2OM-1321-005_w.pdf - 第220页
6 - 19 Tg 1298 -ID-OP 5. “インチング操作” サブメニュー 各ユニットのインチング操作を行います。 • 画面の表示 装置メンテナンスサブメニューバーの[インチング操作]ボタンを 押すと、以下の画面が表示されます。 [6] [9] [5] [4] [3] [2] [8] [1] [7] Fig.2F15 “インチング操作”サブメニュー画面 • 画面の構成 [1] タブ “インチング操作”サブメニュー画面は、9 つの…

6-18
Tg1298-ID-OP
[クリーニング吸引(吸引 - 解除)]ボタン
ソルダペーストをクリーニングペーパー越しに吸引します。
ノート
吸引に必要なブロワユニットは、オプションです。
[溶剤吐出(吐出 - 解除)]ボタン
溶剤を吐出します。
[クリーニング ( 主 ) 1
サイクル(サイクル)]ボタン
クリーニング主の動作を 1 サイクル行います。
[クリーニング ( 副 ) 1
サイクル(サイクル)]ボタン
クリーニング副の動作を 1 サイクル行います。
[2] 動作状況
各ユニットの動作状況が表示されます。
4.5 “クリーニング部”タブ
0602-001
6-19
Tg1298-ID-OP
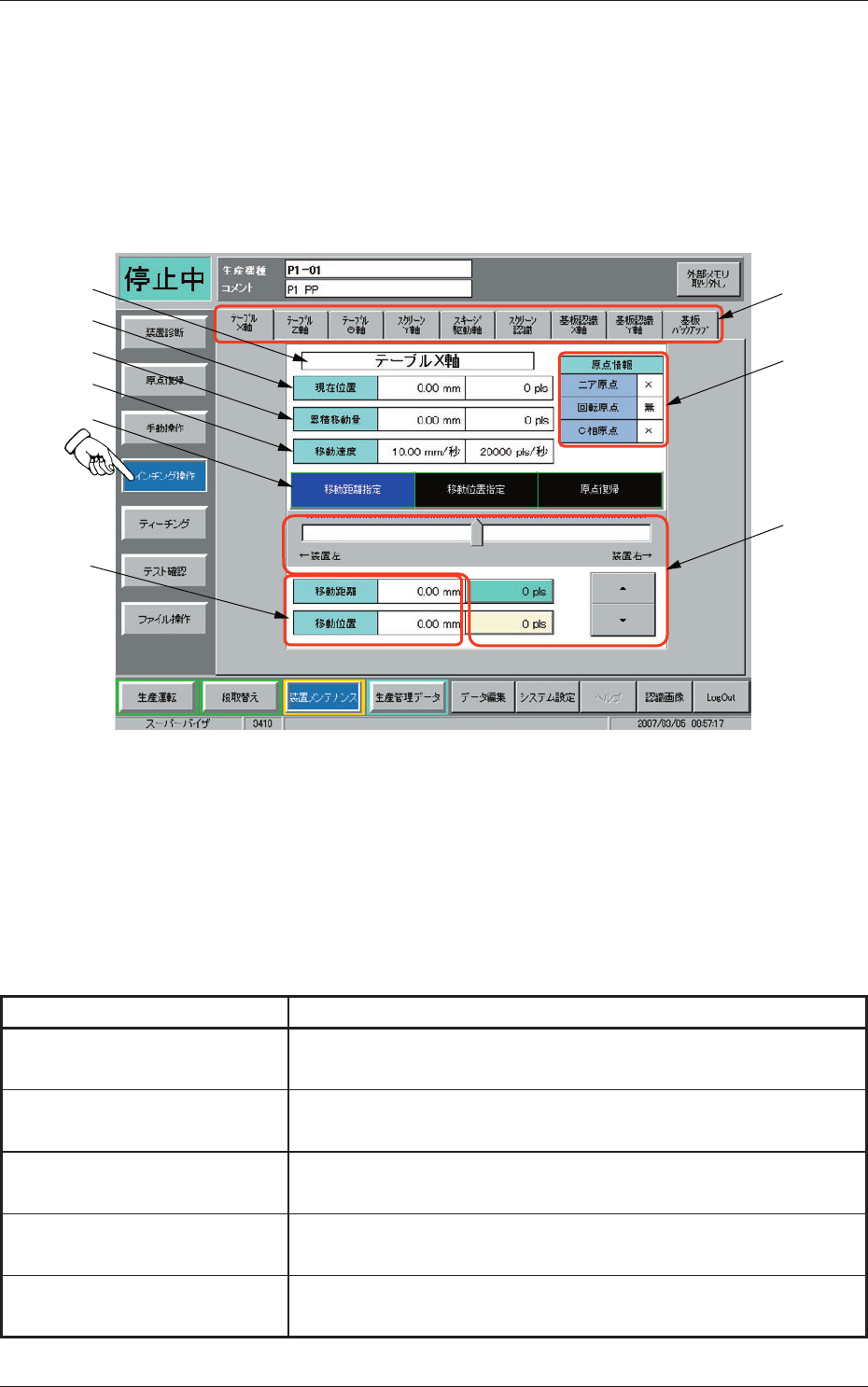
5. “インチング操作” サブメニュー
各ユニットのインチング操作を行います。
•
画面の表示
装置メンテナンスサブメニューバーの[インチング操作]ボタンを
押すと、以下の画面が表示されます。
[6]
[9]
[5]
[4]
[3]
[2]
[8]
[1]
[7]
Fig.2F15 “インチング操作”サブメニュー画面
•
画面の構成
[1]
タブ
“インチング操作”サブメニュー画面は、9 つのタブシートに分
かれており、タブを押すと各タブシートが表示されます。
Table 2F3
タ ブ 内 容
テーブル X 軸 移動速度、移動距離、移動位置を指定して、テーブルの X 軸
に対するインチング操作が行えます。
テーブル Z 軸 移動速度、移動距離、移動位置を指定して、テーブルの Z
軸
に対するインチング操作が行えます。
テーブル
θ
