ServiceManual_UR3_zh_3.2.6.pdf - 第51页
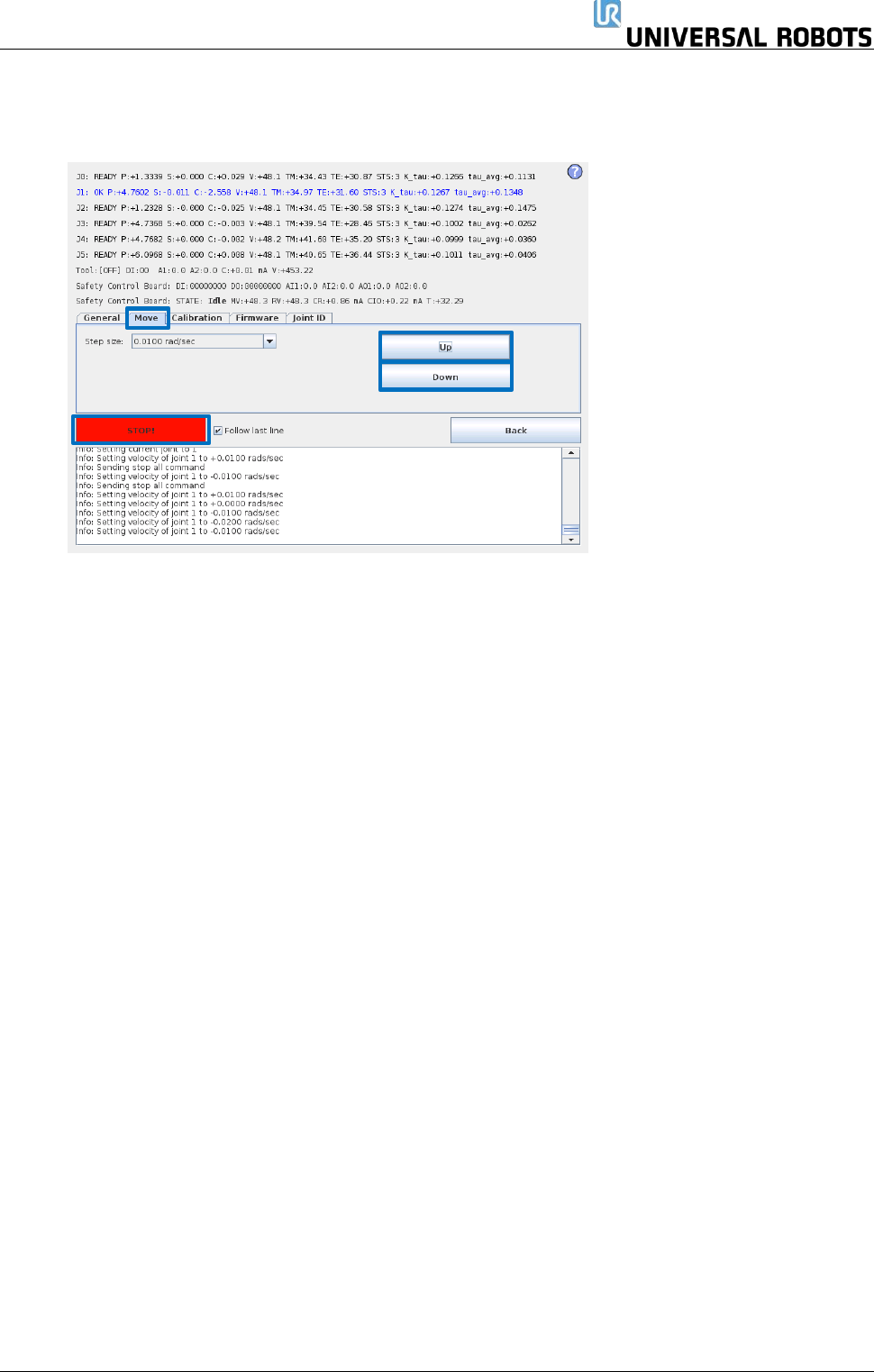
保留所有 权 利 51 Servicemanual_UR3 _en _3.2.6 在 Move (移动)窗 口中,使用 Up (向上) 和 Down (向下) 按钮,将关节旋转到 正确的零 位。 当关节处于正确位置时 ,按 STOP (停止) 键。
保留所有权利 50 Servicemanual_UR3_en_3.2.6
