ServiceManual_UR3_zh_3.2.6.pdf - 第47页
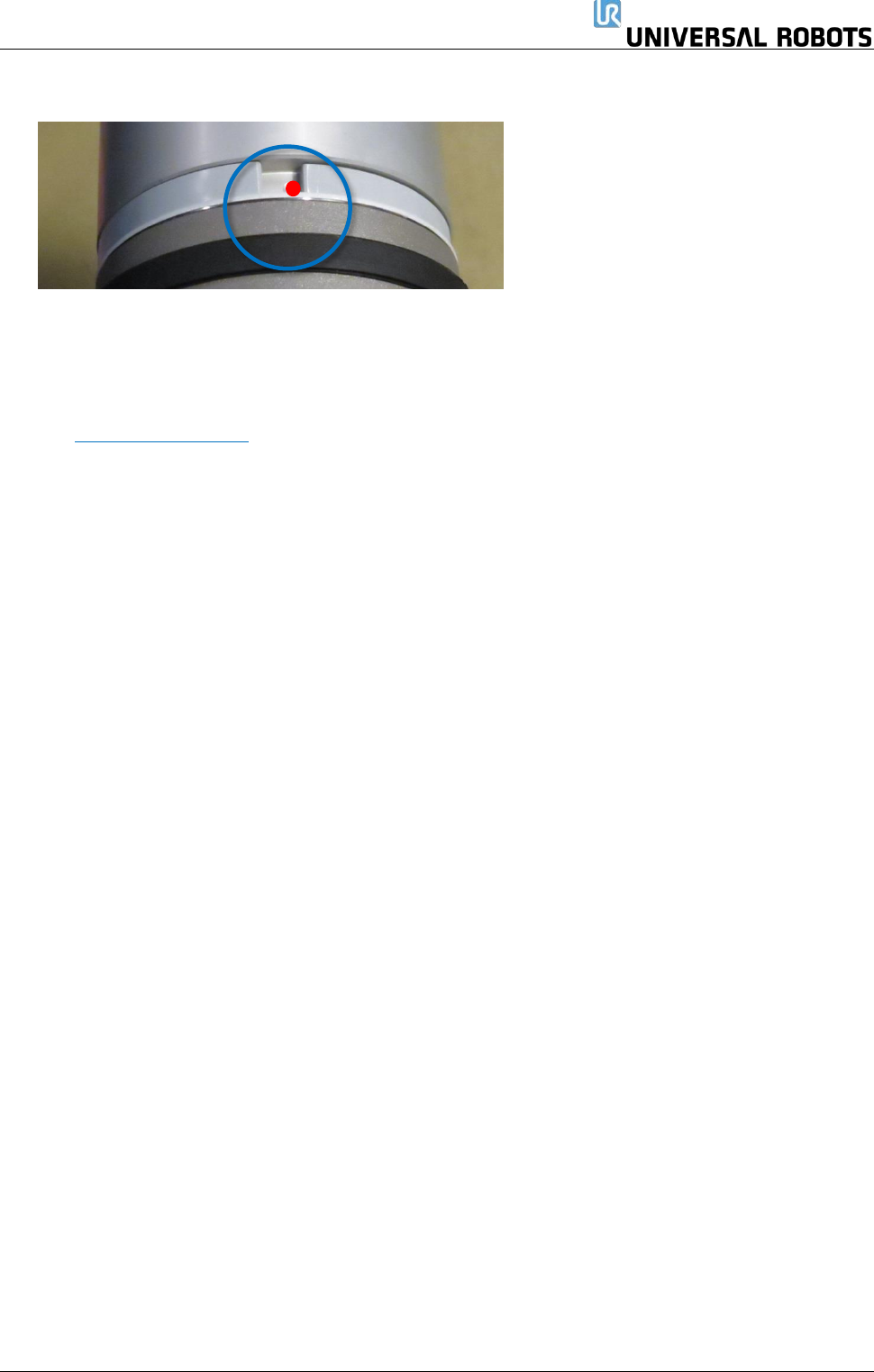
保留所有 权 利 47 Servicemanual_UR3 _en _3.2.6 3.1.15 校准关节的 说明 更换后,需要校准新关 节,以找到正确的零位。 如果可能(准备好双机 械臂校准套件和相同型号 的第二个机 器人)且需要( 需要尽可能高的位置精 度,和与关节更换前示 教位置的最小偏差),请 执行 3.1.16 双机械臂校 准 。或者,执行如下所示的 简单关节校准。 校准关节的说明: 1. 机器人点动至原点位置 图示显示原点位置…