軸 移動速度、移動距離、移動位置を指定して、テーブルの
θ
軸
に対するインチング操作が行えます。
スクリーン
Y 軸 移動速度、移動距離、移動位置を指定して、スクリーンの Y
軸に対するインチング操作が行えます。
スキージ駆動軸 移動速度、移動距離、移動位置を指定して、スキージ駆動軸
のインチング操作が行えます。
5. “インチング操作”サブメニュー
0703-002
6-20
Tg1298-ID-OP
Table 2F4
タ ブ 内 容
スクリーン認識 移動速度、移動距離、移動位置を指定して、スクリーン認識
の X 軸に対するインチング操作が行えます。
基板認識 X
軸 移動速度、移動距離、移動位置を指定して、基板認識の X 軸
に対するインチング操作が行えます。
基板認識 Y 軸 移動速度、移動距離、移動位置を指定して、基板認識の Y
軸
に対するインチング操作が行えます。
基板バックアップ 移動速度、移動距離、移動位置を指定して、基板バックアッ
プ軸のインチング操作が行えます。
[2]
対象ユニット名称表示部
インチング操作するユニットと操作方向の軸の名称が表示され
ます。
[3] 現在位置
ユニットの現在の位置が、移動距離とパルス数で表示されます。
1パルスの mm 相当数値は、ユニットによって異なります。
[4] 累積移動量
ユニットの累積移動量が、移動距離とパルス数で表示されます。
[5]
移動速度
インチングでユニットを移動する速度が、距離 / 秒とパルス数
/ 秒で表示されます。
移動速度を変更する場合は、数値の表示エリアを押してテンキー
画面を表示し、パルス数 / 秒を入力します。
[6] 原点情報
ユニットが原点の位置にあることを検出する手段の種類と、そ
の手段の有無またはユニットの状態が表示されます。
ニア原点 : ユニットの直線運動をセンサで検出して判断する原
点
回転原点 : ボールネジの回転をスリットカムで検出して判断す
る原点
励磁原点 : パルスモータの回転角度を検出して判断する原点
原点表示
有 : 原点を検出する手段がある。
無 : 原点を検出する手段がない。
○ :
原点の位置にある。
× : 原点の位置にない。
5. “インチング操作”サブメニュー
0602-001