JM-20_维修调整要领书.pdf - 第18页
维修调整要领书 1- 11 1-3 . 塑料导轨的更换 1-3 -1 . X 轴电缆拖链的更换 ● 40110451 : X_CABLE_BEAR ( L, X L 规格共用) 1 ) 拆下内六角螺栓 M4×10 , 从 HEAD_PLASTIC _RAIL_B R 和 X_ CB_SUPPORT 上卸下 X_ CABLE_BEAR 。 2 ) 拆下 M5 螺母、带垫片六角孔螺栓 M5×14 ,拆下 M5 平垫片、 FC_S UPPOR…

维修调整要领书
1-10
5) X 接近传感器的动作确认。请确认显示项目中的“X-Near”为 OFF 状态。
手动控制将 Head 向左侧移动,移动到让接近传感器通过的位置。
6) 通过后,确认上图的“X-Near”已为 ON。
请再用目视确认 X 接近传感器的 LED 已亮灯。
7) Y 接近传感器的动作确认。请确认显示项目中的“Y-Near”为 OFF 状态。
手动控制将 Head 向身前侧移动,移动到让接近传感器通过的位置。
8) 通过后,确认“Y-Near”已为 ON。
请再用目视确认 Y 接近传感器的 LED 已亮灯。
9) 结束主机软件,当装置处于可以断开电源的状态时,将电源开关 OFF。
10) 请再次接通电源,进行原点复归。
