ServiceManual_UR3_zh_3.2.6.pdf - 第27页
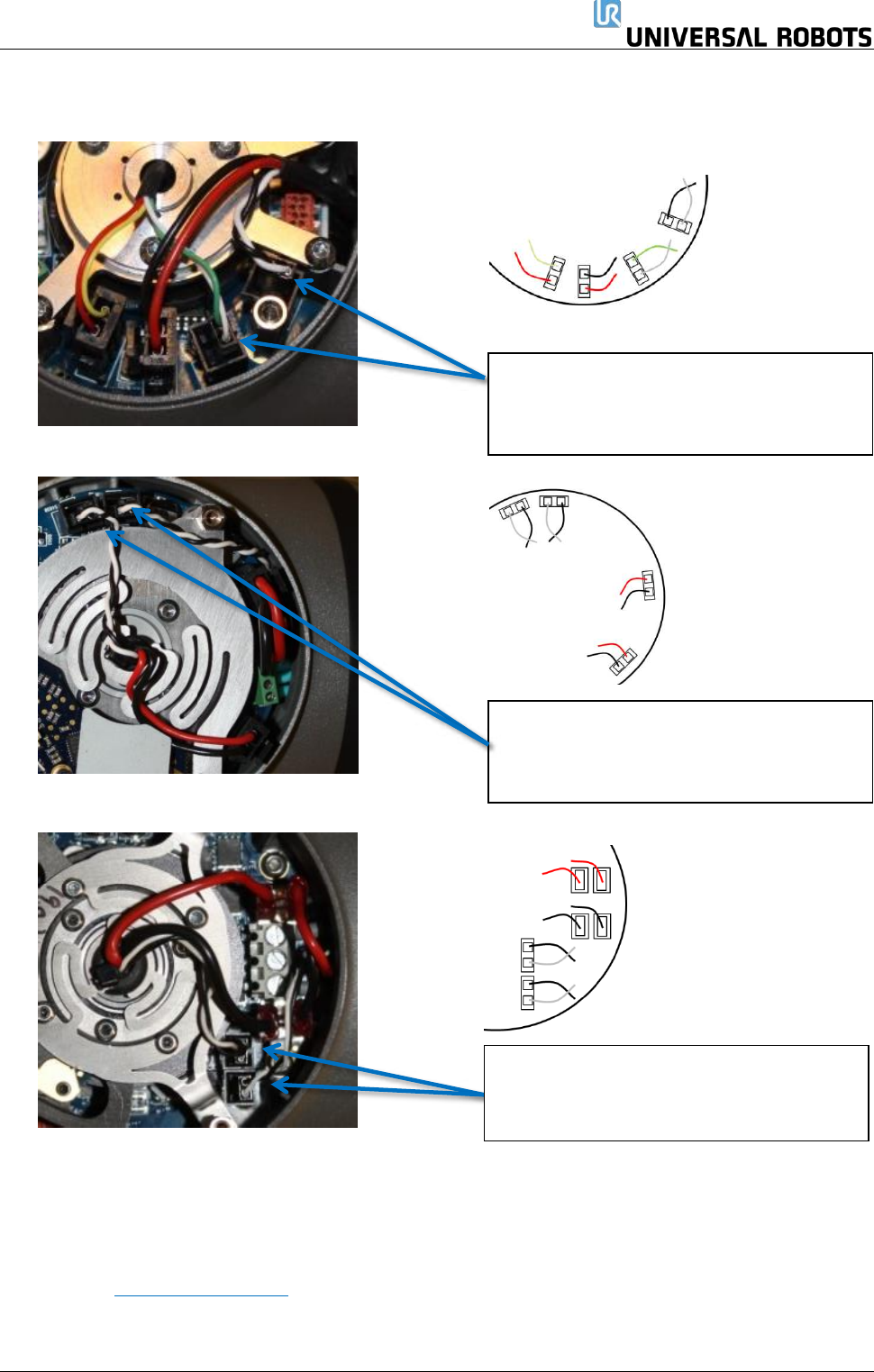
保留所有 权 利 27 Servicemanual_UR3 _en _3.2.6 5. 连接电缆: 尺寸 0 关节。 尺寸 1 关节。 尺寸 2 关节。 6. 连接前,将通信电缆扭转 1.5 至 2 个整圈 7. 将蓝色盖子安装在关节 上,并上紧至 0.4Nm 。 8. 继续查看 3.1.16 双机械 臂校准 有关如何校准机器人 的说明。 连接前,将 通信电缆 扭转 1.5 至 2 个整圈 (可降低系统中的电气 噪声) 连接前,将 通信…
保留所有权利 26 Servicemanual_UR3_en_3.2.6
4. 将黑色特氟隆环(用红色表示)滑动到位,并轻轻地将新的扁型环放回至特氟隆环的顶部。
保留所有权利 28 Servicemanual_UR3_en_3.2.6
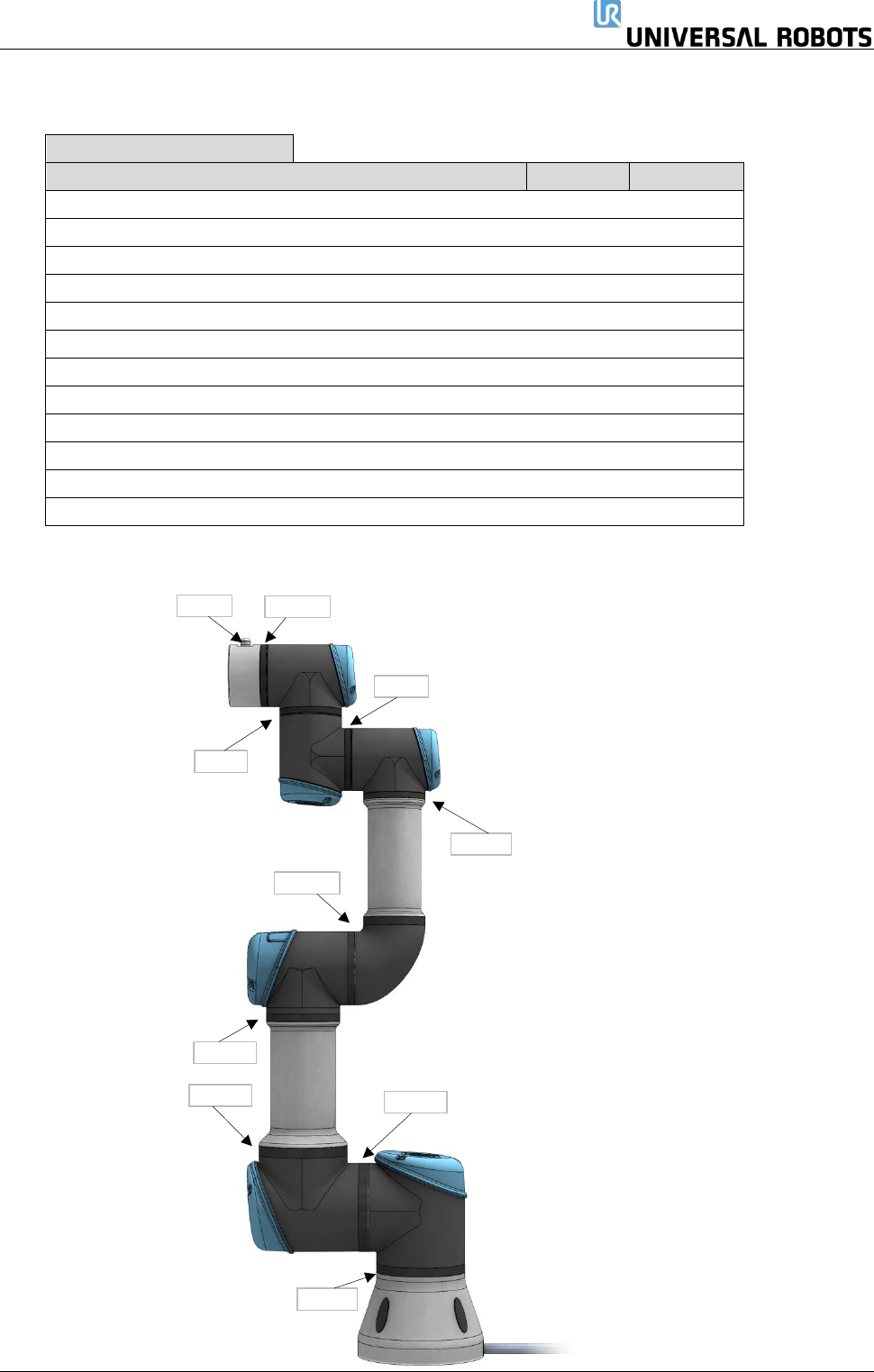
