2OM-1321-005_w.pdf - 第62页
1 - 3 Tg 1298 -ID-OP 1.3. 印刷 0602 - 001 1.3 印刷 スクリーン スキージ テーブル 基板 Fig. 2A3 (1) 片側印刷の場合 スキージが印刷ストロークの奥側にある場合は、 “スキージ B (奥) ”が下降し、手前へ移動して印刷します。 スキージが印刷ストロークの手前側にある場合は、 “スキージ A (手前) ”が下降し、奥側へ移動して印刷を行います。 往復印刷の場合 “スキージ A(手前)…
1-2
Tg1298-ID-OP
1.2. 基板認識
0602-001
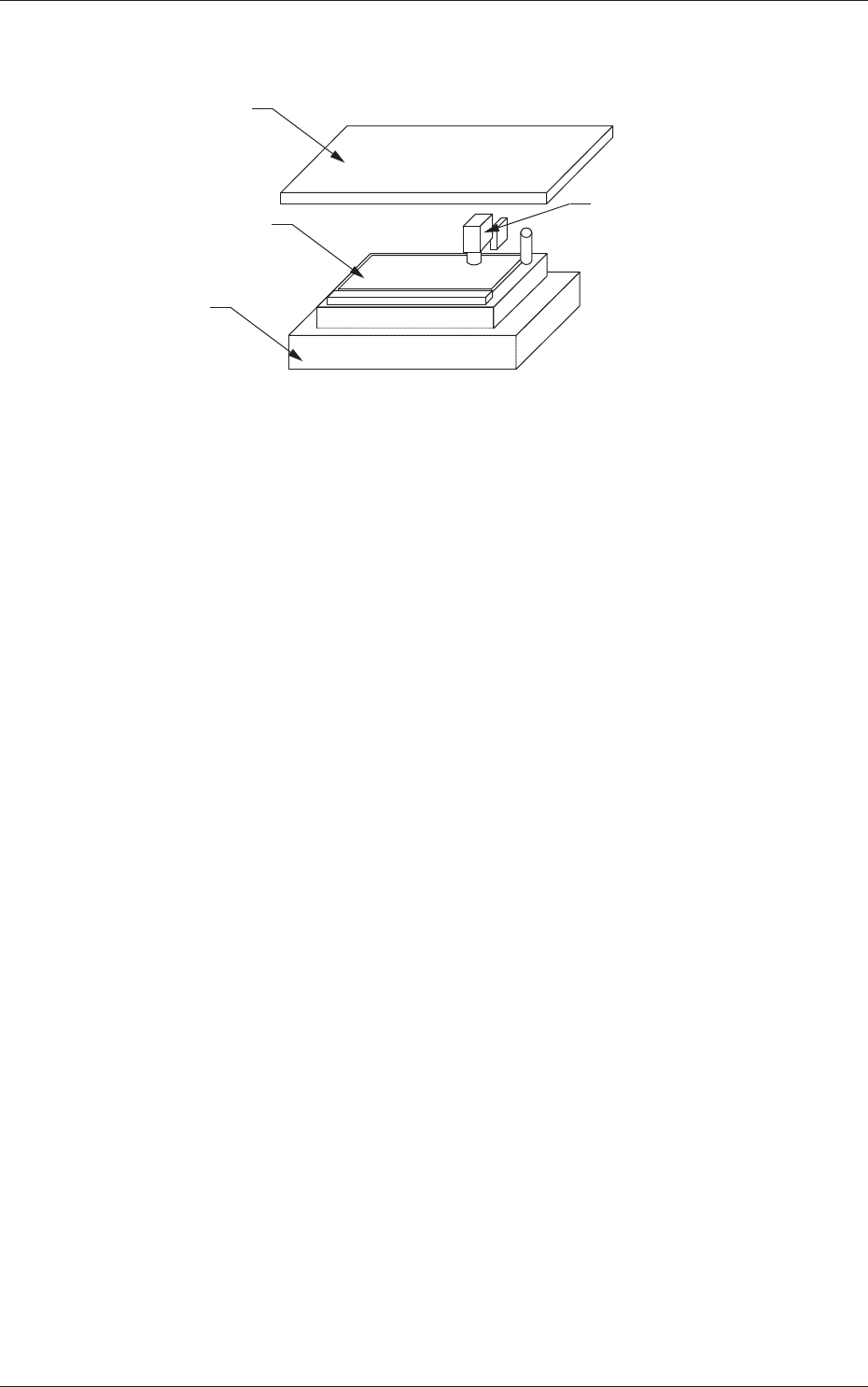
1.2 基板認識
スクリーン
基板
基板認識カメラ
テーブル
Fig. 2A2
(1) 基板認識カメラ駆動部が X および Y 方向へ移動し、2 個のマーク
を認識します。認識後、原点位置に戻ります。
(2) テーブルが印刷位置へ移動した後、“認識結果より算出した値”
だけテーブル X
軸,
θ
軸およびスクリーン
Y 軸が補正され、移動
します。