维修调整要领书
1-11
1-3.
塑料导轨的更换
1-3-1.
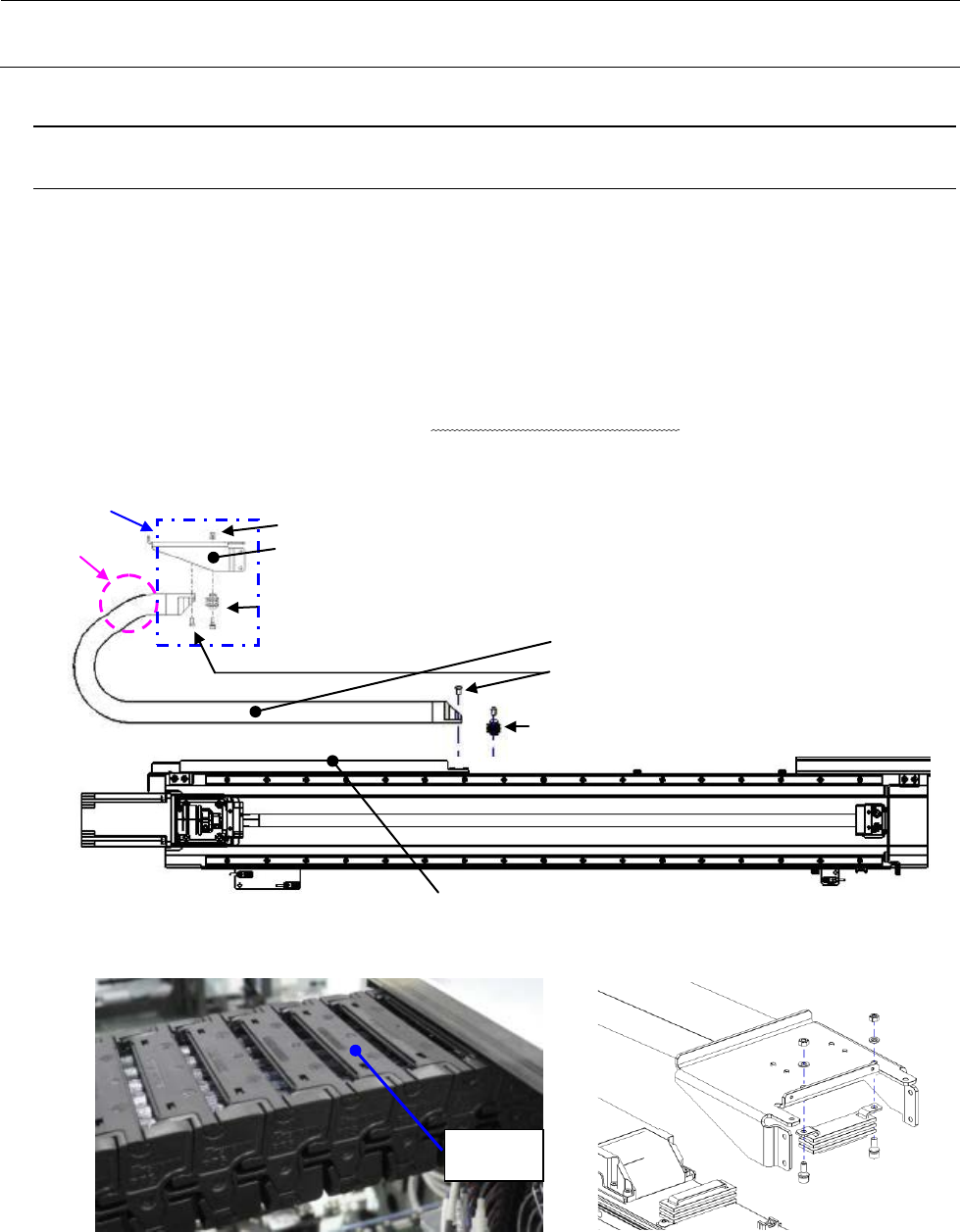
X 轴电缆拖链的更换
● 40110451:X_CABLE_BEAR(L, XL 规格共用)
1) 拆下内六角螺栓 M4×10,从 HEAD_PLASTIC_RAIL_BR 和 X_CB_SUPPORT 上卸下 X_CABLE_BEAR。
2) 拆下 M5 螺母、带垫片六角孔螺栓 M5×14,拆下 M5 平垫片、FC_SUPPORT 和 FC_RUBBER。
3) 拆下圆头螺丝 M5×10,拆下 FC_SUPPORT_X 和 FC_RUBBER。
4) 拆下 X 轴电缆拖链的臂板,取出线束进行更换。
5) 按相反的步骤进行装配。这时,请注意电缆拖链内的线束不要缠绕。
并且,请用手推入 X 电缆拖链内部的线束,确认不绷紧。
图 1-3-1-1 X 轴电缆拖链
A 部
B 部
臂板
M5 螺母、M5 平垫片
CABLE_BEAR_BR (40136796)
六角孔螺栓 M4×10
X_CB_SUPPORT (40110212)
X_CABLE_BEAR (40110451)
A
B
圆头螺丝M5×10
FC_SUPPORT_X (40093858)
FC_RUBBER (L153E321000)