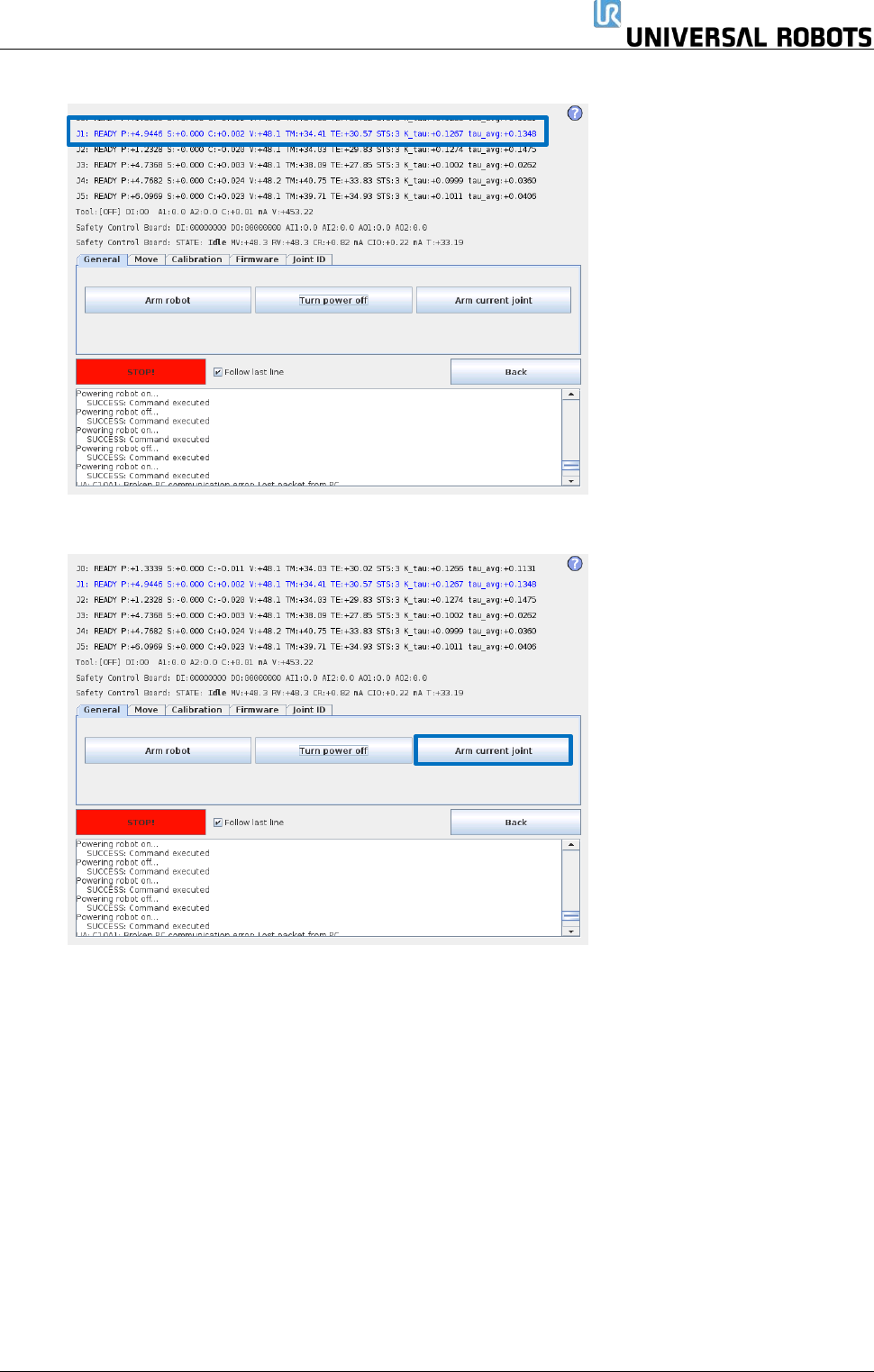
7. 直接单击相关关节的状态行,选择该关节。当前选定的关节以蓝色突出显示。
8. 按
下
Arm current joint
(装备当前关节)
,释放选定关节上的制动器。
保留所有权利 51 Servicemanual_UR3_en_3.2.6
在 Move(移动)窗口中,使用 Up
(向上)
和 Down
(向下)
按钮,将关节旋转到正确的零
位。
当关节处于正确位置时,按 STOP
(停止)
键。
保留所有权利 52 Servicemanual_UR3_en_3.2.6