(3) テーブル Z
軸が“パターンプログラムで設定したギャップ量”
になるまでテーブルが上昇します。
1-3
Tg1298-ID-OP
1.3. 印刷
0602-001
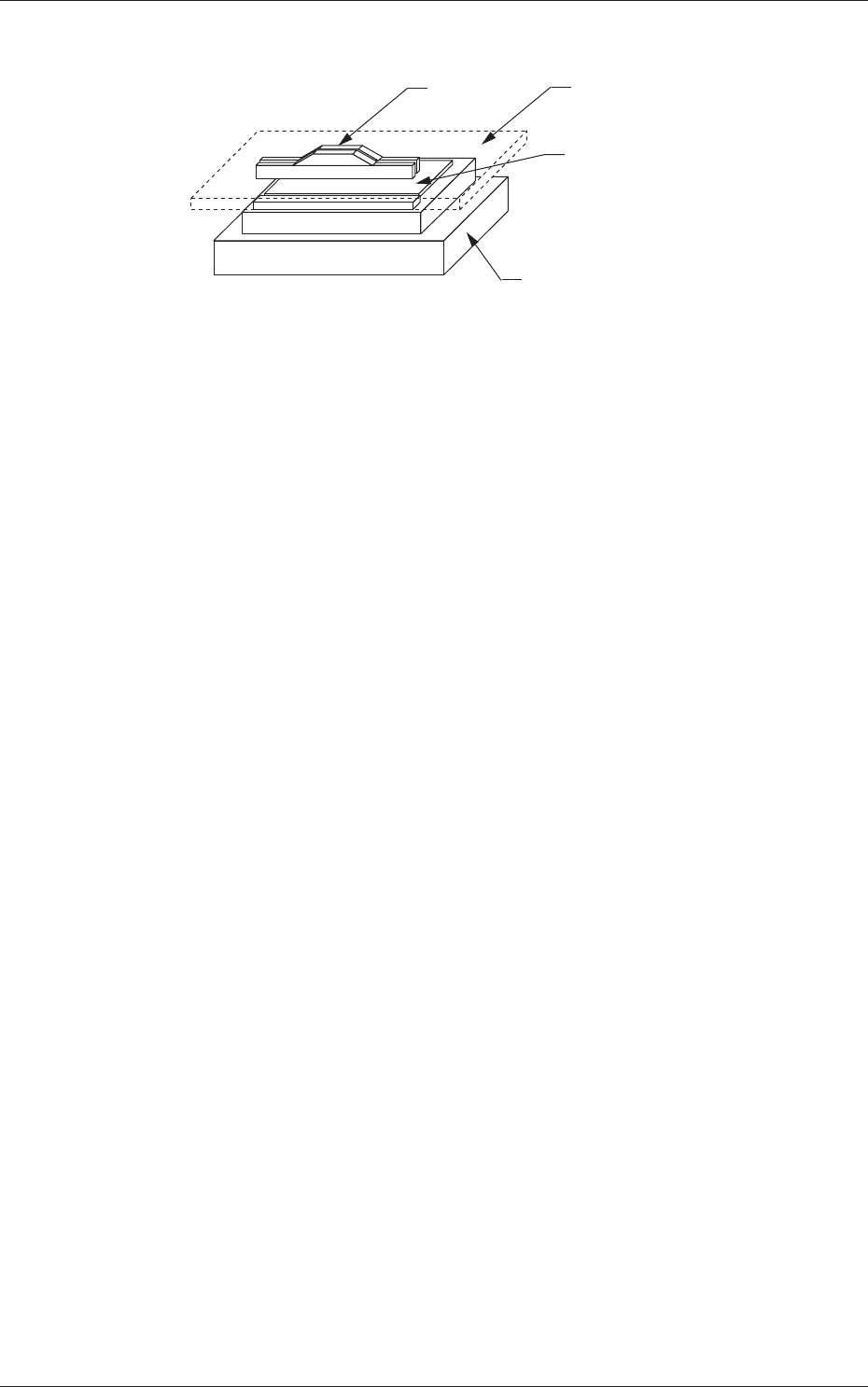
1.3 印刷
スクリーン
スキージ
テーブル
基板
Fig. 2A3
(1) 片側印刷の場合
スキージが印刷ストロークの奥側にある場合は、“スキージ B
(奥)”が下降し、手前へ移動して印刷します。
スキージが印刷ストロークの手前側にある場合は、“スキージ A
(手前)”が下降し、奥側へ移動して印刷を行います。
往復印刷の場合
“スキージ A(手前)”が下降し、奥側へ移動して印刷を行った後、
奥側でスキージ
A が上昇します。そして、“スキージ B(奥)”が
下降し、手前側へ移動して印刷を行います。
(2) スキージが停止した後、テーブルが下降した後にスキージが上
昇します。
または、スキージが先に上昇した後にテーブルが下降します。
どちらが先に動作するかは“パターンプログラム”により設定
できます。
1-4
Tg1298-ID-OP
