台对位置的水平面上。
.
现在将
“
Adjustment-Jig crash-LS-WPC4-6 (step)
”
[03093895-01] 插入底板的正确位置。
将带有“步距规”的底板在进给轴上缓慢向前移动。
挡光板必须恰好位于相应平台对位置的水平面上。

维修手册 WPC5 / WPC6
第 3 页-
92
对于光栅 LB 类型 1:
碰撞光栅的状态将通过集成 LED 显示:
红色 LED 亮起 = 未触发(正常模式)
红色 LED 不亮 = 触发(光束中断 - 崩溃情况)
绿色 LED 亮起 = 运行准备就绪/稳定显示(最佳光栅设置)
绿色 LED 不亮 = 运行准备就绪/稳定性显示(无最佳光栅设置)
LED 闪烁红色和绿色 = 正确设置(激光束未被中断)
对于光栅 LS TYP 2:
光栅的状态显示在控制单元的显示屏(7 段)以及显示屏旁边的 LED 上。
LED 亮起(橙色)= 正常功能(光束未中断)
LED 熄灭 = 激活(光束被中断 – 崩溃情况)显示值在正常功能
下高于 2500。
单位切换(LED 熄灭)的阈值约为 500。
=> 100% 中断 = 0,
第一步:设置高度
在相关发射器/接收器之前,将具有整个高度设置的设置规放置在华夫饼托盘托架上:
⇨
描述信号(LED、值),见上文。
将量规或华夫饼托盘托架移动到触发高度设置。
检查碰撞灯护栏光束是否在触发高度设置处中断。
将“Setting gauge crash WPC4 LS-6 (level)”【03093895-02】放在另外两个位置。
碰撞梁传感器必须在此处安全触发。
重复上述步骤,直到将碰撞光栅设置到正确的高度,并在整个区域的所有触发点可靠切
换。
第二步:功能测试
检查是否切换了正确的输出。
转到主软件视图并打开菜单功能:
⇨
传感器和功能
⇨
位置
⇨
检查 WPC 的功能
⇨
高级功能
⇨
⇨
WPC E/A 端口。检查是否启用了正常组件的碰撞传感器或高组件的碰撞传感器选项。

维修手册 WPC5 / WPC6
第 3 页-
93
6
3.7.8
传感器 参考传感器“升降轴”
零部件
升降轴参考点接近开关 [03047278-01]
拆卸/安装
松开参考传感器上的两个紧固螺钉 (1)。
松开电缆夹并取下电缆扎带。
松开连接电缆直至控制单元背板,然后将其从端子排上拔下。
安装参考传感器,使传感器表面 (2) 指向一侧。
将参考传感器与右侧和顶部塞子边缘 (3) 平行对齐。
恢复电气连接并将连接电缆固定到位。
设置
检查参考传感器的功能和正确位置。
为此,请在主视图中打开以下功能:
⇨
传感器和功能
⇨
位置
⇨
检查 WPC 的功能
⇨
高级功能。
在轴输入字段中选择提升轴按钮。
在输入字段中选择 Reference bero 按钮(参见“4.2.3 Reference Proximity Switch
(Bero)”[➙ 4-126])。
⇨
提升轴移动,接近参考传感器并确定参考点。
⇨
将显示计算出的值,然后可以使用“提交”按钮保存。
如果出现错误消息,如有必要,借助槽 (2) 校正限位开关的机械位置并重复测量程序。