3.1.5 扭矩值
UR3 扭矩值
连接
扭矩
头部尺寸
底座安裝支架
J0 底座
3.0Nm
梅花头 T20
[J0] 底座
[J1] 肩部
3.0Nm
梅花头 T20
[J1] 肩部
上臂
3.0Nm
梅花头 T20
上臂
[J2] 肘部
1.3Nm
梅花头 T10
[J2] 肘部
下臂
1.3Nm
梅花头 T10
下臂
[J3] 手腕 1
1.3Nm
梅花头 T10
[J3] 手腕 1
[J4] 手腕 2
1.3Nm
梅花头 T10
[J4] 手腕 2
[J5] 手腕 3
1.3Nm
梅花头 T10
[J5] 手腕 3
工具固定托架
1.3Nm
梅花头 T10
蓝色盖子:底座、肩部和肘部
0.4Nm
梅花头 T10
蓝色盖子:手腕 1、手腕 2 和手腕 3
0.4Nm
梅花头 T8
工具连接器
0.3Nm
手指/手
注意:使用前,单击扭矩工具 3 次,以确保正确的校准扭矩。
1.3Nm
1.3Nm
1.3Nm
1.3Nm
1.3Nm
1.3Nm
3.0Nm
3.0Nm
3.0Nm
0.3Nm