保留所有权利 48 Servicemanual_UR3_en_3.2.6
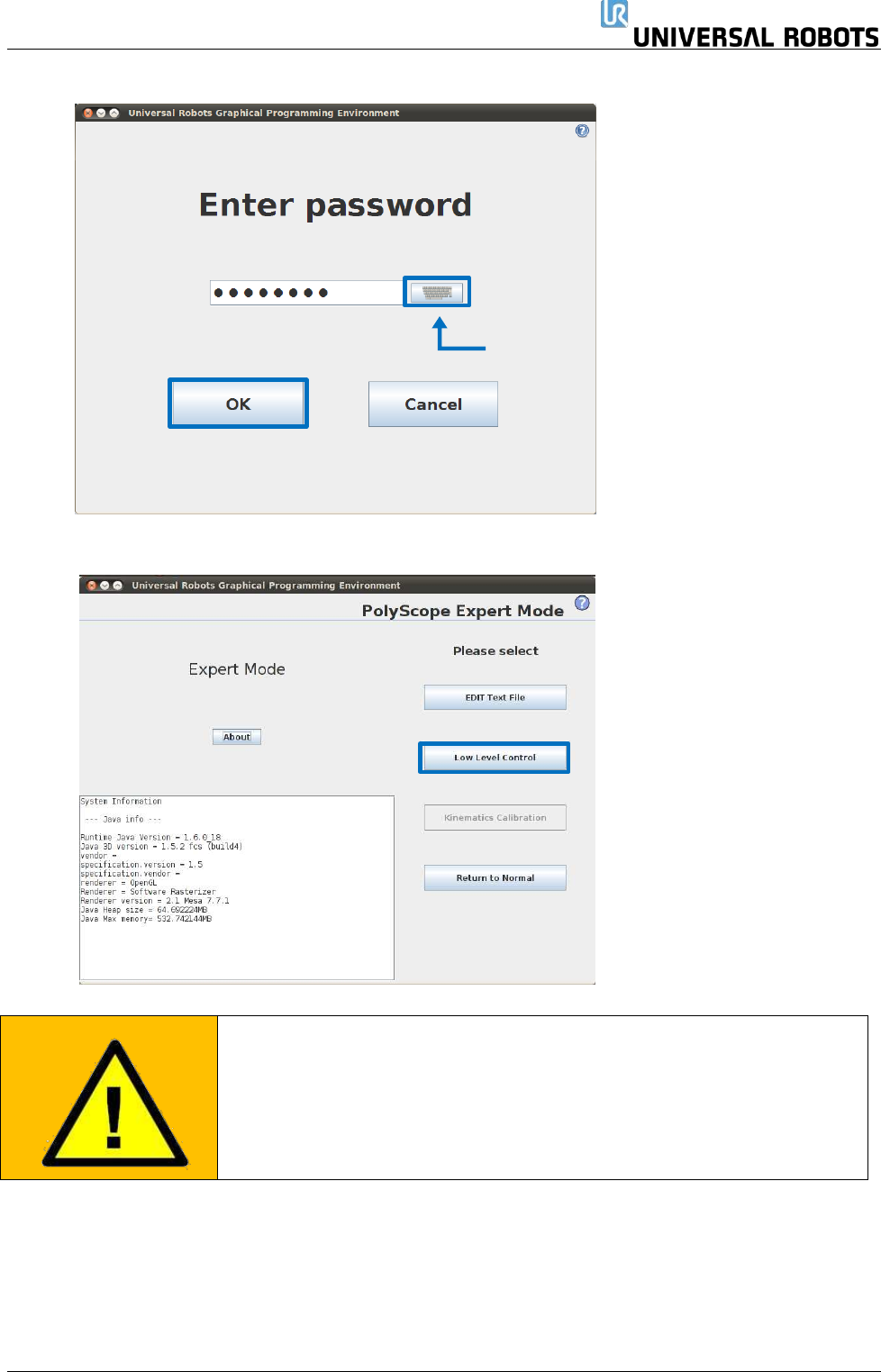
3. 输入密码 lightbot,并按下 OK
(确定)。
4. 现在,您进入Expert Mode
(专家模式),请按下
Low Level Control
(低级控制)。
警告:
在Low Level Control(低级控制)中,只有 Polyscope 装置选项卡中
的安全设置活动。 保护性停止停用。
移动机器人前,将所有安全设置置于最低设置。
lightbot