00194044-01.pdf - 第88页
3 Da ti tec nic i Manuale per l'uso S IPLACE F5 H M 3.9 Teste di montaggio Versione software S R.408.xx Edizione 03 /2006 IT 88 3.9 T es te di mont aggio 3.9.1 S truttura de lla test a Collec t&Plac e da 12 se g…
Manuale per l'uso SIPLACE F5 HM 3 Dati tecnici
Versione software SR.408.xx Edizione 03/2006 IT 3.8 Portale
87
3.8.3 Dati tecnici dell’asse X
3.8.4 Struttura dell’asse Y
L’asse Y è composto sostanzialmente dai seguenti gruppi di componenti principali: 3
– Servomotore trifase asse Y
– Cinghia dentata Y
– Sistema guida Y
– Sistema di misurazione assi Y
3
Ogni asse Y viene azionato da un servomotore trifase. Un comando anticrash limita il percorso
di spostamento dei portali l’uno rispetto all’altro. 3
3.8.5 Dati tecnici dell’asse Y
Trasmissioni Servomotore trifase/cinghia dentata
Velocità max. 2,5 m/sec.
Percorso di spostamento 620 mm
Sistema di misura del percorso Riga di metallo lineare
Lunghezza della riga 646 mm
Risoluzione 1,0 µm
Trasmissioni Servomotore trifase/cinghia dentata
Velocità max. 2,5 m/sec.
Percorso di spostamento dei portali 910 mm
Sistema di misura del percorso Righe lineari di metallo
Lunghezza della riga 970 mm
Risoluzione 1,0 µm
3 Dati tecnici Manuale per l'uso SIPLACE F5 HM
3.9 Teste di montaggio Versione software SR.408.xx Edizione 03/2006 IT
88
3.9 Teste di montaggio
3.9.1 Struttura della testa Collect&Place da 12 segmenti
3
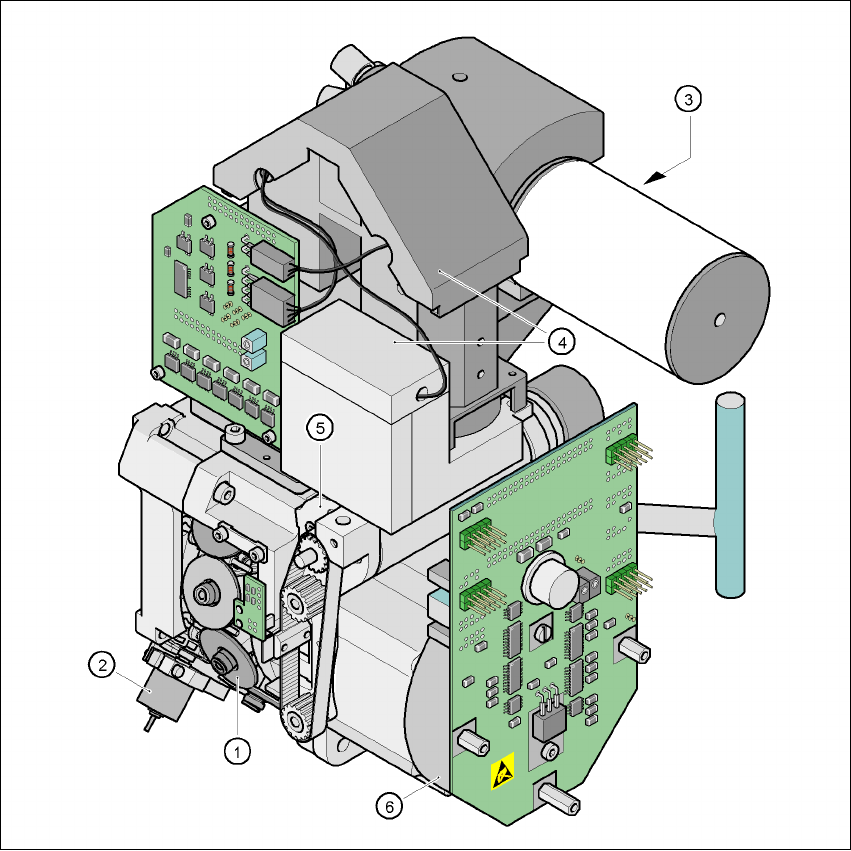
Fig. 3.9 - 1 Struttura della testa Collect&Place da 12 segmenti
Tutti i componenti vengono montati con lo stesso tempo ciclo. Prima che il componente venga
montato, viene misurato optoelettronicamente con il modulo Vision. 3
(1) Stella con 12 bussole (2) Motore, azionatore della valvola "Scarto"
(3) Stazione di rotazione (4) Modulo Vision CO
(5) Trasmissioni asse Z (6) Motore stella
Manuale per l'uso SIPLACE F5 HM 3 Dati tecnici
Versione software SR.408.xx Edizione 03/2006 IT 3.9 Teste di montaggio
89
– La videocamera Vision CO produce un’immagine del componente accettato.
– Viene anche determinata la posizione esatta del componente.
– La forma involucro del componente accettato viene paragonata alla forma involucro program-
mata per identificare il componente. I componenti non identificati verranno scartati.
– La stazione di rotazione ruota il componente alla posizione di montaggio richiesta.
3.9.2 Descrizione della testa Collect&Place da 12 segmenti
– La testa Collect&Place da 12 segmenti funziona in base al principio Collect&Place, ovvero i
componenti vengono accettati dalle pipette con l’aiuto di un vuoto e posizionati delicatamente
e nella posizione esatta sul circuito stampato con l’aiuto di un getto d’aria dopo un ciclo com-
pleto di accettazione. Allo stesso, tempo, viene controllato più volte il vuoto nelle pipette per
stabilire anche se i componenti siano stati prelevati, ovvero posizionati correttamente.
– La modalità "intelligente" Sensorstopp dell’asse Z regola l’aplanarità CS quando vengono de-
positati i componenti.
– I componenti errati vengono scartati e montati successivamente in un ciclo di riparazione.
3.9.3 Dati tecnici della testa Collect&Place da 12 segmenti
3
Gamma di componenti 0201
a)
a 18,7x 18,7mm² incl. BGA, µBGA, Flip-
Chip, TSOP, QFP, PLCC, SO a SO32, DRAM
Altezza max. 6 mm
Reticolo min. piedini 0,5 mm
Reticolo bump min. 0,35 mm
Diametro min. Ball-/Bump 0,2 mm
Misure min. 0,6 x 0,3 mm²
Misure max. 18,7 x 18,7 mm²
Peso max. 2 g
Potenza di montaggio 11.000 CO/h
Forza d’appoggio programmabile Da 2,4 a 5,0 N
Tipi di pipette 9xx
Precisione angolare ± 0,525° / 3 σ, ± 0,70° / 4 σ, ± 1,05° / 6 σ
Precisione di montaggio ± 67,5 µm / 3 σ, ± 90 µm / 4 σ, ± 135 µm / 6 σ
a) Con kit speciale 0201