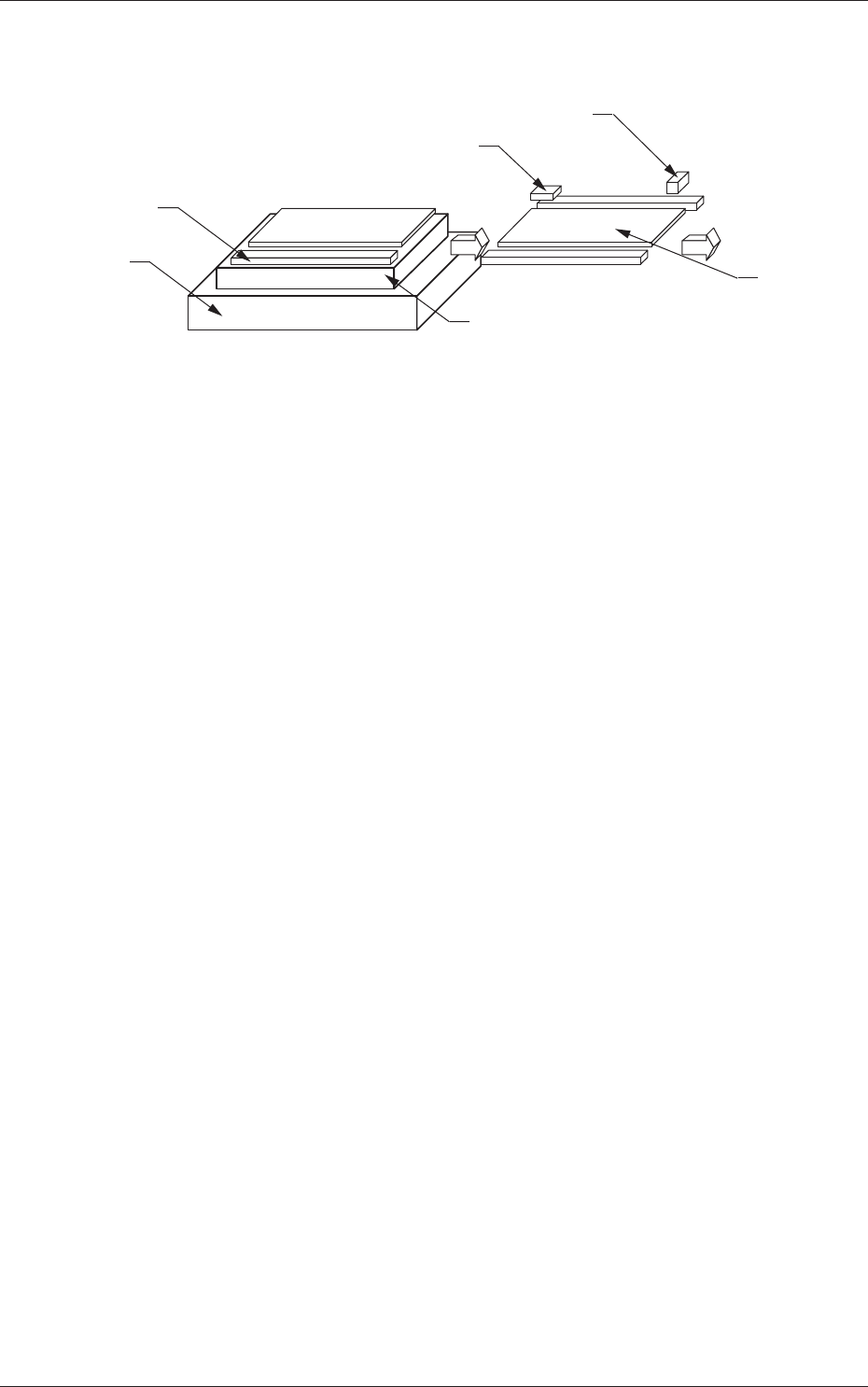
1.4 基板搬出
テーブル
基板クランプ
基板通過検出センサ
基板到着検出センサ
基板バックアップベース
基板
Fig.2A4
(1) 基板位置決め部が“基板クランプ”による基板の固定を解除し、
基板バックアップベースが下降して、基板が基板位置決め部の
ベルトコンベア上に移ります。
(2) テーブル(
θ
軸)が原点復帰し、テーブル(X
軸)が基板排出位
置まで移動します。
このとき、基板位置決め部の歯車が R コンベアの歯車と噛み合
います。
(3)
R
コンベアが駆動し、基板が R コンベアに移載したことを“基板
通過検出センサ”により確認されると、基板位置決め部を乗せ
たテーブルが原点へ移動します。
(4) “基板
到着検出センサ”により基板が検出されると、R コンベア
が停止します。
(5) 後工程
装置からの“ワーク要求信号”を受けると R コンベアが
駆動し、基板は後工程装置へ送られます。
(6) 後工程装置の“ワーク要求信号 OFF”で
R コンベアが停止します。
1.4 基板搬出
0602-001