{
FC_SUPPORT_X (40137024)
FC_RUBBER (L153E321000)
带垫片六角孔螺栓 M5×14
{
维修调整要领书
1-12
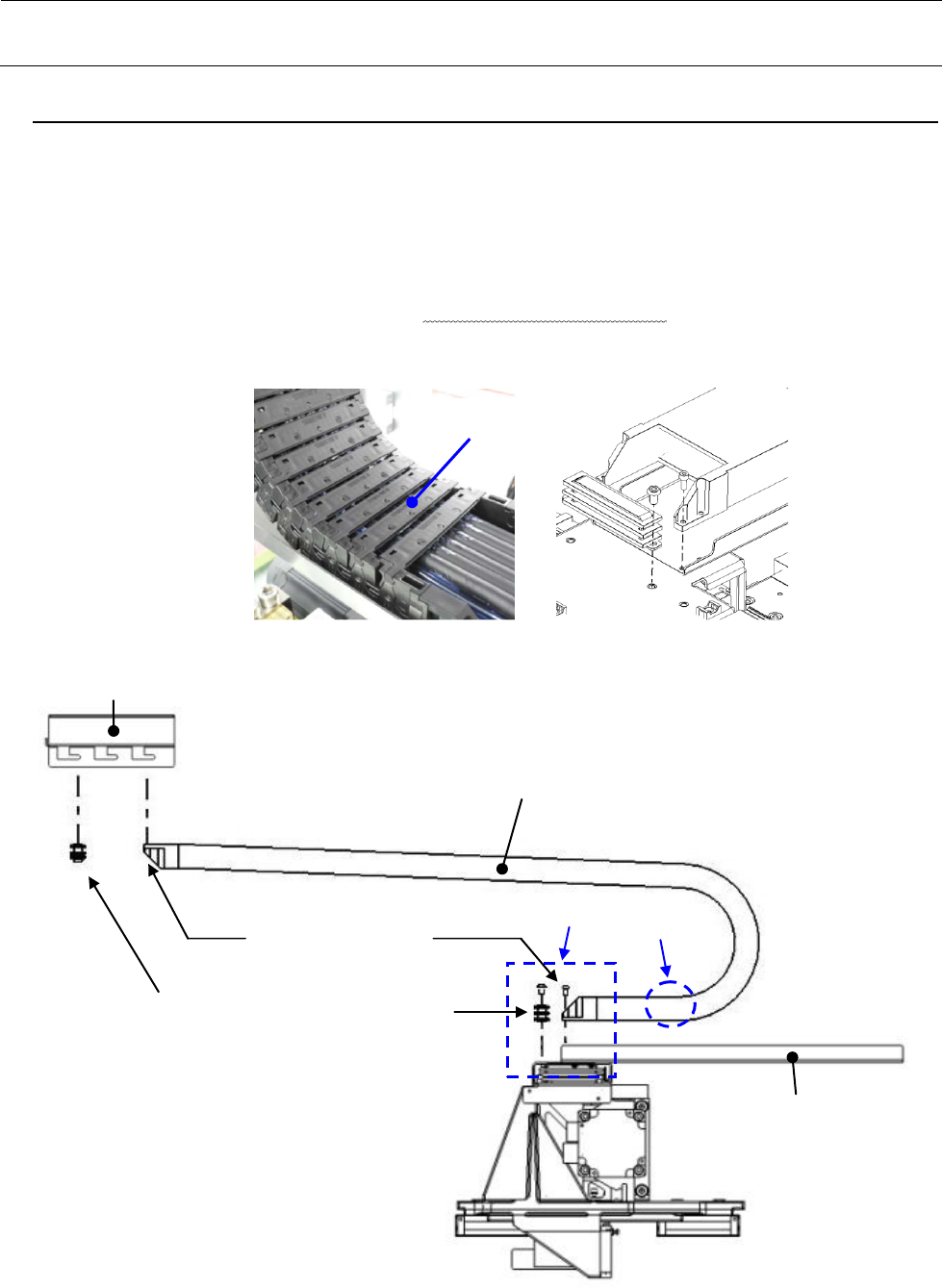
1-3-2.
Y 轴电缆拖链的更换
● 40136750: Y_CABLE_BEAR_L(L, XL 规格共用)
1) 拆下内六角孔螺栓 M4×10,卸下 CONNECTOR_BR 和 Y__CB_SUPPORT 上卸下 Y_CABLE_BEAR_L。
2) 拆下圆头螺丝 M5×10,卸下 FC_SUPPORT_Y 和 FC_RUBBER_Y。
3) 拆下 Y 轴电缆拖链的臂板,取出线束进行更换。
4) 按相反的步骤进行装配。这时,请注意电缆拖链内的线束不要缠绕。
并且,请将 Y 轴移动到最靠身前的位置,用手推入线束,确认 Y 电缆拖链内部的线束不绷紧。
臂板
A 部
B 部
A
B
Y_CB_SUPPORT(40136749)
圆头螺丝 M5×10
FC_SUPPORT_X (40093858)
FC_RUBBER (L153E321000)
{ }
六角孔螺栓 M4×12
CB_BRACKET(40136879)
Y_CABLE_BEAR_L(40136750)