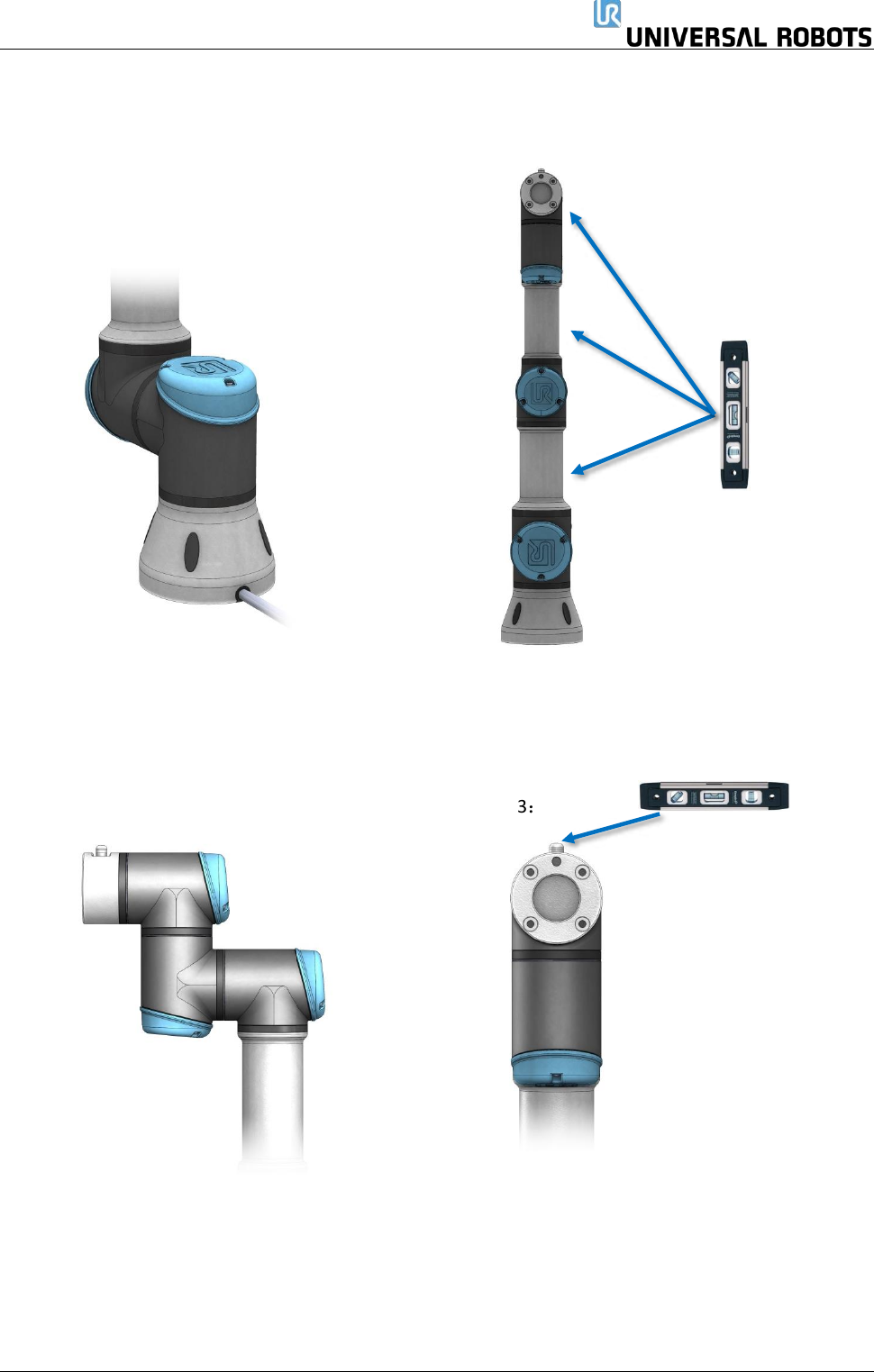
9. 零位例图
底座: 肩部、肘部、手腕 1:
底座零位对齐,以便输出法兰从垂直
对准偏离 180 度机器人底座后面的电
缆。
肩部、肘部和手腕 1 零输出法兰(假设底座
水平)。
确保机器人底座处于水平状态,用水准仪对
齐关节。
手腕 2: 手腕 3:
手腕 2 零位对齐类似至底座关节及工
具法兰平行带有手腕 1 输出法兰。
手腕 3 零位对齐,以便工具连接器指向上方。
在工具孔中安装两个螺栓,并用水准仪对齐关
节。